 The aim of this project is the creation of a performative system which reacts and responds to different environmental and climate changes. What we are looking for is a structure which adapts to the users’ needs and through its responsiveness it creates a space with optimal environmental conditions. The smart material which is incorporated to this study is the Shape Memory Polymer (Veritex) which has the ability to remember and recover to its initial position after its deformation.
The aim of this project is the creation of a performative system which reacts and responds to different environmental and climate changes. What we are looking for is a structure which adapts to the users’ needs and through its responsiveness it creates a space with optimal environmental conditions. The smart material which is incorporated to this study is the Shape Memory Polymer (Veritex) which has the ability to remember and recover to its initial position after its deformation.
|| Strustures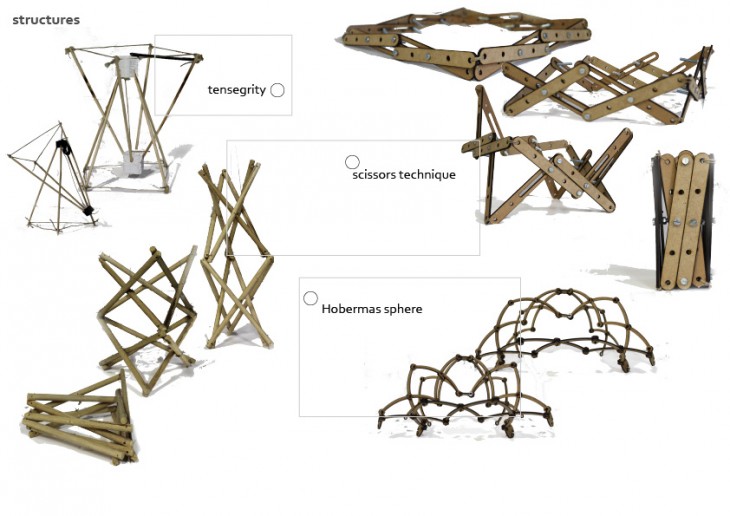
Lightweight transformable structures have one degree of freedom (the control of mechanism eliminates to one variable) which enables an internal propagation of movement from one component to another.
Because they follow a sequence of states, they are changing physically in a continuous process, while they are providing indeterminate physical solutions.
|| Shape Memory Polymer composite (Veritex)
As mentioned before, this project incorporates smart materials considering them as the key factor in reaction to stimuli. The inheritance of the Shape Memory Polymer (SMP) composite allows the structure to be dynamic.
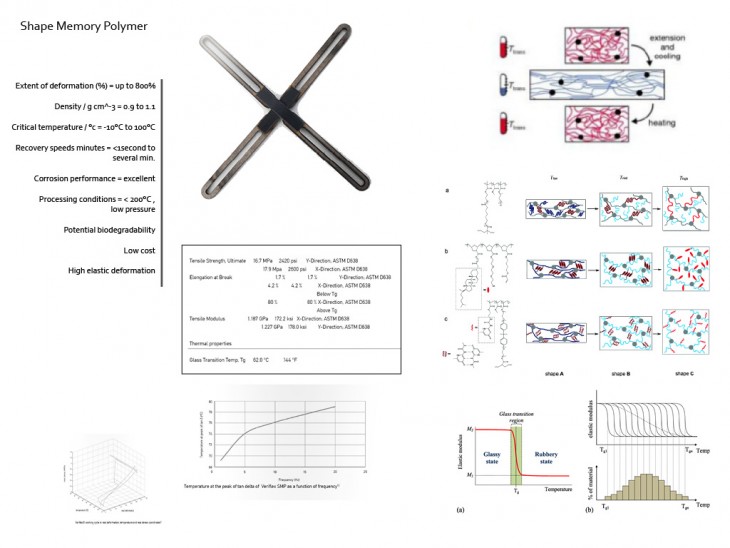
Properties of SMPcomposite (Veritex):
- | shape memory properties
- | strengthening fabric reinforcement (because it is already a composite)
- | transforms from rigid composite to soft elastomer
- | deforms and recovers shape repeatedly (actuation through heat)
- | up to 80% elongation in elastic state
- | durable
After several experiments, the SMPcomposite presented us its mechanical properties: It can’t initiate a movement against gravity, but it works when the direction of the same structure changes. More, it can pull but not push any weight. As a result, the SMPcomposite although it retains a state, it is unable to carry weight.

