Walls test remote robotic assembly
This experience was done using grasshopper parametric design in several parts of Europe and sending them for remote assembly to Aachen in Germany.
Remote wall assembly was a challenging task, for this we started having in mind different shape proposals to test. Started with two different options: spiral wall a and wave wall with a brick model already uploaded in the file.
Comparing the performance of both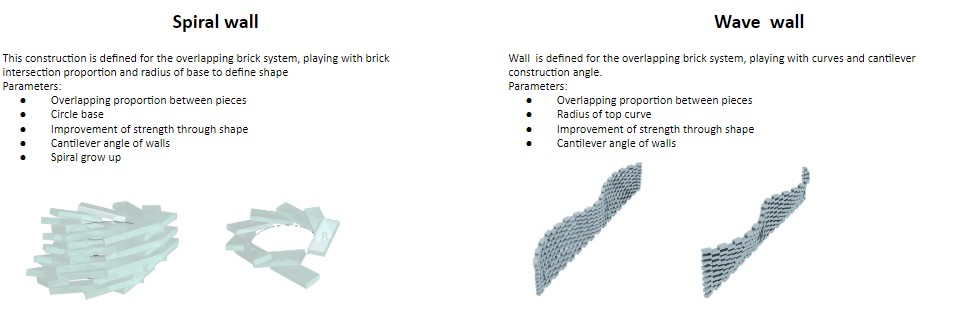
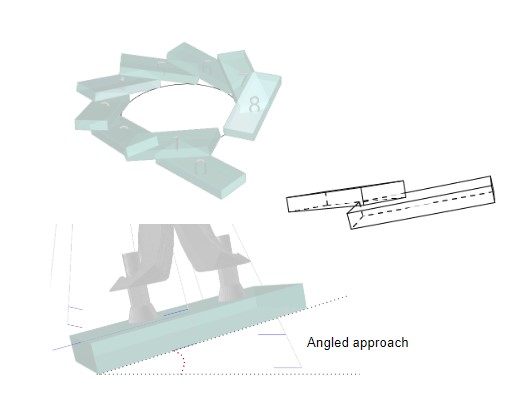
For spiral wall stablished assembly rules for stacking and growing up Define robot approach to pieces and simulate the assembly process and the angle for picking up
Define robot approach to pieces and simulate the assembly process and the angle for picking up
The same analysis was done with wave wall. Geometrical and constructive rules were defined using a straight line in the base and a curve defined by 3 circles on top. This geometry defined a cantilever angle that we needed to test to understand how far we could push geometry before collapsed.
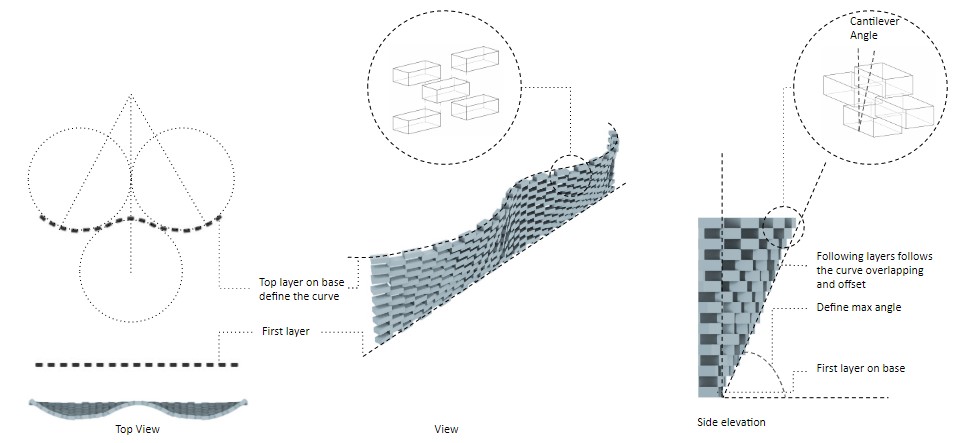
Structural analysis for wave wall to understand limit of overlapping ration between bricks before collapse
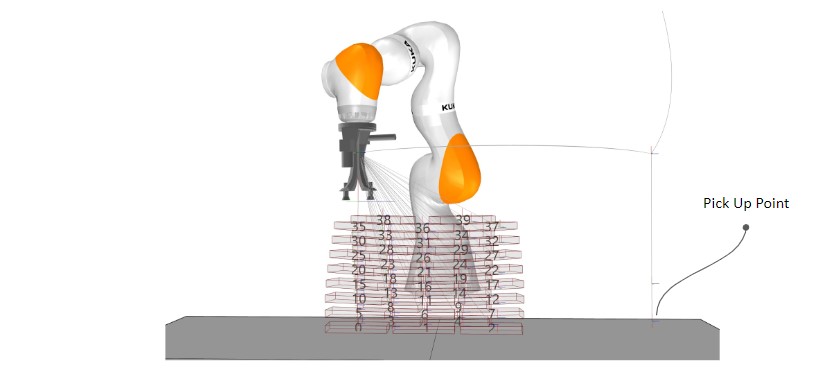
Simulation of construction to verify robotic arm position from picking point to final deployment creating a sequence for assembly
 Body rigid test to verify when the structure could collapse after put it under certain effort
Body rigid test to verify when the structure could collapse after put it under certain effort
This experience was carried from multiple locations: faculties were at Barcelona (Spain) and Aachen (Germany). Student were spread in different parts of Europe (UK, Spain and Romania )
