APPLICATION OF SMALL SCALE ROBOTS IN ??? CONSTRUCTION – Applied Theory
Introduction
This research paper focuses on:
- study of the importance of ROS and the key role of ROS in bridging the gaps in robotization in the construction industry.
- How small scale robots can be useful in the construction industry.
Motivation
We start looking into the feasibility of using robotic applications for various tasks in construction sites and specifically forecast small-scaled robots can bring more potential for this path.
Questions:
- Why has robotics in construction not been at maturity, as compared to other fields such as automation, industrial manufacturing?
- What kinds of tasks can have robots ? Different from the traditional approach, which parts can they improve?
- What are the problems for “Digitizing Construction” ?
Only due to the nature of construction ? Or software or Hardware limitation?
Or economic factors ? - Why will small scaled robots be better for construction?
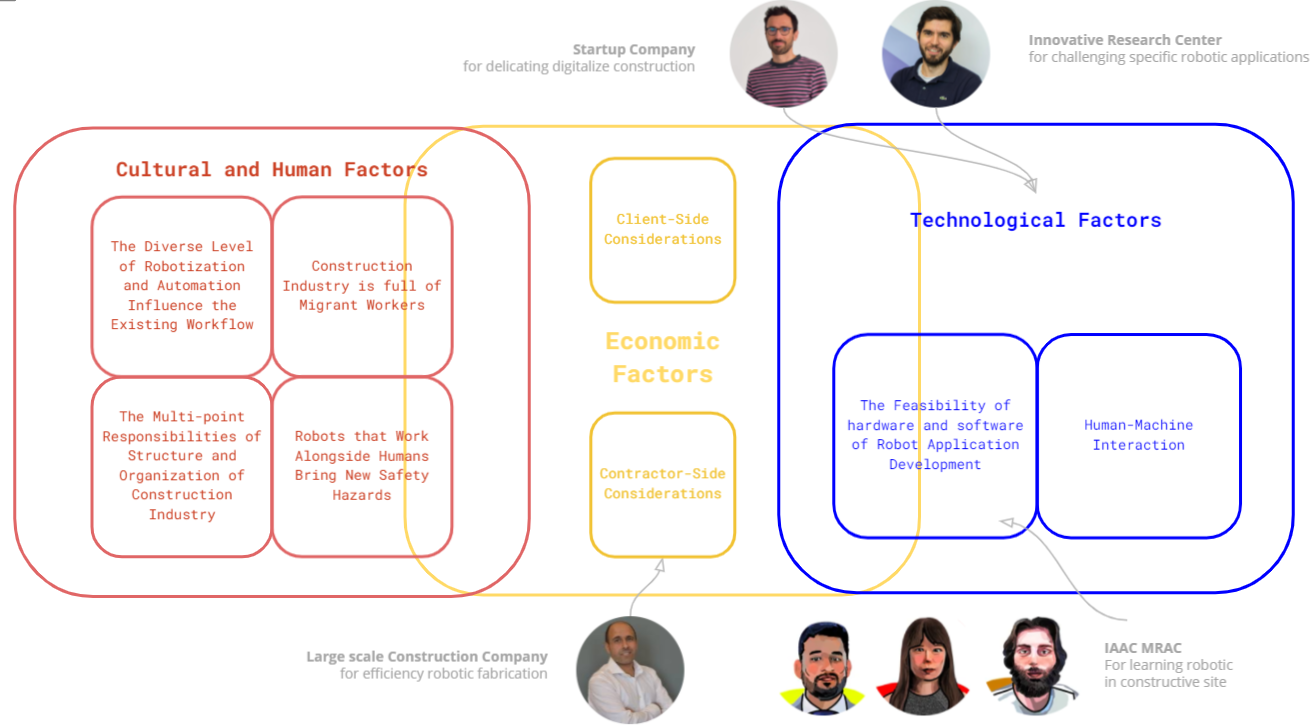
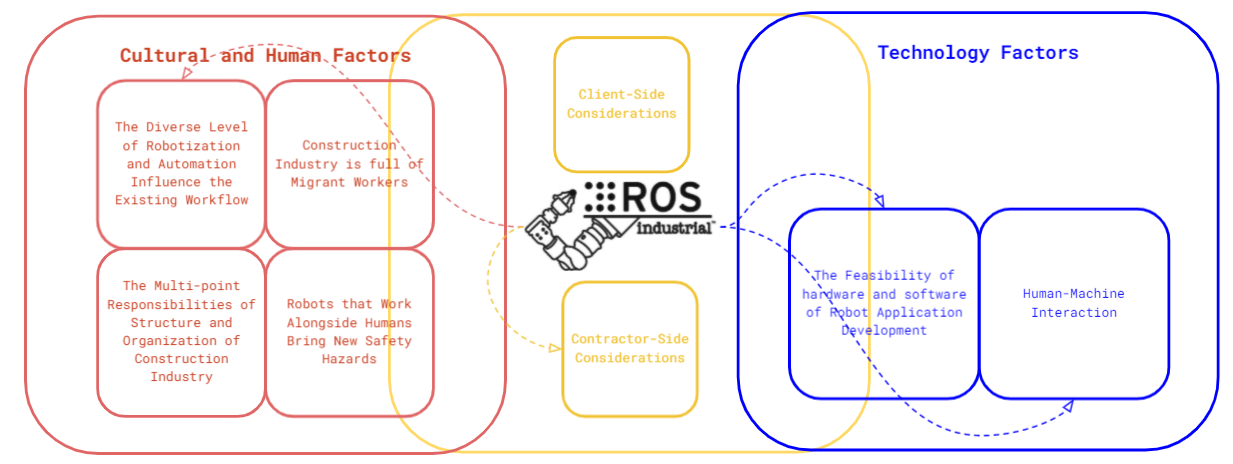
Overall there are following factors which are the main challenges for robotization in construction industry:
- Cultural and Human factors
- Economical factors
- Technology factors
Cultural and Human factors
This factor varies from country to country. But it, can be summarized in some common factors.