Because SMPcomposite reacts to any source of heat, we chose electricity to be the actuator in this case. Nichrome wires are rolled around the SMP and through electricity (4V-11V) we achieve the necessary flexibility for deformation of the material.
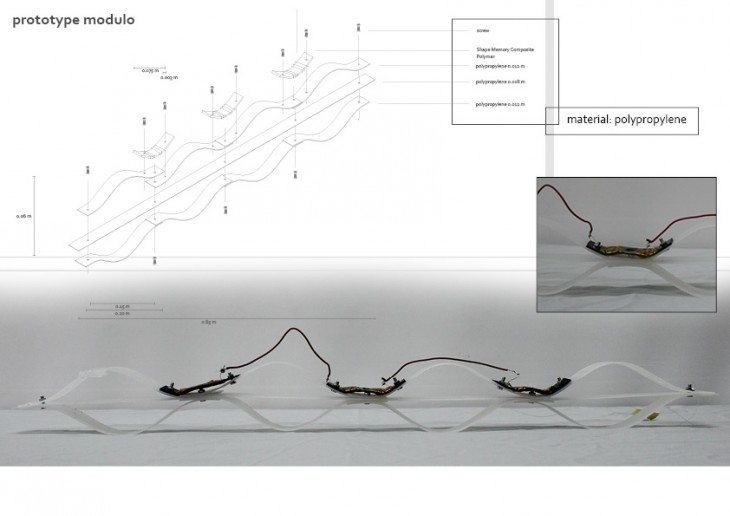
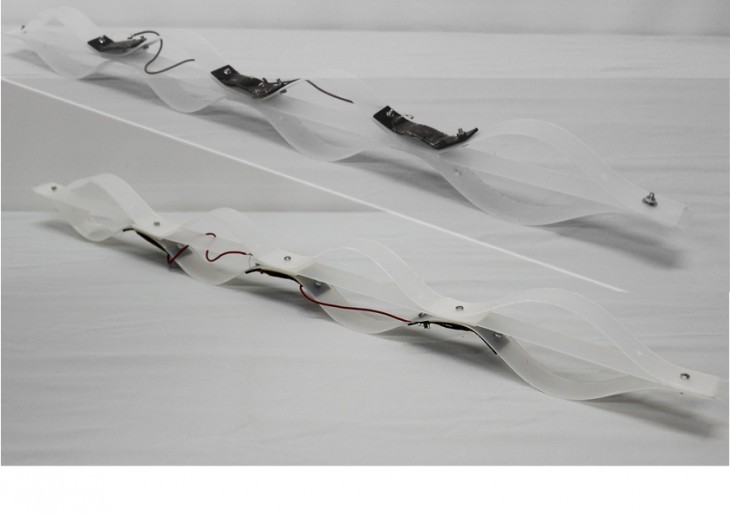
|| Prototype
The prototype modulo of this project consists of a stripe connecting several modulos. The SMPcomposite is placed on the connecting nodes, allowing separate movement of the modulos. The SMPcomposite is heated through nichrome wires while the initial deformation is by human gestures.
