// BRIEF
Our lives are split between physical and digital worlds. The goal of this final project is to represent and combine these two parts and to create a small interactive facade prototype. The facade may react to the environment through sensors and adapt its shape to the external
input conditions, or could be just a facade that changes its design as it would be a living facade.
// CONCEPT
The intent of our project is to create a kinetic facade that change the permeability of the buildings. The facade reacts to people movements through the movement of origami panels. The input of the facade is the live recording of a camera that transforms its input into an interactive kinetic facade.

// FORM FINDING
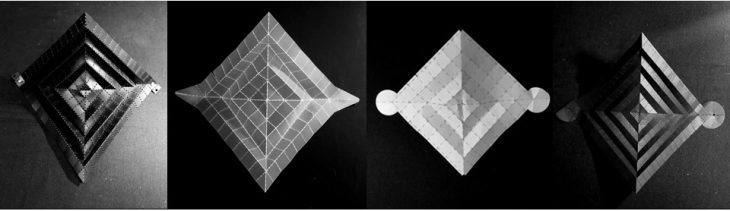
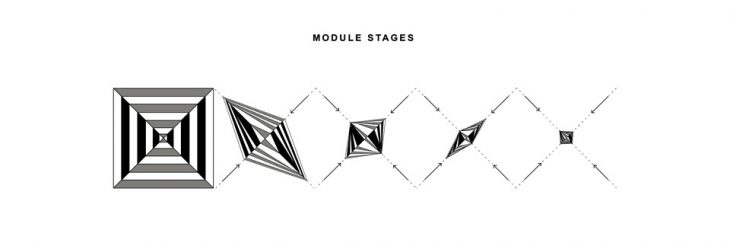
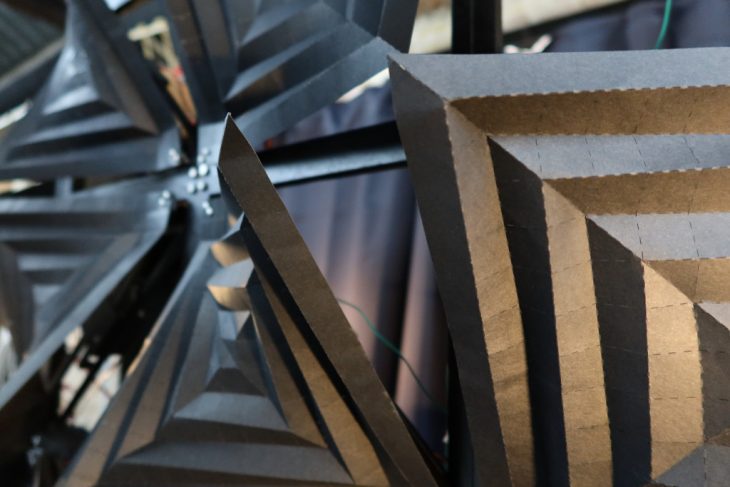
The project explores the performances of the hyperbolic paraboloid origami as a facade panel in motion. This origami is very fast to fold and its movement happens only along one axis.

