*project developed as part of MRAC Studio III Seminar 2019/2020
d’art is an open ended exploration of translating the knowledge and sensibility of metal craft into intuitive robotic processes. The project challenges “craft” to become a distributed system, where the craftsman’s ability is augmented through remote robotics.
market
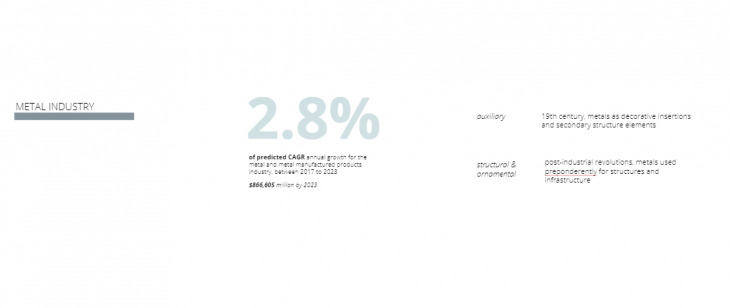
Since 1880s onwards: the development of the metal industry is one of the primary catalysts of the industrial revolutions; initially, metals played an auxiliary role- decorative insertions and secondary structure; later progressing to the development of structural and infrastructure purposes, becoming the fastest growing market in the 19th century. If initially steel and iron were primary metals, in the 20th century, aluminium takes the lead. Currently, the market is growing at 2.8% CAGR annually.
The project focuses around the use of aluminium as a facile replacement for other heavier metals, because it is healthier, emitting less co2 in comparison with other competing metals, it is highly recyclable, with over 70% of all aluminium ever produced still in use and unlike most metals it exhibits natural anti corrosion properties. The demand for the aluminium market is growing by 8.3% per year.

local craftsmanship
With the goal of enhancing the work of a craftsman and enabling local shops to scale up, we observe that currently the operating market of independent shops is limited to the local surroundings, limiting the number of clients or the incoming cash.
The goal of d’art is to allow the small shops to operate on the global market, and to expand their range of products and to increase cashflow, moving towards on-demand, responsibility free production.