The Diverse Level of Robotization and Automation Influence the Existing Workflow
- Insecurity of robots taking over the job.
- The workers lack the ability and inappropriate training to handle the robots, which require continuous monitoring.
- There is also consideration of workers not willing to participate, possibly the older generations who might not be interested or might not have the aptitude to learn the necessary skills.
Construction Industry is full of Migrant Workers
- In the countries which rely on migrant workers, there is the possibility of communication barriers and unwillingness of the employers to spend money on training these workers.
Robots that Work Alongside Humans Bring New Safety Hazards
- The increasing use of robots that work alongside humans brings new occupational safety hazards, but there’s not much data available on mitigating risks. Safety is a part of robot design and also how the user is using it.
Economical factors
The Feasibility of Hardware and Software of Robotic Applications
- For the majority of robots products, their software is often confidential.
Such a situation limits the collaboration from different background experts and hinder to extended applications. - The robotic application in construction involves the teamwork of specialized people.
It is a great challenge to find a good collaboration platform for sharing and integrating hardware and software knowledge.
Human-Machine Interaction
- It is a critical factor for the construction industry, given its labor-intensive tasks and the expected gradual adoption of robotics.
- Effective collaboration between humans and robots will be essential for successful adoption.
However, nowadays, related research that can explain and address the complexity of this interaction is just starting.
Technology Factors
Client-Side Considerations
- The current tendering practice that prioritizes “lowest price” as the most important criterion to award projects represents a big limitation to innovation, especially in robotization.
- In a highly competitive market, if the price is the only selection criteria, construction companies tend to reduce profit margins aggressively,
and the adoption of new technologies is restricted.
Contractor-Side Considerations
- High initial capital investments are justified because they will reduce expensive manual labor and increase productivity. However, for many construction companies, these advantages are not always realizable and there are risks.
Imad Itani ( Interview 01 ) also highlighted this worry.
- In this labor intensive industry, some companies emphasize productivity with manual work and feel no strong need for robotization, even though they know these investments can improve the working condition.
Robotization Analysis
Construction being a dynamic and random environment, we need to understand the level of optimum automation practically possible in activities of construction. As crossing the optimum line of automation is uneconomical.
This is an essential process that needs to be established due to following reasons:
- Robotization analysis can lead to a precise understanding of robot productivity, quality parameters, etc and assist in comparison against standard construction manual methods.
- It will assist in establishing a clear understanding of tasks for robots and humans in construction.
- And eventually, it can be helpful in effective collaboration.
There are several researches which represent levels of automation in different hierarchies. Below are some important ways automation levels can be represented.
Scale of degree of robotization
Degree of automation can be of different levels in which computer. it can be basically classified in 10 levels. Starting from level 1 where computer offers no assistance. moving further from level1 towards level 10 assistance of computer increases. Level 10 can be described as complete automation where no human involvement is needed except the first input.
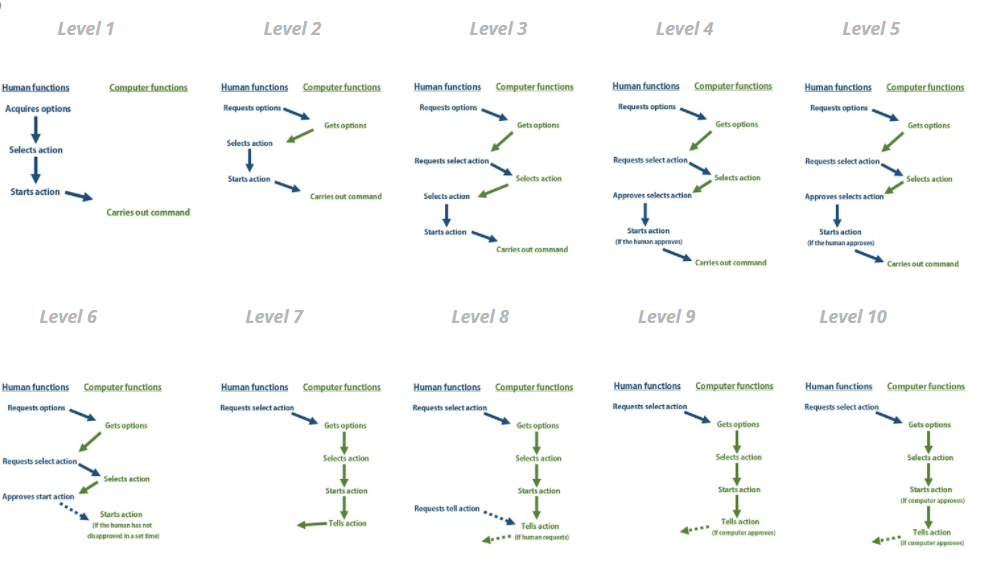
Above image represents 10 levels of automation/scale of degree of robotization (ref – www.petrowiki.spe.org)
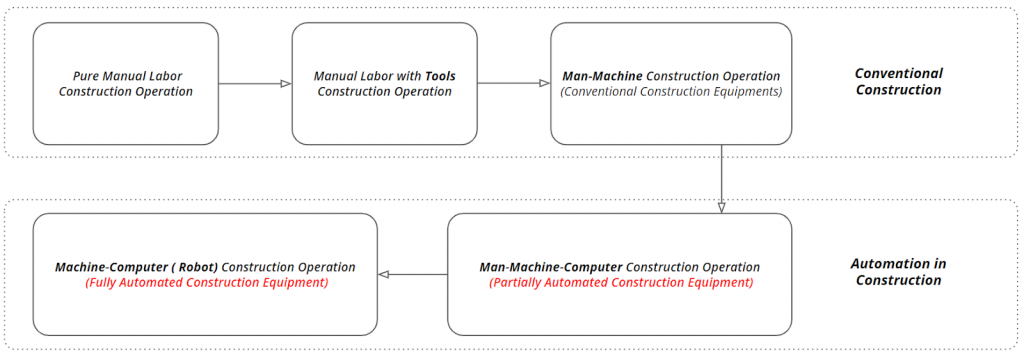
Above image shows the roadmap of automation in construction and the goal we look for (ref- ROBOTIC FEASIBILITY IN CONSTRUCTION |Georgia Institute of Technology)
Automation levels can be divided into following categories:
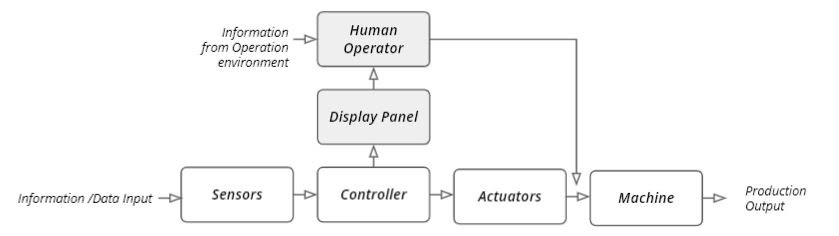
Conventional system

Conventional system takes input from humans. No interruptions or any feedback from the computer is involved.