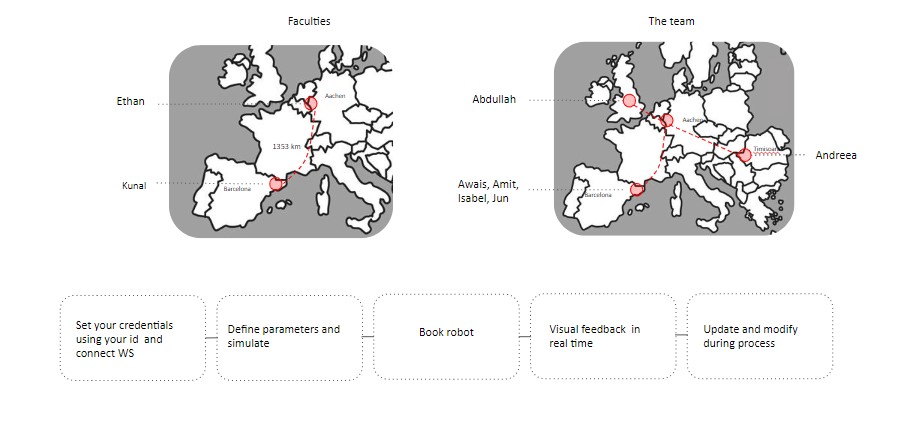 After running the simulation, we started the remote assembly test For this procedure we needed to set our credentials using an ID to connect to websocket. When we were connected, we needed to book the robot. Then connect with the webpage of Aachen lab where a camera w attached to the robot showed us in real time how the robot was moving. Also another frontal camera allowed us to control the assembly process remotely.
After running the simulation, we started the remote assembly test For this procedure we needed to set our credentials using an ID to connect to websocket. When we were connected, we needed to book the robot. Then connect with the webpage of Aachen lab where a camera w attached to the robot showed us in real time how the robot was moving. Also another frontal camera allowed us to control the assembly process remotely.
We started with few test of spiral wall , some of them failed
After these test, we runned the wave wall test
Image of the final result for wave wall test

Students: Mansoor Awais, Jun Woo, Andreea Bunica, Amit Pattar, Abdullah Sheik, Isabel Cousseau
IAAC – Master in Robotics and Advanced Construction
Workshop 3.2
Tutor: Ethan Kerber / Chair for Individualized Production, RWTH Aachen University
Tutor’s Assistant: Kunaljit Chadha / IAAC
University collaborators: Chair for Individualized Production RWTH Aachen University and Robots in Architecture Research LLC
The workshop was an initial beta test of KUKA|crc (Cloud Remote Control) software development by Sven Stumm / Robots in Architecture Research LLC.