After testing different thicknesses and materials such as polypropylene and paper, the most suitable solution for the realization of the facade prototype is the black paper 300 g with dimensions 267 x 267 mm.
// DESIGN SKETCH
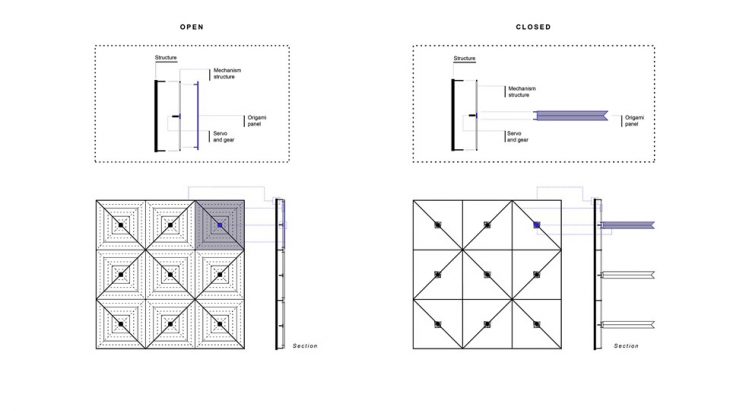
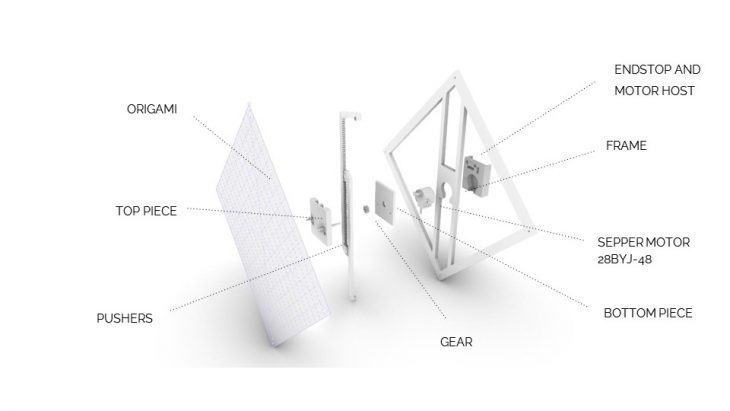
In order to produce the movement of the origami along one axis, it is developed a mechanism composed by one gear and two pushers. The gear is connected to one stepper motor, while the two pushers are connected to two vertexes of the origami panel.
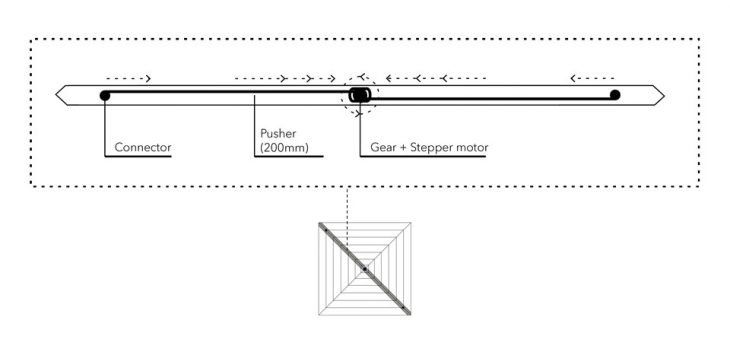
The rotation of the stepper motor controls the opening/closing of the origami panel (the module).
Each module is attached and supported by an extra structure which hosts 9 modules. The orientation of the modules varies without changing any change of the mechanism.
// CIRCULATION DIAGRAM
The project uses one Kinect camera as input. It sends the recorded data to one ESP32 which controls the stepper motors 28BYJ-48 of each module.
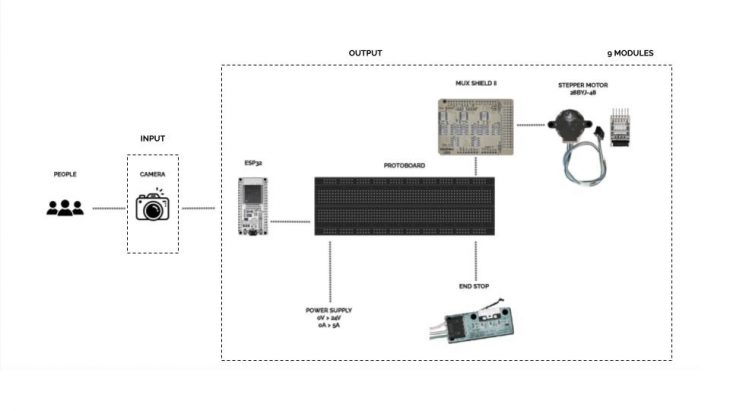
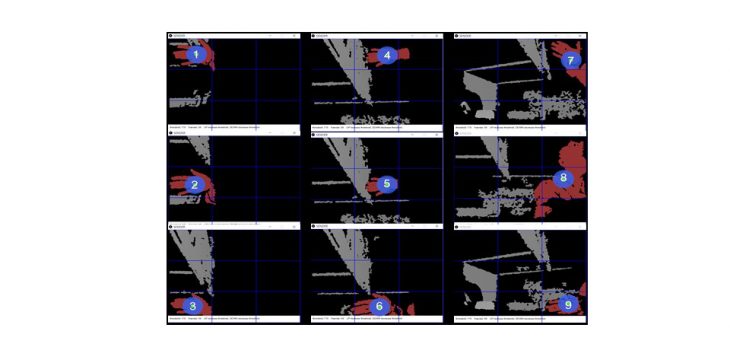
The camera has been divided in 9 frames as well as the whole facade prototype (3×3 modules). When the camera detects a movement in the programmed range of depth values, the stepper motor will start rotating and initiate the origami motion in the corresponding module.
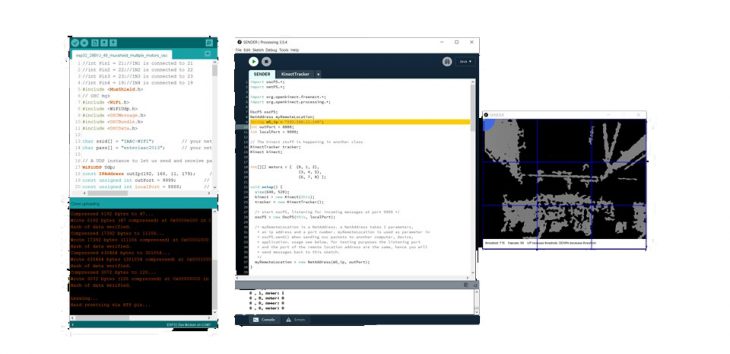
Two codes are necessary in order to connect the camera with the motors: one (withProgramming) is the sender input from the camera, and the other (with Arduino) is the receiver which remaps the depth values from the camera to angle values for the stepper motors.
//FABRICATION + ASSEMBLING
The origami panel is realized with the use of the laser cut machine.