Partially automated system
Partially automated system can have either of sensors, controllers, actuators and both human and computer feedbacks/interruptions are involved.
Fully automated system
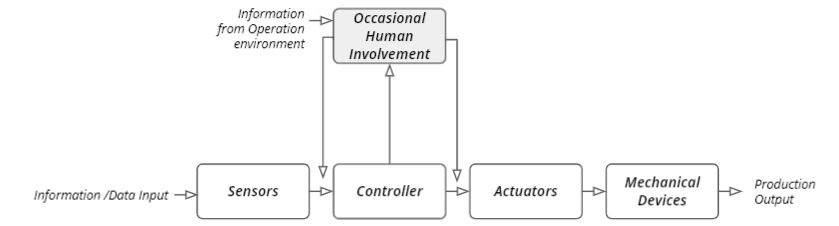
Fully automated system is just need a input and the rest process is taken care by the computer
Cultural and Human Factors
Robotization analysis
A modeling procedure is needed to evaluate the feasibility of developing robotics and justifying the implementation of robotics for certain construction operations.
The goal is to develop a generalized model for evaluating the suitability of robotics applications in the construction industry. That is, what construction operations can be robotized?
To answer this question, a robotization Index I, must be obtained such that a given value or range of values indicates whether robotics is feasible for a particular construction operation at a given point in time. A linear scale of the index can be utilized.
Any construction operation, if desired to be robotized, can be analysed under these categories. Since each construction operation is unique in nature, therefore, each operation will have different weight factors to the above variables depending on their level of importance in the operation
To determine this index, the following variables affecting on the feasibility of the robotics are considered:
- Technologically Feasible
- Level of Hazardous
- Productivity
- Quality Improvement
- Standardization of Design and Level of Repetitiveness
- Cost Effectiveness and Economical Analysis
Technologically Feasible
In this section, analysis is required on what robots are available for the relevant activity and which one will be much more efficient ( if options for robots are available ). All the possible robot options for a task should be listed.
Level of Hazardous
The hazardousness of the activity should be analyzed. Hazardous activities should get preference for robotization over non hazardous activities as robots can be exposed to hazards rather than humans.
Productivity
In order to determine if a particular operation is suitable for robotization from the point of view of productivity, it is necessary to set a desired or expected productivity level.
Productivity of an operation is measured by dividing the total number of units produced by the total amount of resources utilized in a determined period of time.
If a construction operation is automated or robotized, it is expected to have a sharp increase in productivity. The increased productivity, supposedly, gradually absorbs the cost incurred in the robot or automated equipment implementation. In some situations, the productivity achieved by a robotized operation remains the same, but substantial savings are expected to occur in other cost categories such as labor , overhead, etc., or even cost savings achieved by a better quality of the work.
Quality Improvements
One major reason for the implementation of robots is to produce a better quality compared to traditional systems. The quality of a construction product can be measured by a numerical model which considers such characteristics as strength, dimension, color, and etc.
Standardization of Design and Level of Repetitiveness
A construction operation should be broken down into individual processes, tasks, and subtasks. The amount and type of repetition in each of these work divisions should be analyzed. Standardization of design also involves repetition but on a larger scale.
This parameter evaluates the number of production units required for successful robot implementation. Justification depends upon whether the number of production units falls within an optimum range. Simplifying the construction design would in turn simplify the robot’s job, reduce the necessary ‘learning period’ (teaching and reprogramming), and thereby increase robot effectiveness. Standard design and repetitive operation are two factors that are required for robotization or automation of any construction operation. Several construction projects involve a determined amount of repetitive operations but it does not mean that this operation should be immediately robotized. Basically, the decision is based on quantity parameters.
The standardization of design is highly dependent upon the future acceptance of limited design individuality in construction projects and the future development of robots to handle the various requirements of the construction site.
Cost Effectiveness and Economical Analysis
Capital investments are based on the evaluation of the spending requirements and the returns generated over the lifetime of the equipment. Sometimes a particular construction operation is technologically feasible but not financially. To determine whether a robot is economically feasible, costs and benefits should carefully be studied. There are basically two major economic analysis techniques for evaluating the desirability of a robot: 1) payback period analysis; and 2) cash flow analysis.

