ROBOTIC AND MIXED REALITY
Workshop Context:
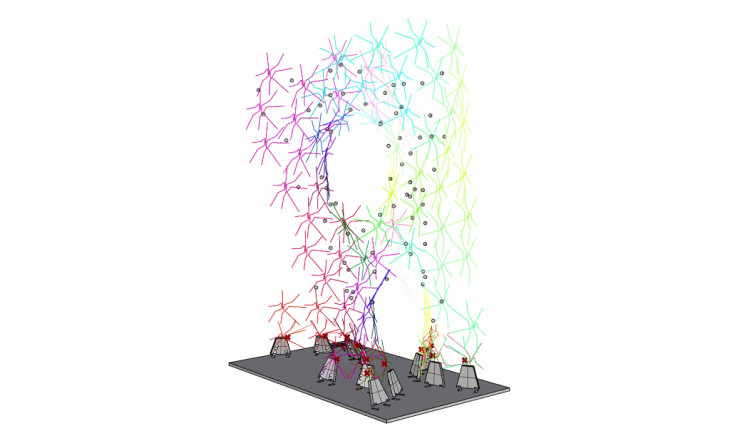
This workshop explored the connection between real-time robotics, augmented reality, reinforcement of structures and self-organizing structures based on the agent-based design algorithm. In addition to that, the output of this workshop was generated and built by agent-body structure, out of 3d-printed polymer, and assembled by using Hololens.



Team Responsibilities:
Due to the complexity of the process, the class was divided into 4 teams as a design, reinforcement, fabrication and real-time feedback.
Fabrication team was in charge of the fabrication team was to print the generated structure pieces (at the end 80 different pieces) consideringly the parameter of extrusion temperature, extruder Screw-speed, and the robot printing speed.
Assembly team was tasked with to come up with a technique to attach the AR markers to each of the components in a similar fashion. So that each component can be referenced in the 3D model in the correct position and orientation as the actual structure in the physical world using the HoloLens. Through this process, augmented construction reality, each individual component was physically selected and assembled. Resulting from these physical changes, the computational form constantly evolved and adapted due to real-time feedback.



Challenges:
- The first challenge at the beginning was to understand how to put AR markers on the printed pieces. How can we align the AR Marker for the orientation of each piece?
Solution: In the end, we aligned the corner of Ar marker with the inner corner of each piece. Because of only inner corner didn’t change from pieces to pieces.
- The second challenge for the assembly part was using Hololens. When only one person wore the hololens, it became impossible for the rest of the team to visualize the structure and assemble as teamwork.
Solution: As an alternate visualization method that allowed for the entire team to see the orientation and location of the component, to communicate the position of the component and space and how to fix it.
- The third challenge that we faced as an assembly team was that the plastic components were either too brittle but strong or too elastic but weak.
Solution: During the fabrication process printing and assembling team worked together to find optimum layer thickness and width to suitable for the assembly process.


Next Steps:
The error accumulating in the assembly could be tackled by integrating real-time feedback using the HoloLens of what is actually built with reference to the original model.
For the Hololens Software, Interactive process solution can be developed around the technology. When we try to place the object on the space (based on Hololens visualization) only one piece should be highlighted to find rotation and location. During the process of moving pieces by hand, when piece A is located on the exact position, the piece A should change the color on the Hololens visualization to avoid of 1-2 cm error for each piece.
Workshop 3A | MRAC 2018-2019
Faculty: Roland Snooks
Faculty assistants: Natalie Alima | Kunaljit Chadha
Student: Hazal Yilmaz
