
*project developed as part of MRAC R.1 Studio I: Deep Screens [2019/2020]
Filigree is exploring automated robotic bending systems for mass customization in architecture. Working with aluminium strips, the project is exploring the ability of achieving precise material deformation scaled up to the industrial demand, through developing a robotic process that was then tested in the live fabrication of a 2m x 1m facade module.
The aim of the fabrication system is that of automating the production of custom filigree elements, bridging the gap between design and production through translating the input geometry into fabrication-ready files. With this goal in mind, the research has been dedicated to developing a hardware solution that could accomplish a varied number of potential geometries and later, a software solution to read the geometry data and convert it to cam values to be sent to the robot.
_PROCESS:
The first stage of the project entails developing a hardware solution capable of achieving a variety of geometrical inputs- this translates into building a series of table set-ups for the robot and beginning to materialise with the machine, understanding the behaviour of aluminium and starting to analyse its properties in order to better inform the development of further table set-ups and/or bending tools.
The further set-ups have been tested during the initial experimentation phase:
A. Bending brake + vacuum pick and place end effector
B. Bending table + bending fingers end effector (iteration 01)
C. Table vaacum gripper (material feeding) + bending fingers & feeding vacuum gripper end effector (iteration 02)
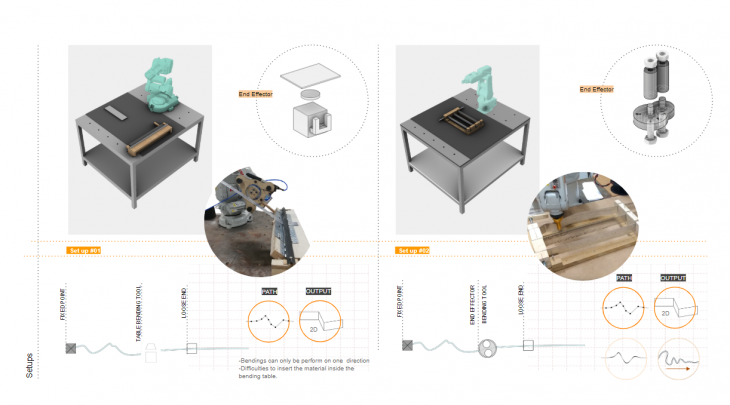
set-ups A-B
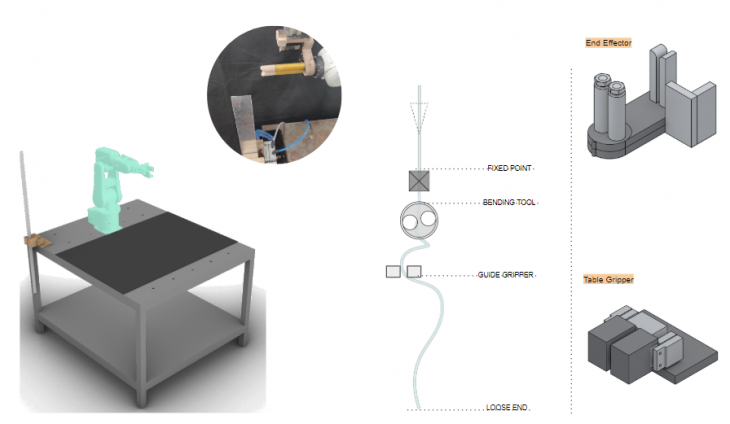
set-up C
After the initial experiments with developing a sequence of end effector bending tools for the ABB 120 robot and achieving only partially accurate output geometries, two main strategies were defined in order to assess the material behaviour, material abilities and precision of the hardware solutions being developed throughout the research:
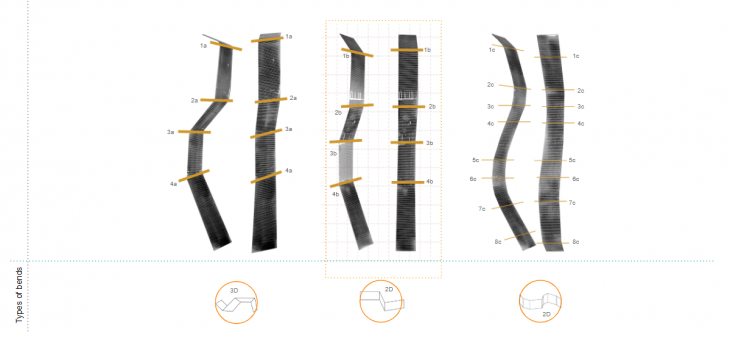
A. Testing continuous bending [ the bending tool is following the control points along a curve, bending as it contours the input geometry]
B. Testing discrete bending [the bending tool is following specified planes and bending motions (twist, angle, pull etc.) that are pre-planned in order to achieve the desired input geometry]
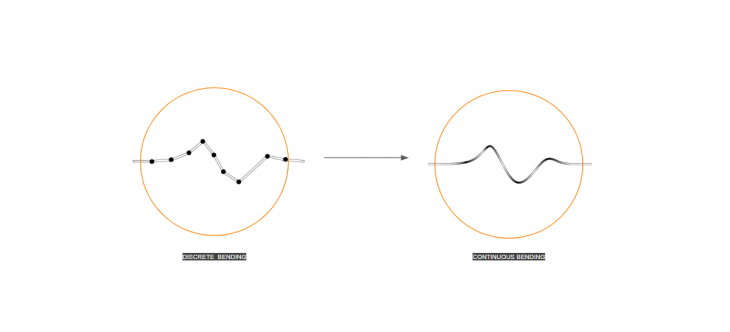 After further experimentation, achieving continuous bends has been ruled out as a strategy, due to material behaviour- this strategy increases the amount of springback, the production time (the operable speed in order to avoid material errors has to be low) and it reduces the extent to which the output geometry is accurate to the input digital geometry.
