THE DRAWING BOT // R.3 STUDIO
. Scope & Context of the Drawing Bot
The line is the most powerful creative tool that architects have. The line is the mediator between the physical and the digital.
The line it is the first trace of what will be a transformation in a new space. 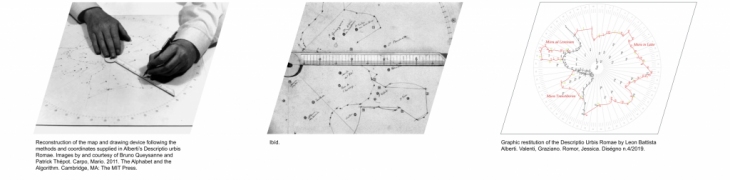
Conversant as he was with the sadly corrupted remains of classical literature, Alberti knew all too well that the manuscript transmission of texts and images was a risky operation. Copyists make mistakes, sometimes they interpret, sometimes they interpolate, sometimes they invent. But Alberti also knew, as everyone did since classical antiquity, that the risk of copying affected the transmission of text and images in a markedly asymmetrical way: alphabetical texts, and numbers, were known to travel across space and time faster and more safely than pictures. (Carpo, M., The alphabet and the algorithm , 53)

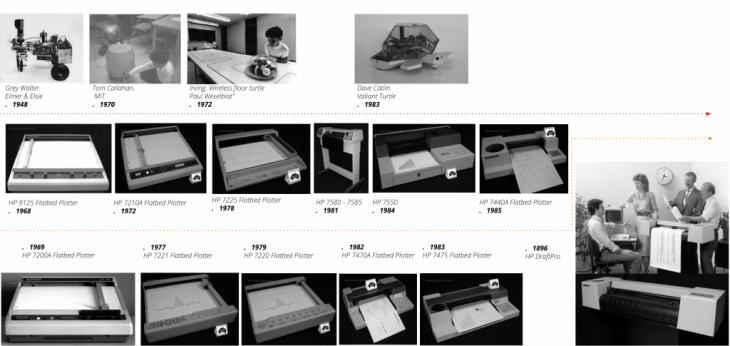
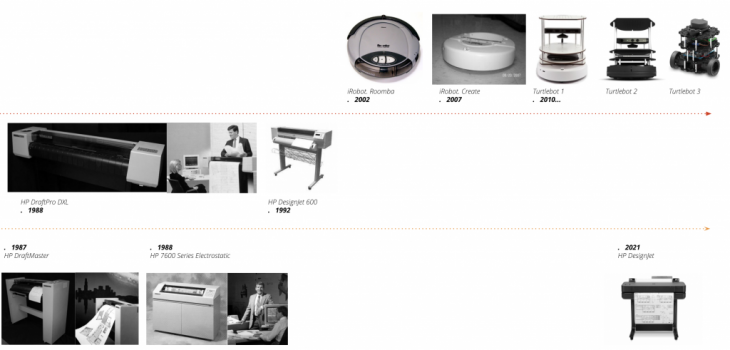
In the middle of the 20th century, the massive development of printers allowed them to gradually become common and ordinary devices, which at first began occupying a large part of a room and are now one more peripheral that accompanies any computer and work.
In the same period, the first turtle robot was developed. The turtle is an autonomous robot that moves thanks to a series of simple instructions based on distances, angles and directions.
Instructions, drawings and printers are a fundamental part of the creative work of architects, the plotter and the large format is what allows the generation of plans that are taken to the field and thus it is possible to indicate at a scale and through drawing conventions the steps to follow to carry out the construction of an architecture project. 
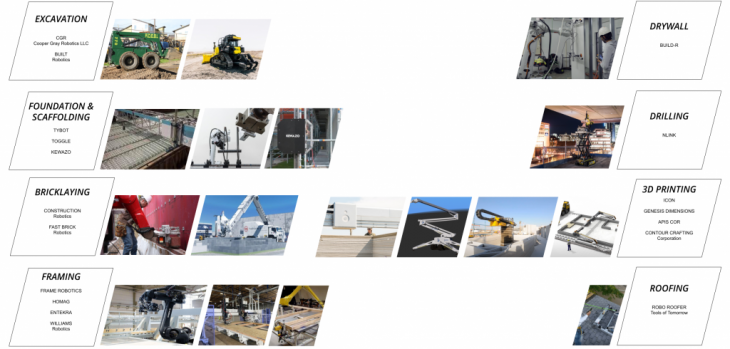

