MiCROBOTS // Hard Ware II
MiCROBOTS is a project by MRAC 01 student Abanoub Nagy Abdou Mickhail during the Hardware II seminar of the Second term. Hardware was taught by IAAC faculty Oscar Gonzalez,Daniil Koshelyuk
During the Hardware II course, students had to explore ::
Using Sensor data , clean and process the data and tun into information and application
ABSTRACT
In this project , is using IMU (Gyroscope and accelerometer) and using its reading after cleaning the data to be used and manipulated in grasshopper as a geometry . Through MQTT protocol between the Microbots and the computer which could be a and using Fire Fly a grasshopper component. Reading from a CSV files.
Introduction
In Construction , ”As Built ” drawings are an essential part of the project . Is a way to document and track many of the changes deviated from the original building plans, that took place during the construction.It is a time consuming process depending the scale of the project.
Concept idea
SO the idea is to create a tool that can help site engineers to give an accurate 3D scanning but not scanning for the already built environment, through the tilted angles . Creating a net of a point cloud around the wall it self . By having 4 microbots attached to the 4 corners of the walls each sensing the tilted angle of its position. By visualizing those data into rhino over the original model, you can see the change happened or by adding a simple script for the original volume for example and the volume of the as built wall. You could get numbers that can help contractor know if they used more materials or less that can help in future budget estimation.
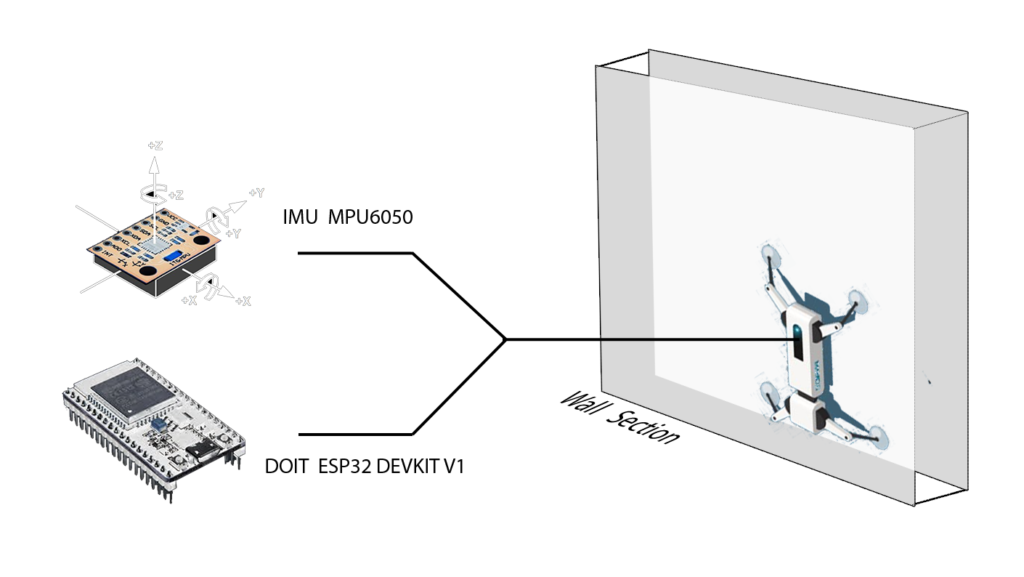
What is Inside ?
The hardware it self consist of an ESp32 board which have a WiFi capability which is needed for the MQTT communication. The other part is IMU (MPU6050) which is a gyroscope and accelerometer, which is the sensor responsible of getting the data or sense the tilted angle.
Communication Methods + MQTT
More about the communication method in this project is through a protocol called MQTT , which consist of central broker connected to other clients.Some clients Publishing and some subscribing to the same channel or a certain topic. As you will see below a functional diagram :
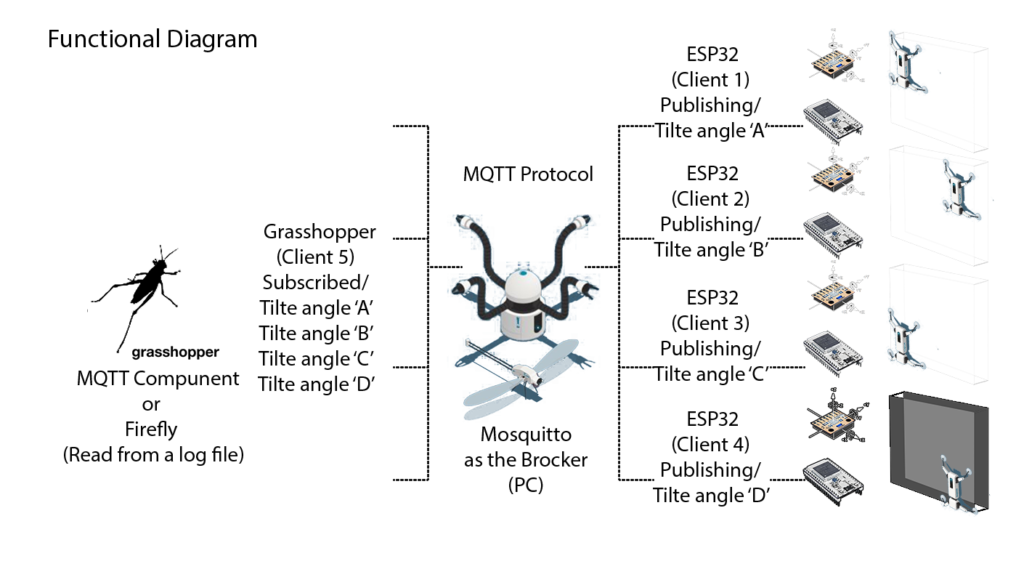
In this diagram , there are 4 units , 4 ESP32 publishing.Each is one client publishing its tilted angle reading to the broker (the mosquitto the PC in this case ) .Then there is the grasshopper which is another client for the mosquitto broker.