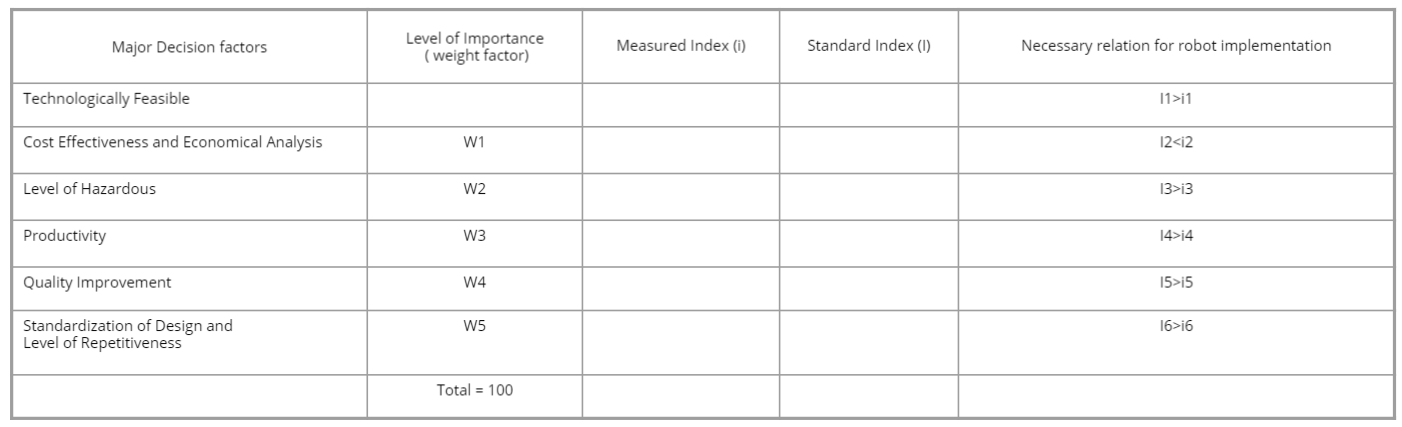
Based on the above parameters and outcomes of those parameters, each parameter should be assigned a weight and all the weights can be inserted into the above table.
One of the most important challenge for the construction industry is to set the Standard index. I.e. optimum expectancy from a robot as an output w.r.t to each parameter, in order to have something to compare with
Once we can compare the Standard index with the Measured index. Robotization index can be analyzed based on which decisions can be made on which particular task can be robotized and upto what level, and which robot implementation will be optimum.
Technological Factors
We had a dive in the tasks existing in the construction industry to understand the tasks and the robots available related to each task.
Construction activities can be broadly classified as follows:1. Survey, 2. Earthwork, 3. Rebar, 4. Formwork, 5. Concrete, 6. Blockwork, 7. Wall/Ceiling finishing, 8. Material Handling, 9. Architectural assemblies.
After a brief look into activities of construction, we listed the robots available for each activity.
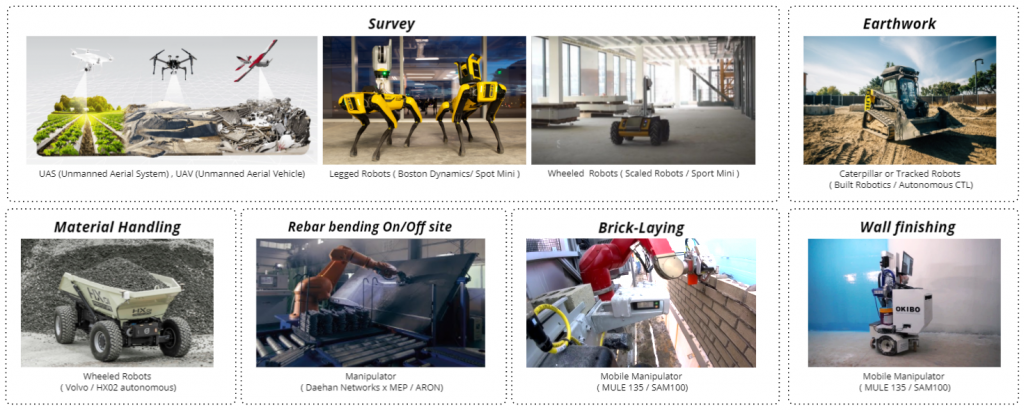
The above image shows a few efficient robots readily available in the construction industry.
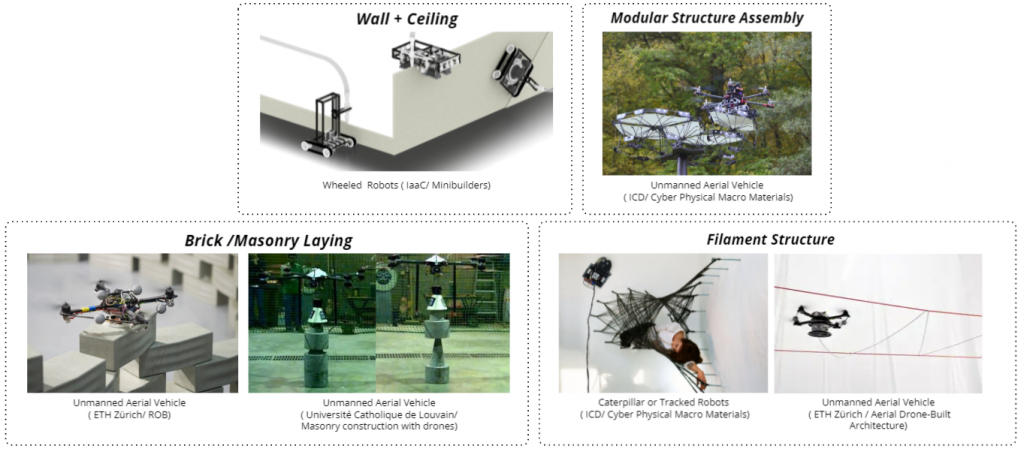
The above image shows a few robots used during research at academic level.
At this stage, we tried to explore the software’s used by these robots and found that most of the robots are run on different confidential platforms which make it unable for the user to use the robots at much broader scale which is one of the major reason of hindrance in robotization in the construction industry.
We felt a need for exploration in the direction of open source software for robots.
What is ROS (ROBOT OPERATING SYSTEM)?
The Robot Operating System (ROS) is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms. (Reference –
https://www.ros.org/)
- High-end capabilities
- Support high-end sensors and actuators
- Tons of tools
- Modularity
- Active community.
Why ROS?