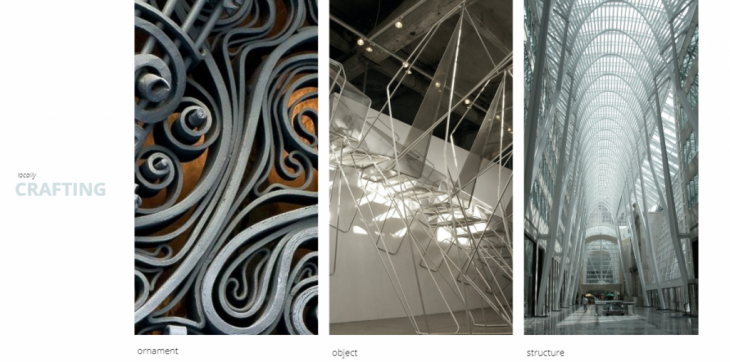
If conventionally, a small shop deals with ornamental work, moving towards medium-sized objects with quite significant financial investments, our goal is to open up the possibility of an independent craftsman to operate multi-scalarily, from ornament, to object and structure.
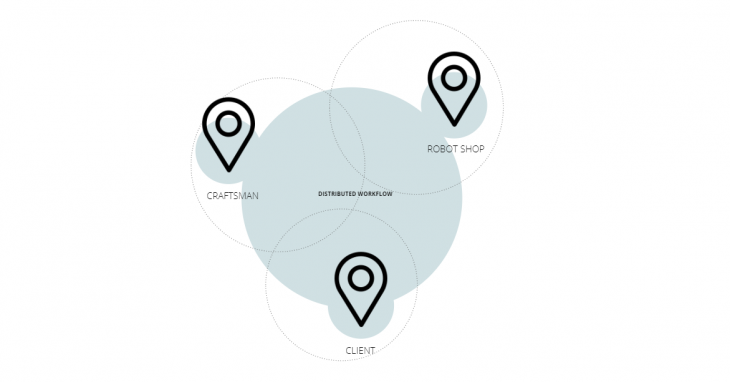
craft locally, fabricate globally
We envision this project under the format of a distributed network, where the client can place an order digitally, the craftsman can receive it, craft a new, unique fabrication process for the specific job and then lastly send the pieces to be fabricated remotely.
The goal is to devise a system irrespective of geographical location and to reduce the amount of money needed for a craftsman to start producing. The craftsman can be operately low-cost and partner-up with a robot shop remotely.
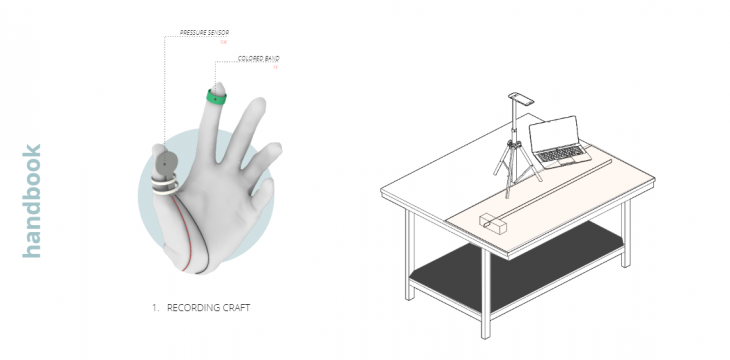
If you are a craftsman, this system is supposed to enable you to start fabricating right away- maybe even with no initial shop setup fees. We wanted this system to be as cheaply source able and as accessible as possible. Therefore, if you are a craftsman and you start being a part of this global distributed network, all you have to do is own a pressure sensor- about 10 euros, a finger rubber band and a quick setup for snapping videos.
tech process
On our side, we take the video from the craftsman and we process it in order to extract robot paths.
First, we use mask rcnn to only segment the metal strip out of the video, then we convert all masked pixels to white and the background to black, getting bitmaps out that we then input into the skeletonization script. In grasshopper, we convert these images to curves and then we optimize the angles to fit our current hardware system constraints.
/ conversion

/ sensing
For sensing, we’re using the aforementioned pressure sensor, connected via firefly and splitting the incoming values both from the craftsman and from the robot into low, medium and high ranges. The point of this is to be able to calibrate the robotic path by remapping the amount of angle exaggerations needed to achieve accurate results depending on how much pressure was detected in the original video.

/ tracking
Hand tracking, performed via using colored rubber bands as descriptors, is developed with the goal of incorporating, at a later stage of the project better accuracy in translating the movement from humans to rigid end effectors. 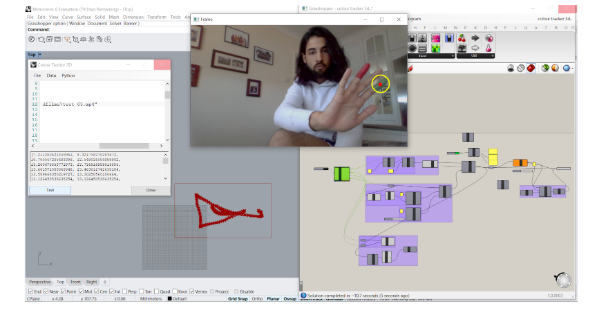