Currently on the market, there are more than 50 startups related to automation technology and the use of robots in the industry like: excavation, fundation & scaffolding, bricklaying, framing, drywall, drilling, 3d printing, roofing, painting, prefab, data capture, surveying & layout, materials handling and prep.
With these categories in mind, our current prototype works on improving the design stage and also the scanning, layout and surveying construction.
. Minimum Viable Prototype
Drawing and turtlebots present a great opportunity to develop and change the way a two-dimensional representation can modify a space. In other words, we now have the possibility of making a new way of designing in architecture accessible, generating drawings on a medium other than paper and thus eliminating the constant transfer that has to be made between the plan and the terrain. With this technology we will allow architects to design, interact and analyze space with our drawings.
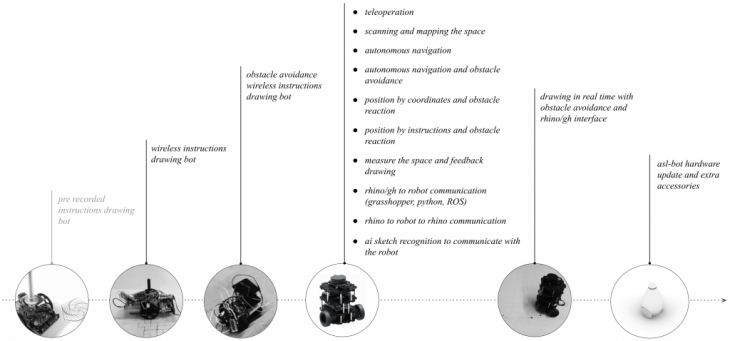
Our project is in a development stage in which we have been able to analyze and answer various questions related to technical, hardware and software aspects.
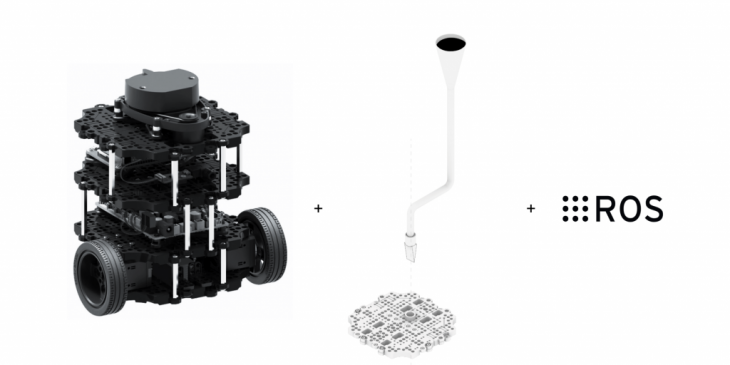
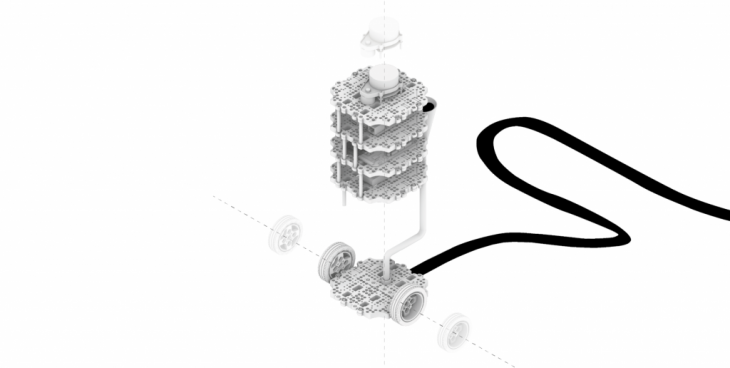
Our first robot has a system for transferring data and transforming images into instructions for drawing. The second robot is a version that improves the motor system and adds sensors that allow movement control that respond to the environment. We are currently working with the Turtlebot3 in order to bring obstacle detection and even machine vision into our prototype.
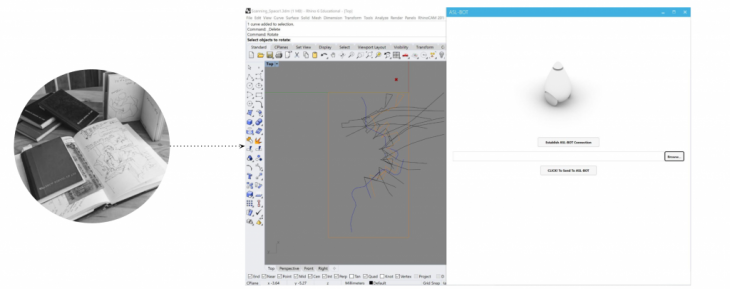
The first successful tests looked like this:
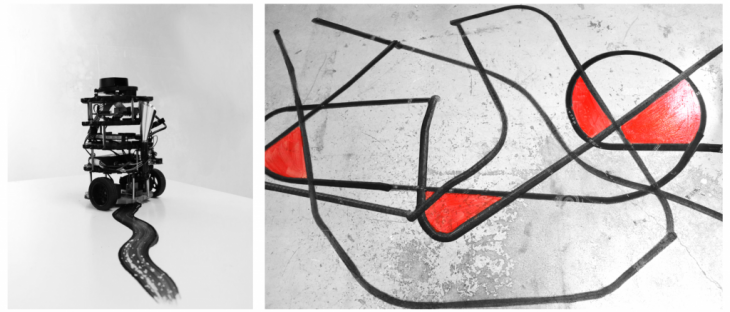
. Application 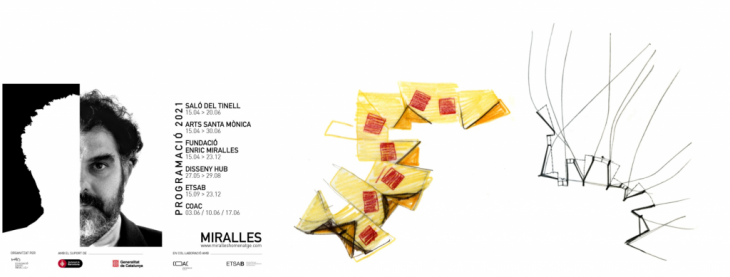
The case study that we present below has been an opportunity to be part of the 20th anniversary of the death of Enric Miralles. With the drawing in the main hall we want to show how powerful it can be for us architects to visualize a preliminary design beyond our notebook and computer. The drawing is part of the space, in a real size and thanks to the technology we have available we can interact, receive feedback from sensors, etc.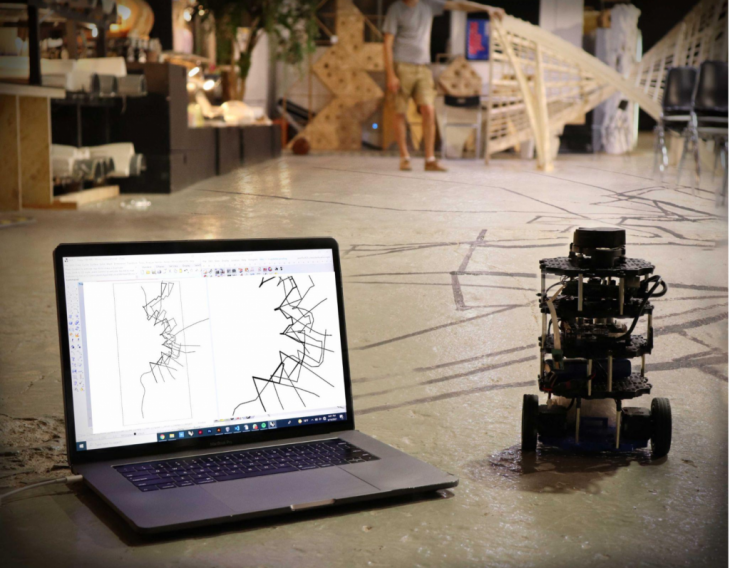