- ROS makes it easy to combine different types of sensors, hardware’s, etc. Most of the sensors existing have supporting libraries available ready to use and saves a lot of time for the users.
- Lots of existing libraries for different types of robots, sensors, hardware’s. Libraries can be downloaded from sources such as GitHub and ROS website.
- ROS has a huge and active community which is one of the biggest reason of ROS success.
- ROS is one of the most popular robotics software.
Comparison between software’s used by commercial construction robots.
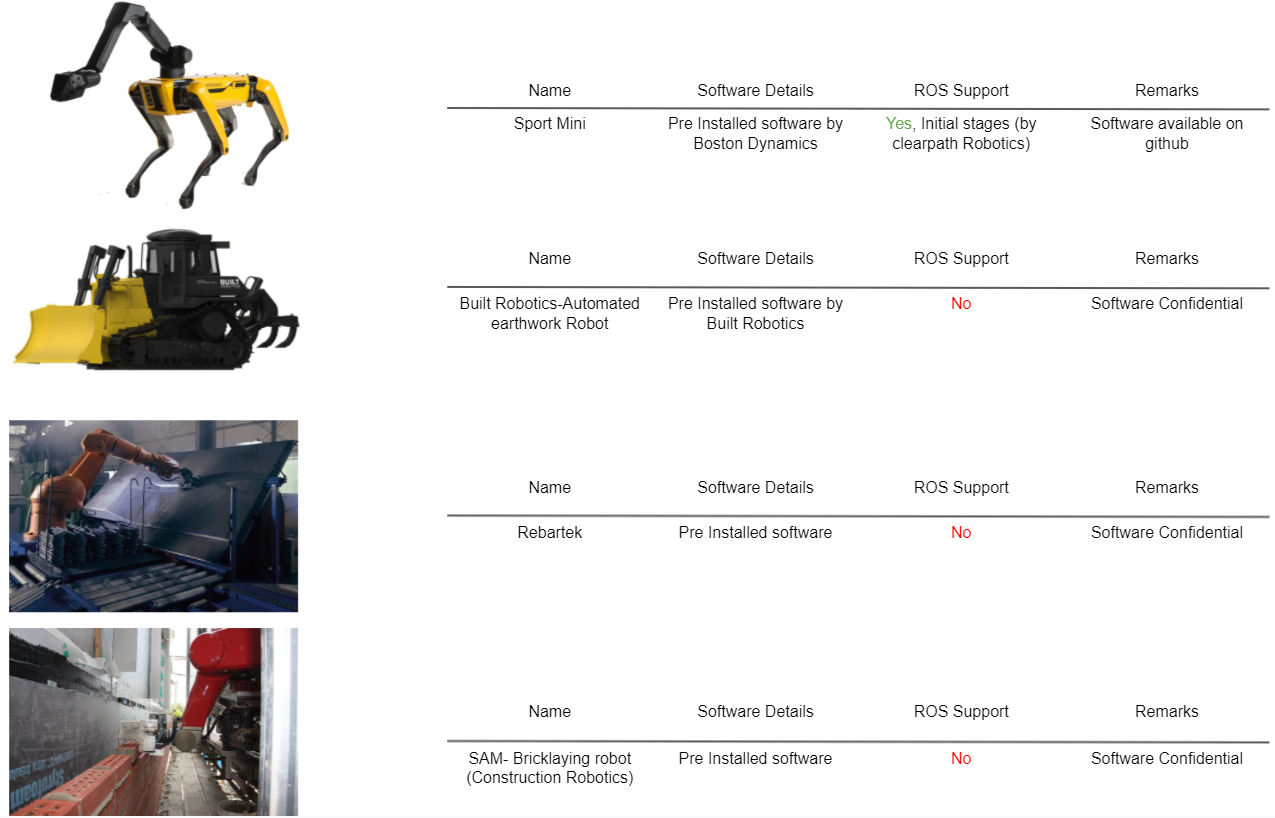
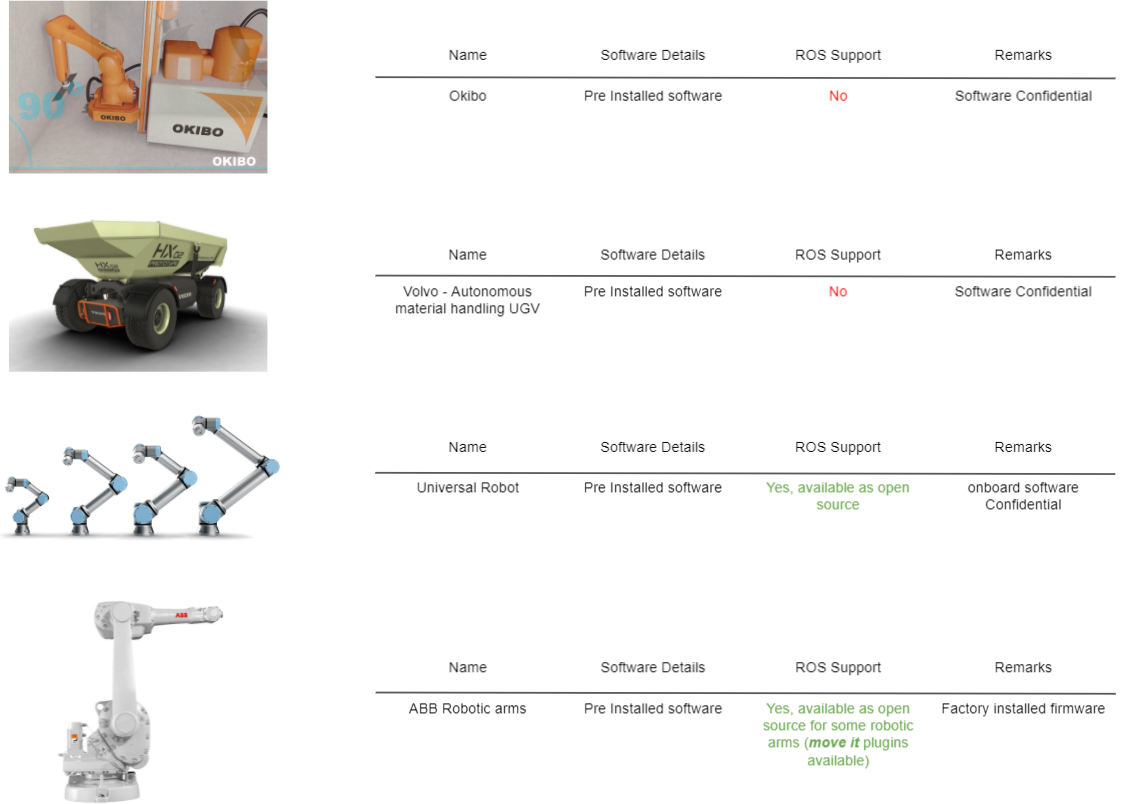
Comparing multiple construction robots, we found that most of the robots work on confidential company owned closed source software’s which does not allow the users to have broader usage other than specified for what the robot is designed. The commercial robots for which ROS support is available such as UR, ABB robotic arm are proved to have wider use with implementation of ROS.
