
Design Inspiration
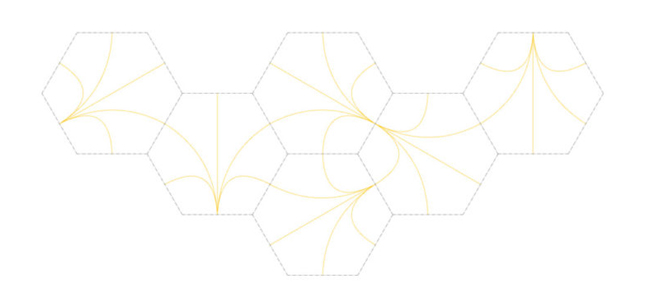
Inspired by nature patterns and connections in nature. The initial step was to aggregate various smaller components of hexagon unit as this is a very common shape in nature. By creating multiple assemblies, various patterns were generated.
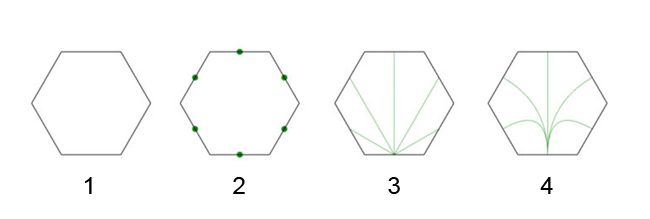
1 Base Model, 2 Subdivision, 3 Reconnect, 4 Bend
The edge conditions in all geometric shapes are unique and provide different simulations through use of the robotic fabrication process. In order to test major constraints and retain an equal amount of modularity in the design, we chose the hexagon which has six sides. For this reason we are able to compute variables of distance, infill patterns and become informed by data to decisions.

The workflow for utilizing the industrial robot is to be free from creative constraints that limit the manufacturing process. By utilizing VR in manufacturing we can enable to design by simulating in real time through grasshopper or model directly into the Rhino canvas.

A tufting gun is used to automate the tufting process, by adapting the tool to the robotic arm.
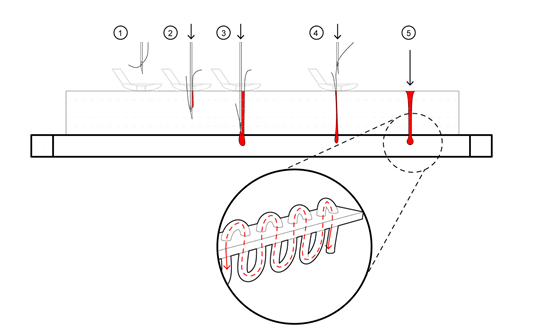
The yarn is fed through a hollow needle [1], which penetrates the stretched cloth backing [2-4] for an amount of length. Thus the tool can create two types of rugs, a cut or loop pile. We will be focusing on a loop pile [5].
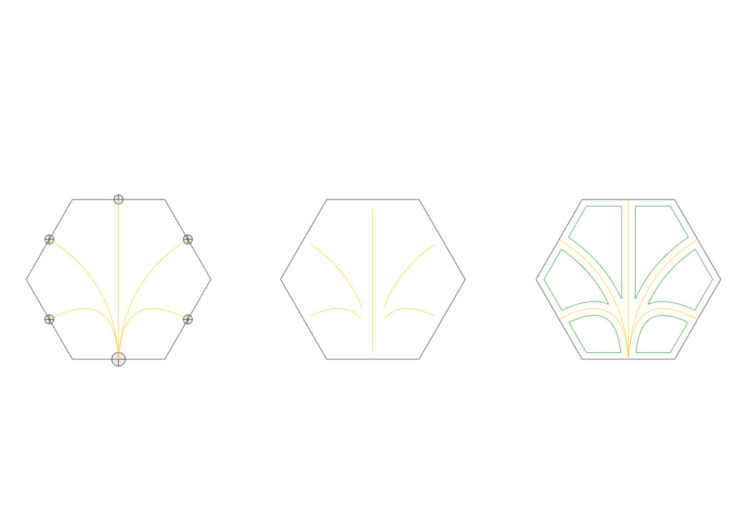
We began the tiles with a radial [tangent] outline. Where the grey blue yarn would follow parallel to the infill developed from the initial fabrication process. This was the best technique to reduce errors or instability through tension placed on the canvas.