. Next Steps
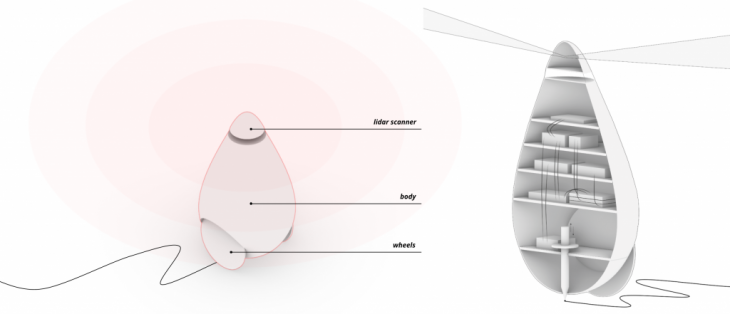
Future designs of the drawing bot would first focus on hardware upgrades. The all new Asl-Bot would grow in size and have more room to incorporate the automation of the end effector. It would allow for several sizes of tools to be added as well. A smoother covered body would help the Asl-Bot maintain its balance and larger wheels would adapt better to the imperfect indoor floors.
The battery life would need to be improved as well to last several hours instead of half hours and the possibillity to plug in another replacement without having to turn off the bot would be implemented. This would not break the connection through ROS and force the user to start a new session from scratch and run everything again.

With an upgraded model of the drawing bot, the precision of the markings on the ground would increase and the user would then be able to imagine where the walls or partitions or dividers [or any element] would ‘extrude’ into real life. The drawing at 1 : 1 would already create the architectural space and facilitate the construction and building process.
Eventually, a team of Asl-Bots could even work together in the same space to draw simultaneously. The autonomous navigation and obstacle detection of the robots would allow for a human / robot smooth workflow that would be time efficient as well as cost effective.

Credits
The Drawing Bot // R.3 Studio is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at the Master in Robotics and Advanced Construction in 2020/21 by:
Students: Helena Homsi, Juan E. Ojeda, Aslinur Taskin
Faculty: Alexandre Dubor, Aldo Sollazzo
Faculty Assistant: Antoine Jaunard, Ashkan Foroughi, Soroush Garivani