Alternatives to ROS
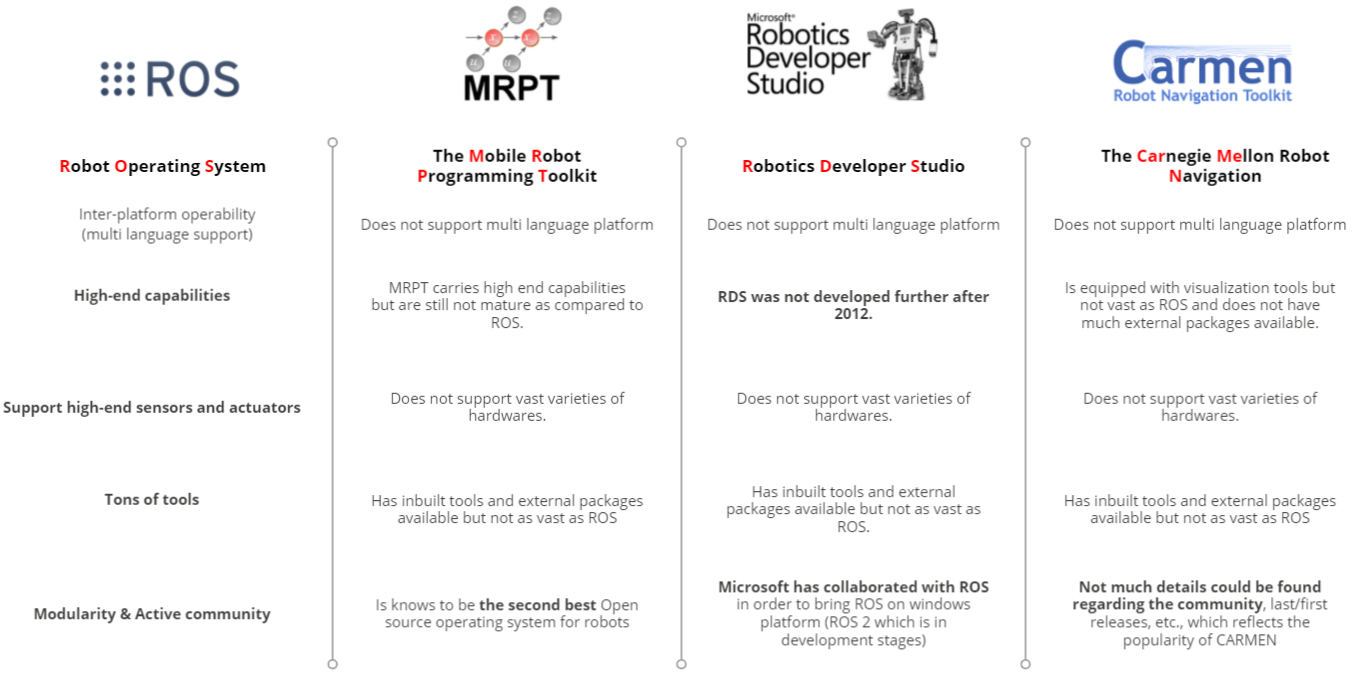
Above image shows a few alternatives to ROS.
MRPT is the second widely used open source robotics software after ROS. Microsoft Robotics Developer Studio was a Windows-based environment for robot control and simulation. It was aimed at academic, hobbyist, and commercial developers and handles a wide variety of robot hardware with its last release in 2012. it has been discontinued and Microsoft has been involved in development of ROS2. Another alternate is Carmen, which is not as developed as compared to ROS and other options. Its community is not very active and it does not have much supporting libraries. Not much details could be found regarding its community.
Personal experiments – I

Project Goal
Project aim was to generate the proper trajectory, which is based on a raw 3d point cloud, to make the fine point cloud for making a 3D model.
Hardware Used
The BEBOP 2 is designed to fly indoors and outdoors. Its flying range of up to 2 kilometers, so the BEBOP 2 will delight those who love long flights.
( Parrot.com)
This drone doesn’t include in the ROS-Enabled Drone category of ROS|robots, but it has few packages in ROS.org
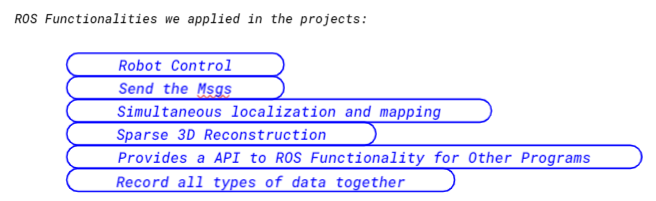
ROS Application
The main package is bebop autonomy ,which is a ROS driver for Parrot Bebop drone based on Parrot’s official ARDroneSDK3.