We finalized fabricating the modules by infilling the pattern with a beige yarn color. This pattern reinforced the hexagons and was easier to generate shape in the design. The overall robotic sequence in real-time revealed that the best support for this technique is through tension in the tufting gun and additional reinforcement from the canvas.
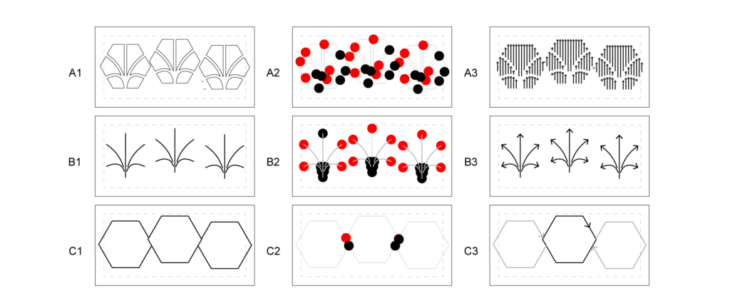
Our simulation process revealed how the raw material would insert through certain points of the canvas plane and exit with the intended geometry. A1 Perimeter bounds of infill. A2 Needle point entry [black], points of exit[red]. A3 Infill vertical sequence [left to right]. This process allowed our team to troubleshoot various techniques and make a final product with minimal defects. B1 Outline tangent to curvature. B2 Needle point entry [black], point of exit [red]. B3 Toolpath direction tangent to curvature. C1 Outline pattern. C2 Needle point entry [black], point of exit [black]. C3 Tool path direction.


Further, our findings reveal that we can imagine a process of sketching at the primary stage and investigative analysis at the production stage.
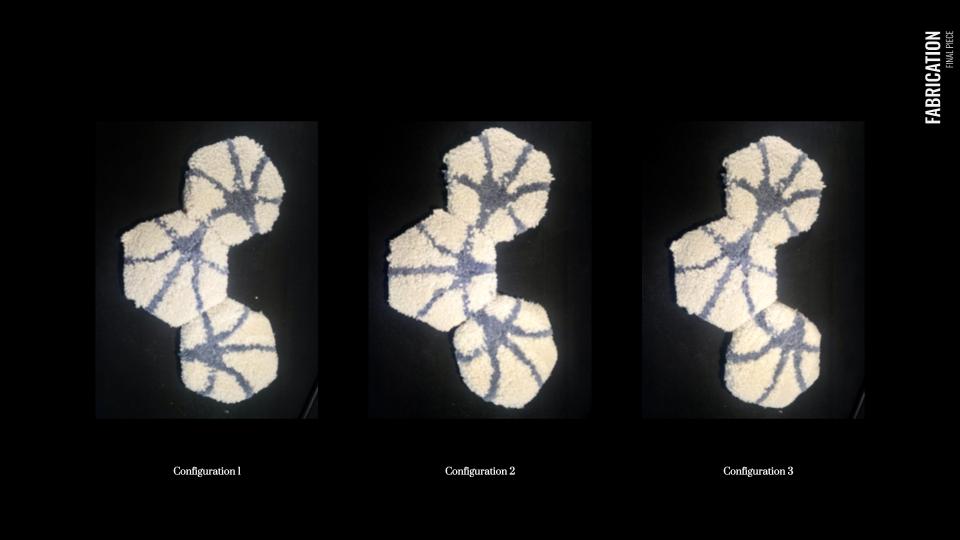
The final results of the fabricated modules underwent an additive process of yarn aggregation. The tolerances were much higher and resulted in accurate possibilities of designing through use of both VR and Rhino environments.
</p>
Tangled is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Advanced Architecture 2021/22 by Students: Rigoberto Moreno and Pamela Inegbedion and Faculty: Marielena Papandreou & Anastasia Pistofidou and Faculty Assistants: Aslinur Taskin & Daniil Koshelyuk