After further experimentation, achieving continuous bends has been ruled out as a strategy, due to material behaviour- this strategy increases the amount of springback, the production time (the operable speed in order to avoid material errors has to be low) and it reduces the extent to which the output geometry is accurate to the input digital geometry.
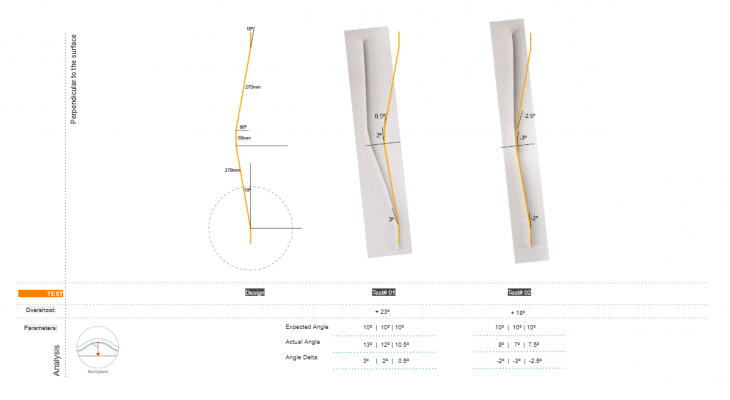
Testing strip bending with this series of different set-ups informed the development of the final set-up used for the purpose of this project through data collection. The data collected falls in the following categories:
- Amount of springback
- Required overshoot angle (in order to compensate for the aluminium springback and achieve accurate bending angles)
- Types of bends & hardware + software limitations for each iteration
- Bending motions compatible with the robot system
Accuracy of bends- input/output comparison:
_SET-UP:
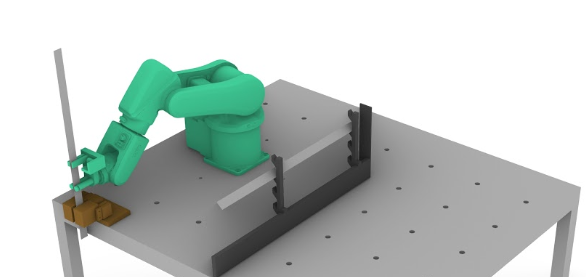
The final set-up at this stage of the research:
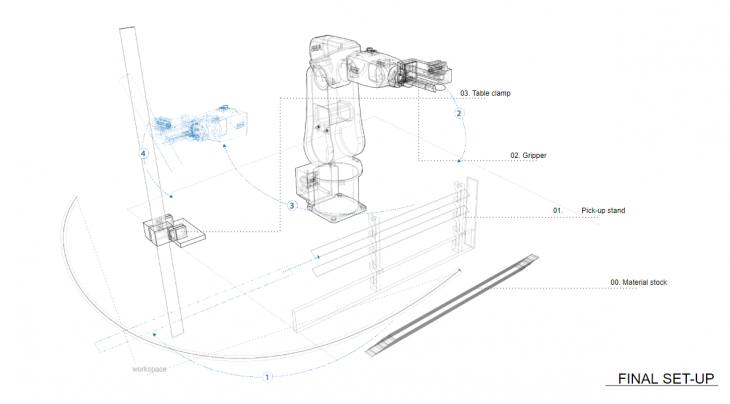 For the final set-up, the aluminium strips are fed manually through the pick-up stand, where the robot is using the on/off vacuum gripper to pick up the strip, place it in the table clamp (vacuum gripper, on/off) at a specified input height- then, the robot performs the first series of bends on the loose section of the strip (between the clamping table point, where the material is fixed, and the loose end in the air). Once the first bends are executed, the end effector gripper is activated (and the table gripper is deactivated) and the robot pulls the aluminium strip in the Z direction, feeding a new section of material to perform the bending process on.