In this case there is one optional add one which is saving and reading from CSV log file.So in summary the steps are as following;
- Esp32 publish the reading.
- Broker receiving those data .
- (Optional) save it to CSV log file throng a python script.
- grasshopper Client subscribe reads those data from the CSV that is being updated.
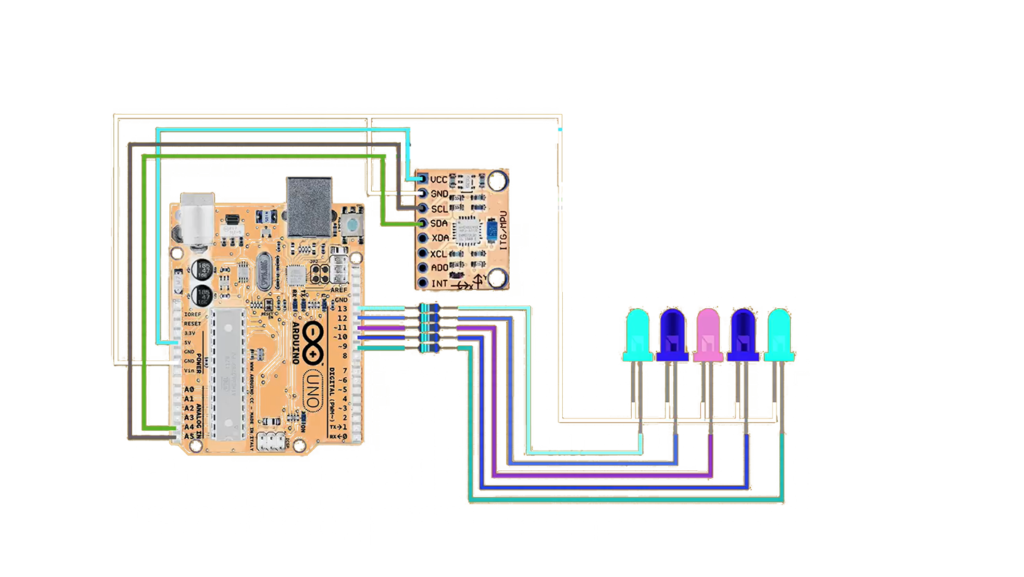
First test + Demo
To get comfortable you need the “hello world” project or simple circuit to start testing the sensor and getting the reading and read them . In this case you have 5 LED each will ligth at a certain tilt of the IMU. The Green will ligth when it is balanced at Zero degree etc..
- Arduino UNO
- MPU6050
- 5 LED Ligths
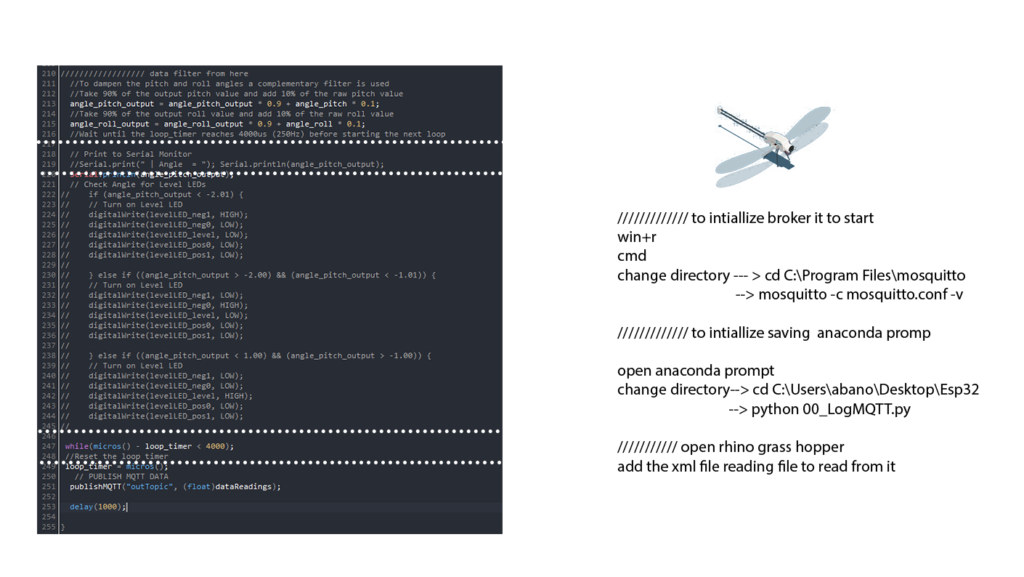
Script
Then Moving to ESP32 . The Script have 3 Major parts:
- WiFi Interface : where you set your wifi and the password
- MQTT Interface : where add IP4 number and it is the part that will publish the cleaned and processed data.
- Cleaning : What ever data or reading from the IMU sensor need some cleaning from some noise for more accuracy and to be used.

Conclusion + Results
What are the further applications
GitHub
https://github.com/AbAgit23/MiCROBOTS
references