material: polypropylene stripes 0.8mm, 1.2 mm
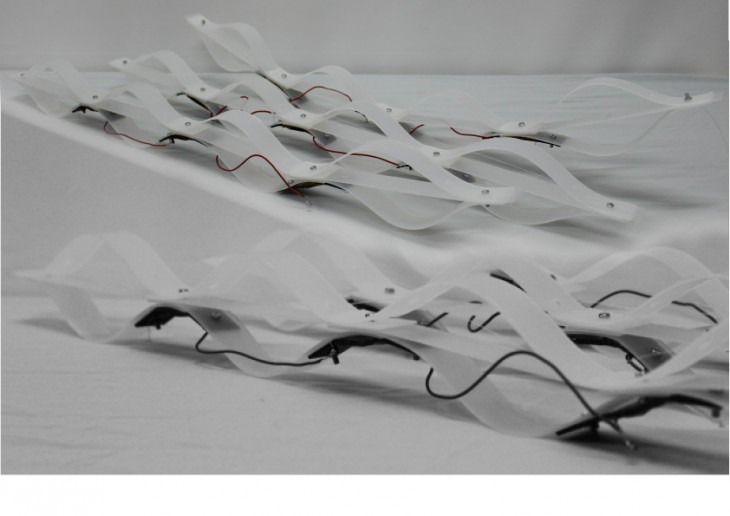
As the purpose of this project is to create a structure, this prototype is multiplied in parallel direction, creating a surface. The next step is to test the behavior of this surface and make possible that every rib of modulos and every node can be controlled separately.
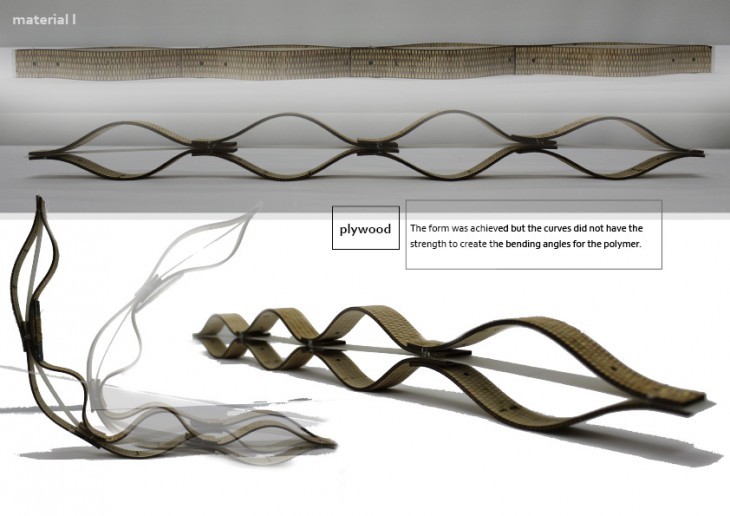
In between, different materials were being tested in order to better understand the behavior of the prototype and see how materials could change, improve, create or eliminate any system failures.
~material: plywood (bending technique) 3mm and polypropylene stripe 0.8 mm
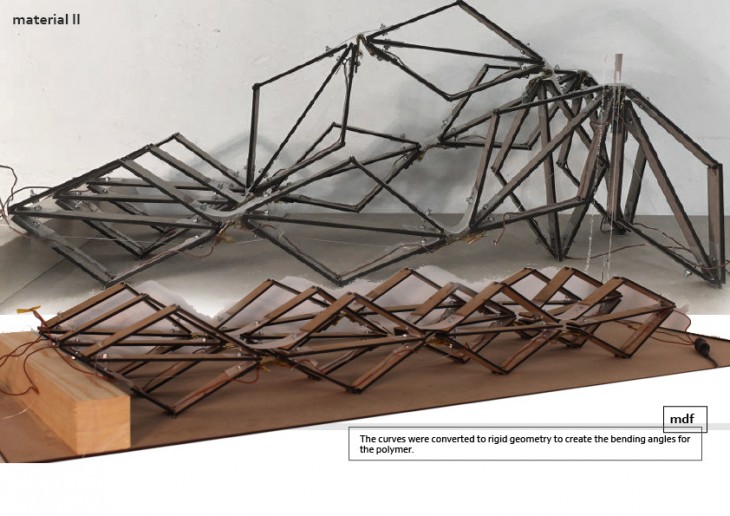
 ~material: mdf 4mm
~material: mdf 4mm
|| simulations
First experiments by creating different matrix and combination of movements to visualise the final outcome
[Response_able] is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Advanced Architecture 01 in Digital Matter – Intelligent Constructions Research Line in 2015-2016 by:
Students: Nikolaos Argyros, Maria-Klairi Chartsia, Sameera Chukkapalli, Jakub Havlik
Faculty: Areti Markopoulou, assistants: Alexandre Dubor, Angelos Chronis