For the final set-up, the aluminium strips are fed manually through the pick-up stand, where the robot is using the on/off vacuum gripper to pick up the strip, place it in the table clamp (vacuum gripper, on/off) at a specified input height- then, the robot performs the first series of bends on the loose section of the strip (between the clamping table point, where the material is fixed, and the loose end in the air). Once the first bends are executed, the end effector gripper is activated (and the table gripper is deactivated) and the robot pulls the aluminium strip in the Z direction, feeding a new section of material to perform the bending process on.
Final set-up:
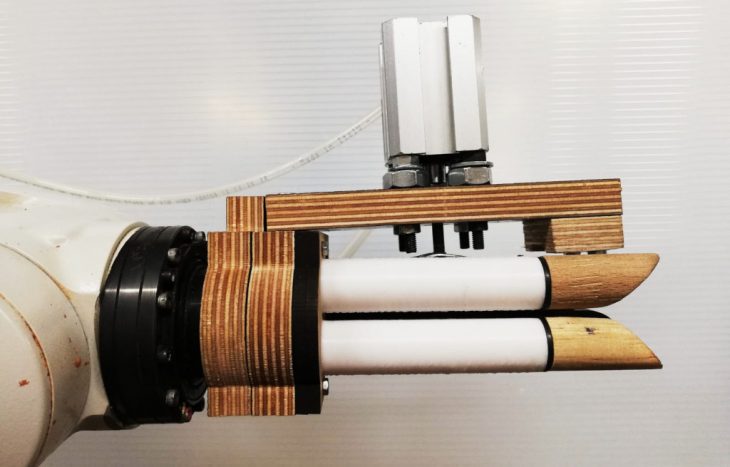
Final tool:
_SYSTEM:
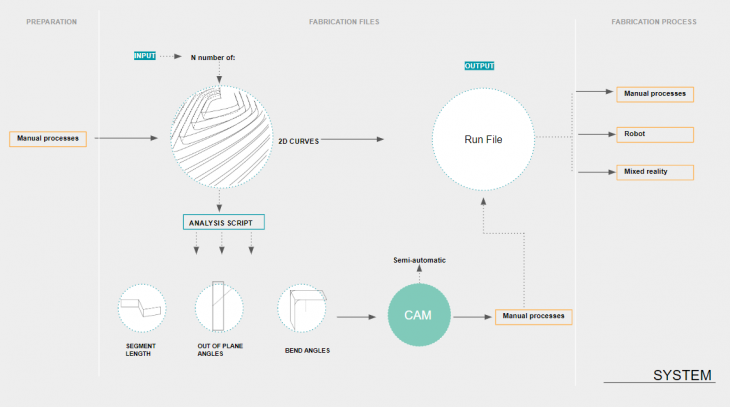
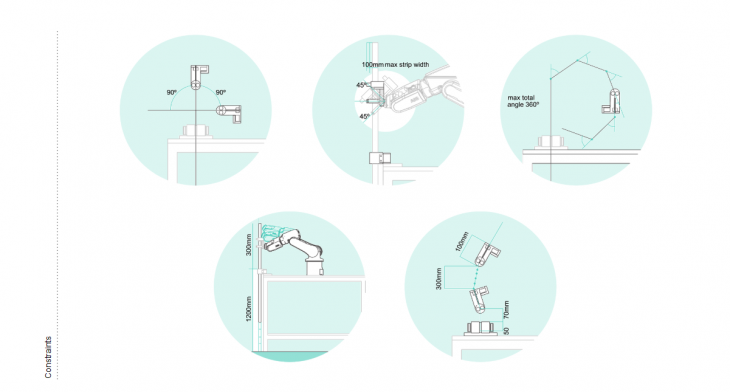
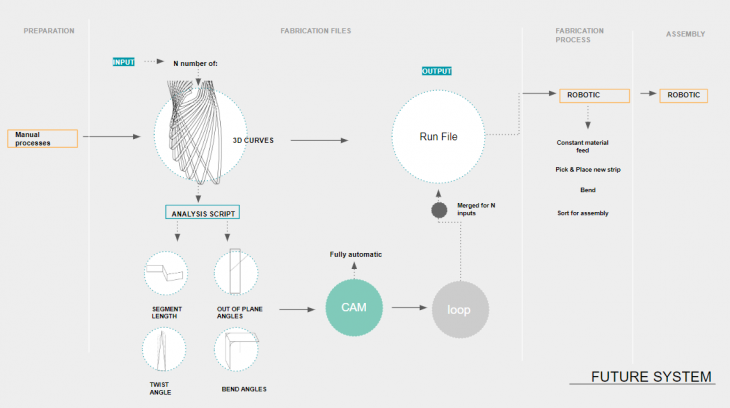
At this current stage of the research, the system can accurately reproduce 2D bends automatically- the system can accept an N number of 2D input curves, that are then passed through an analysis software that returns the required bending angles, out of plane angles and segments lengths, values that are then passed on to the camming software. At this stage, the camming process is perfomed individually for each one of the pieces to be fabricated.