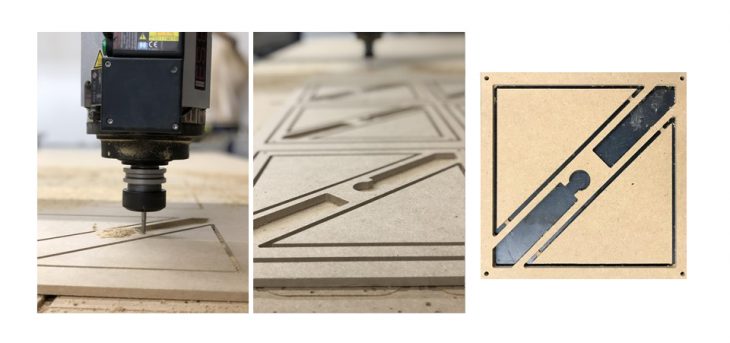
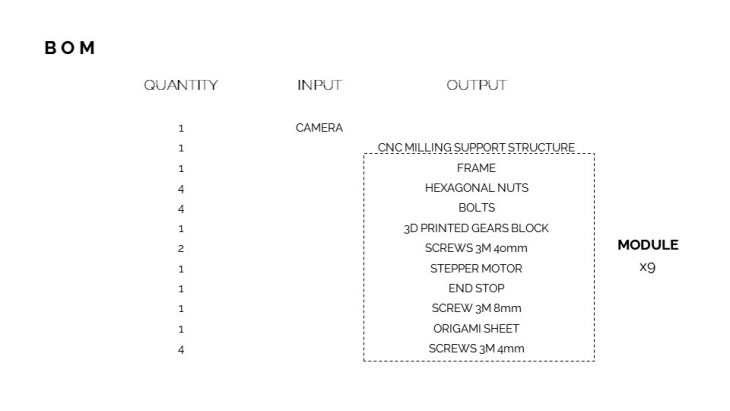
The frame and the structure are realized with the use of the CNC machine. The frame of the module is realized with a 7 mm MDF board, while the structure is realized with a 10 mm board.
The mechanism and other pieces with the function of hosting the electronics are realized with the use of the 3D printer machine.

The module is composed by a frame that carries the stepper motor, the mechanism, the end stop and the origami. The end stop is a necessary electronic which assigns the starting value of the angle of the stepper motor.
The assembling is realized with screws for the electronics and the origami, and with nuts and bolts for the connection between the frame and the structure.
//PROTOTYPE
Once the assembling of each modules is done, the assembling of the final prototype of the facade 3×3 modules lasts few minutes.

// FINAL VIDEO
// CREDITS
Origami Facade // Interactive Systems is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master of Advanced Architecture 2020/21 by Student: Tullio Polisi, Elena Petruzzi, Ziying Zeng, Jose Rigoberto Moreno and Faculty: Angel Muñoz, Cristian Rizzuti