We chose the ORB-SLAM2, real-time SLAM library for Monocular, Stereo and RGB-D cameras that computes the camera trajectory and a sparse 3D reconstruction. It is able to detect loops and re-localize the camera in real time. All data I/O is handled via ROS topics. For visualization you can use RViz.
In this project, in order to improve more better quality of visualization than the rviz offered and generate the trajectory, we use Rosbridge_suite ( a meta-package containing ros-bridge, various front end packages for ros-bridge like a Web-Socket package, and helper packages ) to transfer real-time data which was produced from ORB SLAM to Rhinoceros Grasshopper.
In order to collect all data at the same time, we use Rosbag for recording from and playing back to ROS topics. It is very convenient to set up experiments.
Personal experiments – II
Project Goal
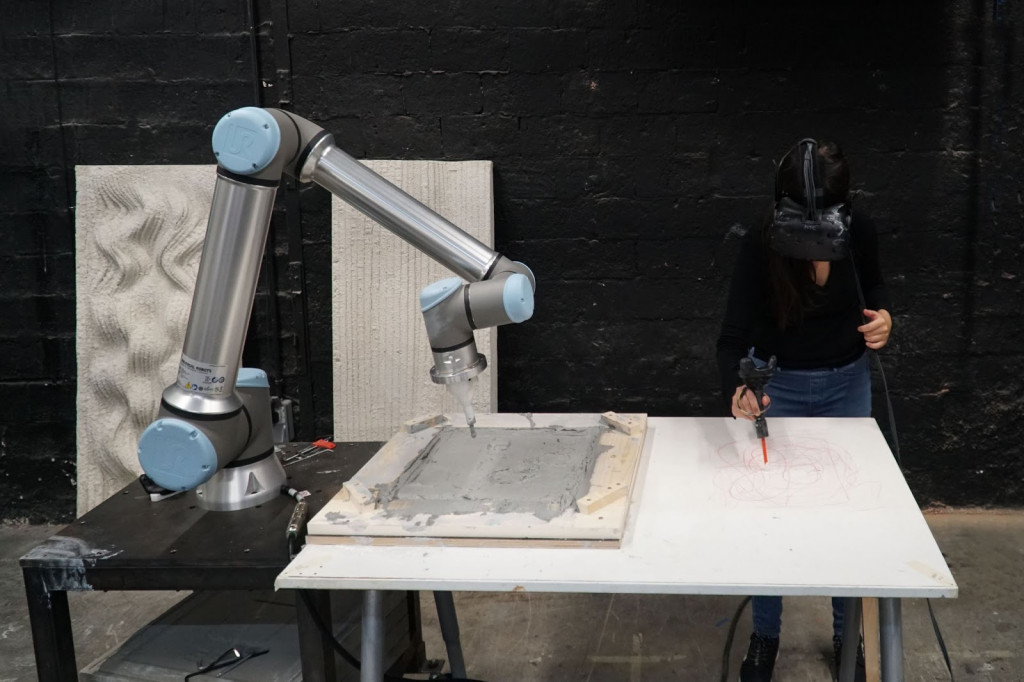
The project challenges to synchronize drawing paths between humans and the robot. Through the HTC suite ( base station, headsets, controller,tracker ), the workspace of a human and the robot can be more flexible and allow the interaction to become more free.
Hardware Used
Universal Robot is regarded as smaller flexible industrial collaborative robot arms ( COBOTS) ,which is intended for direct human robot interaction within a shared space, or where humans and robots are in close proximity.
ROS Application
With the release of UR’s new e-Series, the demand for a ROS driver that supports the new manipulators and the newest ROS releases and paradigms like ROS-control has increased further. The goal of Universal_Robots_ROS_Drivers is to provide a stable and sustainable interface between UR robots and ROS that strongly benefits all parties.
In this project, in order to operate the design in Rhinoceros Grasshopper, we use Rosbridge_suite ( a meta-package containing rosbridge, various front end packages for rosbridge like a WebSocket package, and helper packages ) to transfer real-time data and Plug-in Bengesht to receive the JSON format data.
In this project, we use ROS# ( a set of open source software libraries and tools ) in C# for communicating with ROS from .NET applications, in particular Unity which is a cross-platform game engine and is good at developing interactive interfaces.
Image Above – Drawing dashed lines with Universal Robot 10e. Contribute to the HTC suite for setting the position, all the equipment’s can be moved and interact flexibly.
Interviews
Interview – I – Mr. Imad
1. Why are robots not popular in construction sites?
It is picking up but we still have a way to cover. There is a gap between research and implementation of robots in construction.
2. Safety is an important factor when robots (especially autonomous) have to collaborate with humans. What are the factors that could ensure safety in a construction site?
It’s not only about safety at present but also about efficiency of robots as robots can not be utilized efficiently with too many people working around as it keeps stopping on a construction site.
3. Construction site is a dynamic environment. How can robots fit in this environment? Are small robots more suitable for this environment?
There are a lot of activities which have repetitive tasks, such as façade panel installations, drilling in some situations (have challenges), welding, etc.
4. What is your opinion about ROS? Do you think ROS can be the way to implement Robotics in the Construction Industry?
Not very familiar with ROS. if ROS provides flexibility in easing the automation process and bridges the gap between Hardware and software. It is the solution to many problems in construction automation.
Interview – II
 1. Why are robots not as popular in on site construction as they are in other industries (ex. automobile)?
1. Why are robots not as popular in on site construction as they are in other industries (ex. automobile)?
Construction site environment – dynamic/ unpredictable Nature of robots. Need of more autonomous robots, collaborative robots.
2. What is your opinion on the application of small robots in construction sites? Are smaller or bigger robots more useful in a construction site?
Nature of work to be considered. Site factors, such as scale of project, size, space available, mobility, etc to be considered not only about size. Also about mobility. The smaller the better
3. Construction site is lacking repetitive procedures. Can small robots provide enough flexibility to overcome this problem?