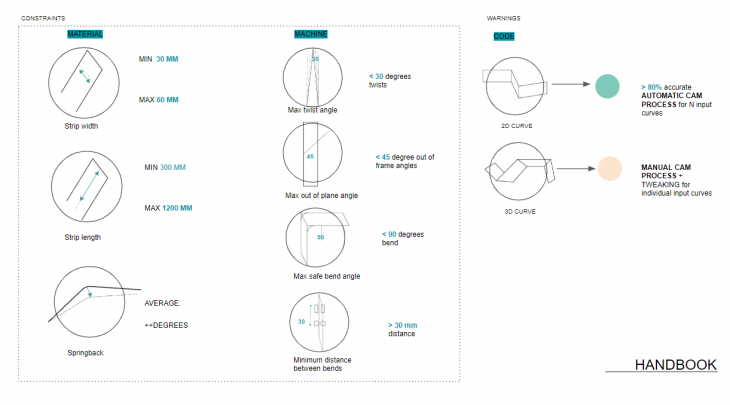
This imposes a series of constraints in regards to the design process, as follows:
_DESIGN:
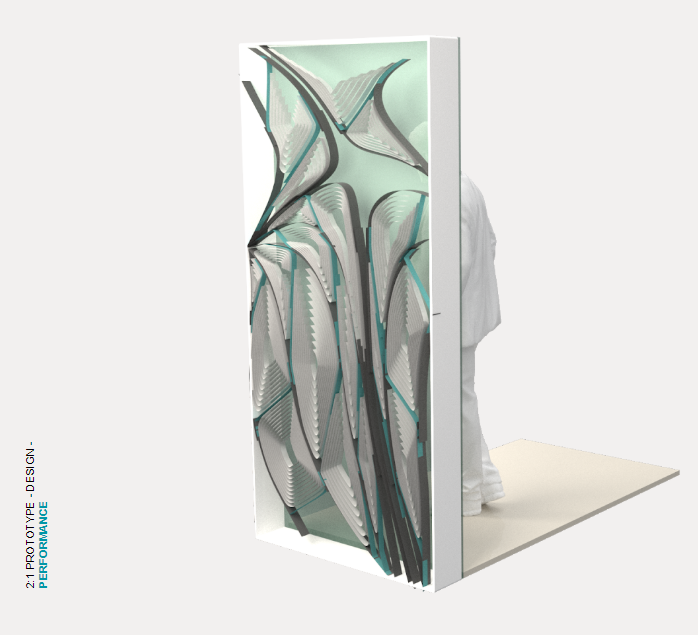
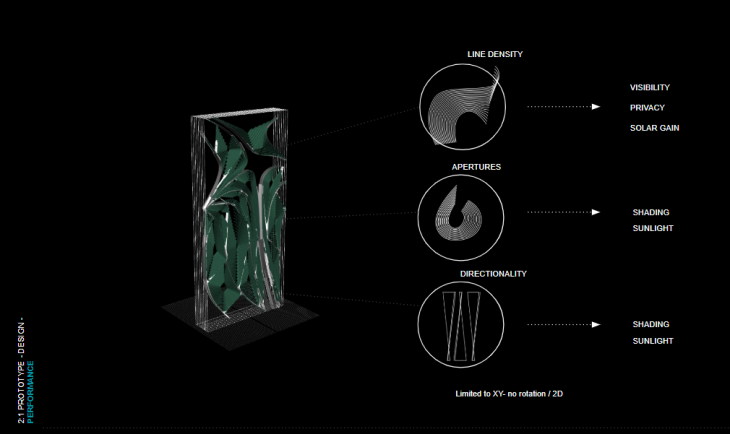
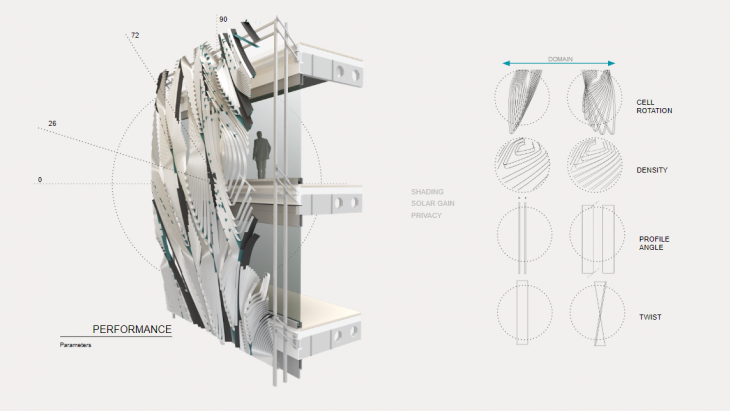
The system in its current stage of development has been tested against the fabrication of a 2m by 1 m facade module, composed of discretised continuous curves, nested parametrically in order to achieve solar performance through strip density, size of apertures and strip directionality.