unified system
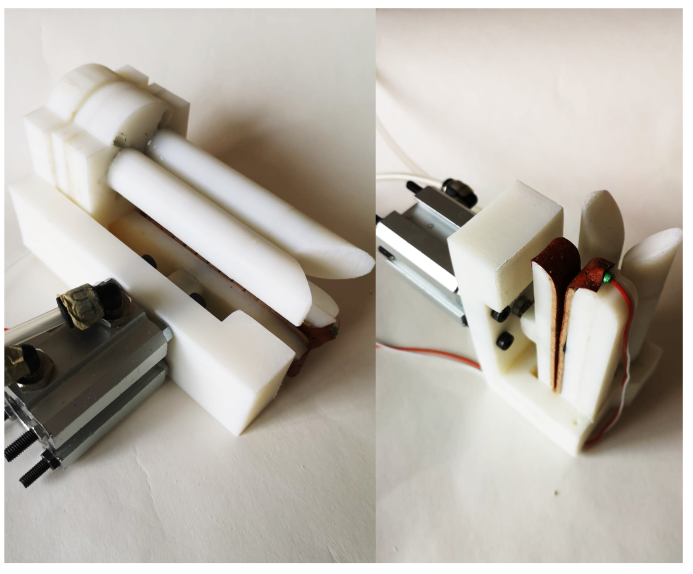
Our three main components- conversion from input video, pressure sensing and hand tracking all collaborate towards the same goal- that of mapping the human gesture and sensibility to the fingers of our end effector. The current hardware prototype we used does have 4 fingers- 2 pneumatically activated, with a very rough on off function and two rounded, for bending. Our goal at this stage is to use the pressure sensor for remapping intensity and the colour tracking to better control which one of the two sets of fingers on the robot is being used.

hardware set-up
Inherited as a legacy from Term 1 Studio project (link here), we had a database of physical experiments both with table set-ups and gripper iterations. These are the versions we chose to work with remotely in testing the current system.
Table set-up:
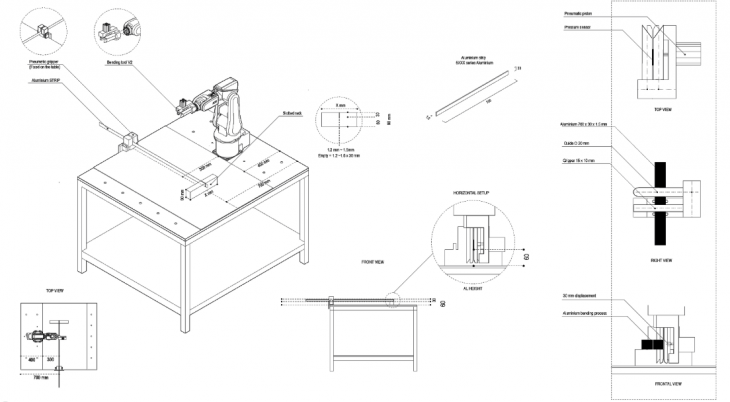
Gripper:
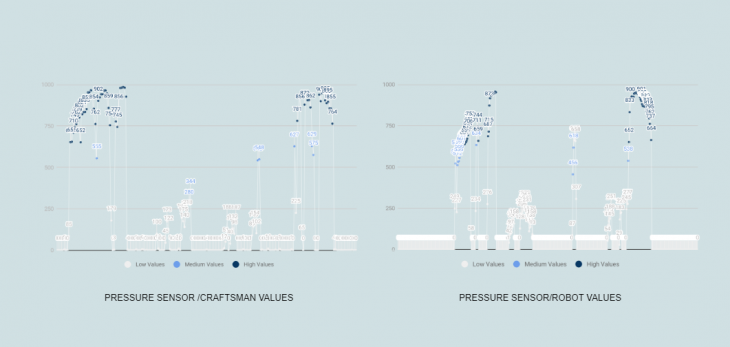
final system
Pressure sensor readings, first recorded by the craftsman fabricating the test piece, second by the robot.
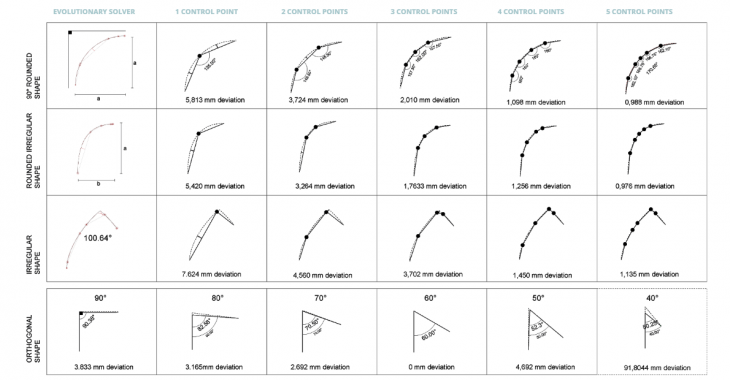
system constraints
With the current physical set-up used, the production process is restricted by a number of constraints.
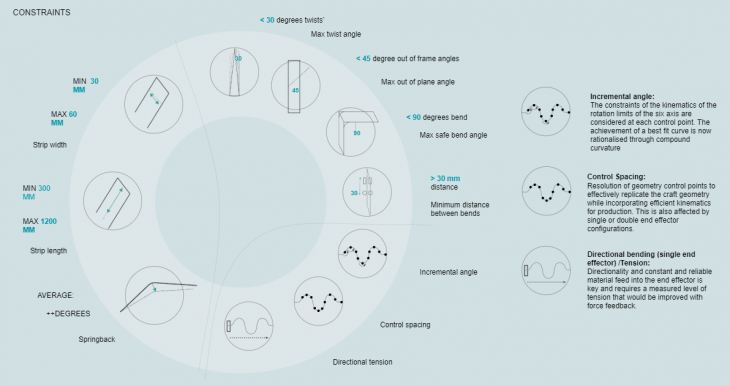
For this purpose, we’ve developed an evolutionary sorting processing system in order to convert input curves extracted from the video received from the craftsman to curves that can be successfully reproduced by the robot.
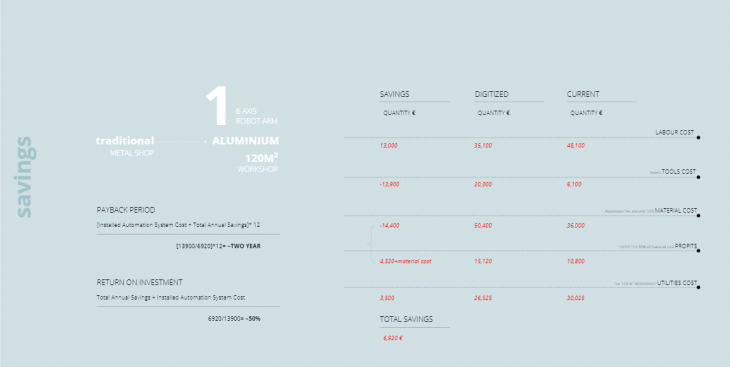
financial case study
Primarily promoting a distributed system, we first look into more traditional ways of becoming digital- the very transition between owning a traditional metal working shop to being a robot-driven shop, and the amortisation of cost and increase in productivity.
Traditional shop:

Digital shop:

Even at the level where a craftsman converts his own shop to become a digital one, in order to be able to approach more complex systems, the increase in profit is at roughly 50% per anum compared to the traditional method.
scaling
However, operating in a distributed network, a craftsman can start producing multi-scalar projects with low to no initial investment. We envision the types of robot shops a craftsman needs to collaborate with and the types of object one can produce for each set-up, from beginner, to intermediate and advanced, where the advanced set-up would allow the craftsman to scale up to mega structures.
Conclusions:
The current project is one version of the multitude of options one can take to tackle the intricate task of converting craft sensibility and technique into resilient, intuitive and collaborative robotic processes. Our track developed under quarantine pressures, pushing us towards wishing to explore ways to democratize robotics, to distribute knowledge cheaply and to develop systems that don’t require much else but one’s laptop and easy-to-find cheap equipment. The intention to distribute, decentralize, democratize and to open technology to the non-expert public, to create inclusive systems and to value the messiness of art and human expression still stands, and we would like this intention to be our iaac legacy.
Andreea, Jun, Abdul & Koura
Final video:
d’art is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in MRAC 2019/20 by Students: Jun Woo Lee, Andreea Bunica, Abdullah Sheikh, Abdelrahman Koura; Faculty: Aldo Sollazzo, Alexandre Dubor