Even if construction lacks repetitive tasks, some tasks are complex repetitive and can be performed by robots. Eg. data collection. Detecting defects, errors.
4. Why is Scaled Robotics using small robots and why specifically a small husky? Why not another type of robot such as quad leg robots?
Mini Husky (Jackal) is used as it is economical. Its best for the talk and load a required sensors. Loading required sensors on spot mini was unsuccessful attempt as it has closed OS.
5. What is your opinion on open source software for robots?
Open source is the best source for robotics in all the aspects such as computer vision, machine learning, drives, sensors, etc.
6. Is Scaled Robotics using open source software? Why yes/no?
Yes. ROS has been used for the robots in collaboration with OpenCV, open source path planners. Most drivers used are open source. Scaled Robotics does not provide parts of their software as open source, but might do it in the future.
7. How does Scaled Robotic use machine learning in the project? Is it used to optimize the exploration path?
At present M.L-Deep Learning is used only on the analysis part (not on robots). Robot is still manually controlled as there is no need for it yet.
8. What is your opinion on ROS (open source robotics software)?
Same opinion as “Question 5”. It’s fantastic. Hugely advantageous. It doesn’t solve all the problems, but links everything together which is really important.
9. Can ROS provide enough flexibility to overcome the problem of non-repetitive procedures in construction sites? Can it help automate some procedures?
ROS does not solve the problem on it own, but it opens possibilities to use other algorithms such as computer vision, mapping, localization,etc.
10. Is human-machine collaboration an important factor for robots to be more popular in the construction sites?
It is a very important requirement. But before collaboration interaction is first requirement as safety, social acceptance are also major driving factors.
11. Can human-machine collaboration be achieved with ROS? What other software (preferably open source) can contribute to achieve human-machine collaboration?
Same answer as “Question 8”. ROS in collaboration with other libraries(Computer vision, etc) depends on the requirements of the specific task.
12. Do you think Scaled Robotics and also general application of small robots will vary from region to region? What are the potential of these technologies in countries with high populations where manpower is cheaper than Implementing a robot for scanning and data collection?
Depends on what is the value robot is providing. E.g. generating point clouds, mapping, etc. can only be done by robots, drones can precisely.
Interview – III
 1. Why are robots not popular in on site construction as they are in other industries (ex. automobile)?
1. Why are robots not popular in on site construction as they are in other industries (ex. automobile)?
Because:
- Uncontrolled environment
- Construction is reluctant to introduce new technology specially robotics.
- Economical factors also hold implementation of robotics in construction.
2. Construction site is a dynamic environment. How can robots fit in this environment? Are small robots more suitable for this environment?
Construction needs small robots due to need agile versatile platform. Smaller is better w.r.t economic point of view, flexibility in movement, etc.
3. Construction sites are lacking repetitive procedures. What tasks could robots be good at in a construction site?
There are many possibilities, each need to be tested and validated. Scanning, lifting heavy loads, hazardous tasks, etc.
4. Eurecat is also involved in the Icarus project that is also working on a dynamic, unpredictable environment. What did you learn from this project about how robots react in an environment like this? Especially when robots have to collaborate with humans. How about safety aspects in Icarus and can it be related to construction?
Icarus, is about using multiple type of robots in disaster situations. Construction field is different from these type of environments because the site is very dynamic. Also safety is not the main aspect of Icarus project.
5. What is your opinion about ROS? What was the way to work on robotics projects before ROS and how did the translation to Ros happen?
ROS is a revolution in field of robotics, it opens lot of opportunities, not only for software engineers but also for researchers and other hobbyist to contribute in robotics field.
6. How can open source and especially ROS How can ROS help us provide enough flexibility for the robots in a construction site? Can it help automate some procedures? Can human-machine collaboration be achieved with ROS?
ROS opens possibilities for implementation of CV, ML, etc. which can help in human machine collaboration.
Conclusion
Cultural and Human factors
The promotion of the level of robotization in the construction site means that all the team needs to promote corresponding abilities. After evaluating the requirement of robotization, the company can introduce ROS into its existing workflow. The ROS has rich tutorials and an active community, so it offers the chance to people who are not robotic experts to ease join the design of robotization. Like Daniel Serrano ( Interview 03 ) mentioned “ROS is a revolution in the field of robotics, it opens a lot of opportunities, not only for software engineers but also for researchers and another hobbyist to contribute in the robotics field. “
Technology Factors
Besides tons of tools and an active community to benefit the robotization in different areas, like Francois Chataigner ( interview 02 ) & Daniel Serrano ( interview 03 ) pointed out “ROS opens possibilities for implementing Computer Vision & Machine Learning which can improve human-machine collaboration” for example, the team in Universitat Politècnica de Catalunya have already use ROS for drone reinforcement learning.
From experience in the project “Real-Time Interactive Clay Engraving Fabrication,” we feel the powerful ability of ROS to integrate with co-robot in a set environment. Though this setup will face many challenges in dynamical constructive sites, this experiment has already showcase smooth collaboration without the gap between humans and robots.
Economical Factors
Like Imad Itani ( Interview 01 ) worried, “There is a gap between research and implementation of robots in construction. The fact is that taking 3 years from research model (working model) to practical implementation on-site (commercial product)is the normal situation “.
Robots need to produce profit for the construction companies to be accepted. Similarly to the pharmaceutical industry, where antibiotics, for example, need to be tested for several years before being released, and only a few of them actually get the approval. As a result, the production of antibiotics decreased dramatically in the past years since they are not profitable for the companies. The same issue arises in the construction industry. A robot needs to be tested to be customized to perform a specific task.
ROS as an open-source robot operating system strongly benefits all parties because its collaborative model shares the pressure of development in different fields. ROS’s important in closing this gap between the development and implementation of robots.
Application of Small scale robotics in construction is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction Applied Theory I/II/III in 2020/2021 by:
Students: Charng Shin Chen, Orestis, Pavlidis, Arpan Mathe
Faculty: Mathilde Marengo