The panel is composed of three layers:
- Structure strips (divided at a tangent and doubled for strength)
- Bracing strips (cross-strips between the structure layer)
- Cell infill (density curves, varying the performance of the facade in function of solar data)

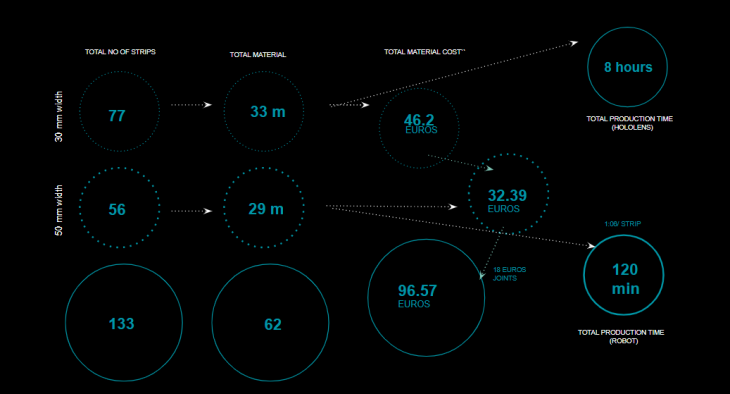
The fabrication process took over two days and it was ultimately split into robotic production and Hololens production for the infill cells, in order to maximize the production time.
Final production video:
_FUTURE PROJECTIONS:
Currently, the system is capable of producing 3D geometries by manually inputting each one of the bendig values in the camming software. In the future, the system can be adapted to automatically read and translate 3D geometries as well.
This development would allow for a more automatised production process, allowing the system to achieve a flow closer to this:
An automated production system of filigree elements could be translated at an architectural scale through geometrical complexity achieved through mass customization of pre-fabricated elements. A future facade proposal entirely fabricated through a system like the one presented could start to achieve morphological and visual complexities.
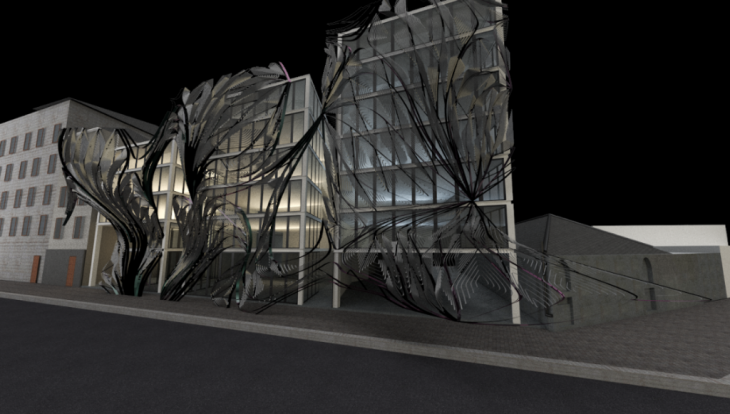
The ability of achieving a more varied gamma of geometrical bends in an automated robotic fabrication system directly translates in an ability of designing more intelligent parametric buildings, that can be informed by a greater number of parameters.
Filigree. is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Masters of Robotics and Advanced Construction in 2019-2020 by:
Students: Abdullah Sheikh, Andreea Bunica, Anna Battale, Matt Gordon
Faculty: Alex Dubor, Raimund Krenmueller