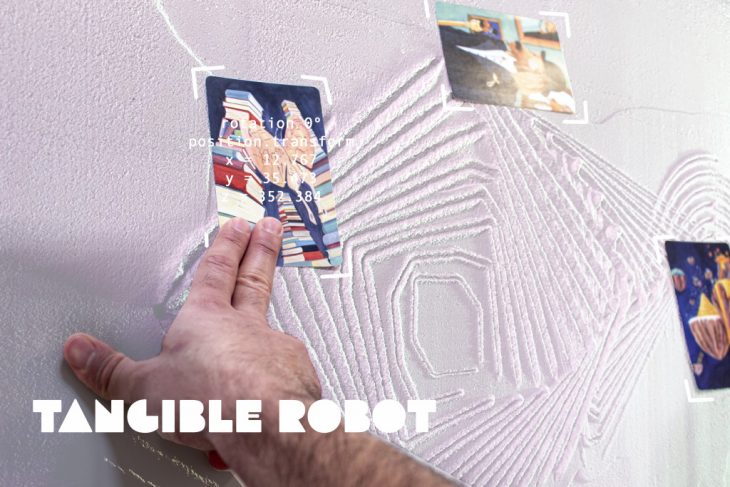
This project aims to create a physical interface to interact with the robot, exploring the possible outcomes of a tangible interface where the user can interact with the robot more naturally, in real-time, like using a handtool.
WORKFLOW

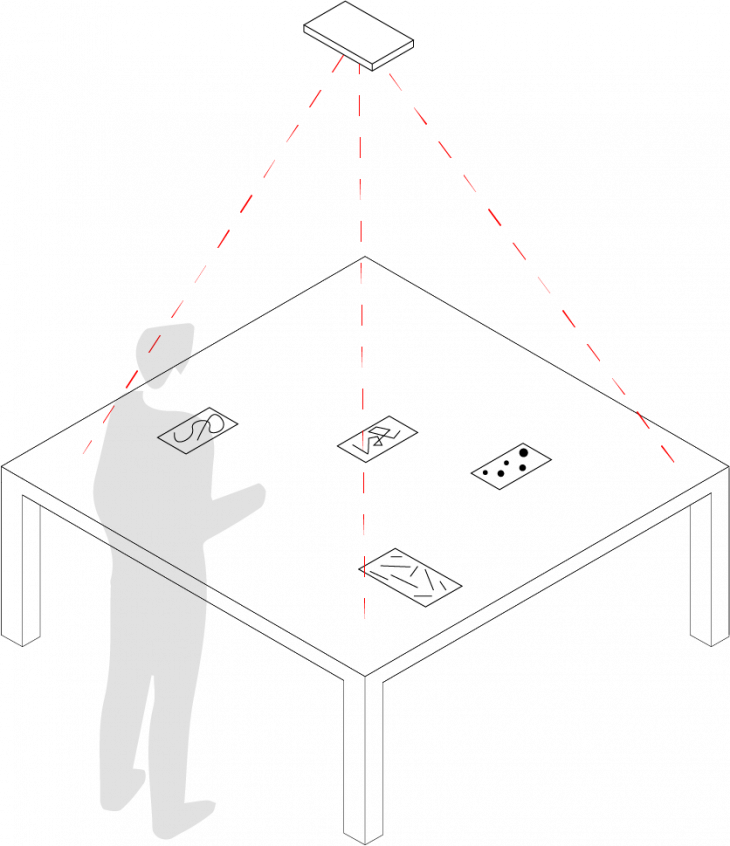
SETUP
Cards are placed on top of a table. The camera sends the live feed of the table to Vuforia Library in Unity. Grasshopper receives the data via UDP from Unity.
PROTOCOL
The canvas is mapped from the table to the working area of the robot.
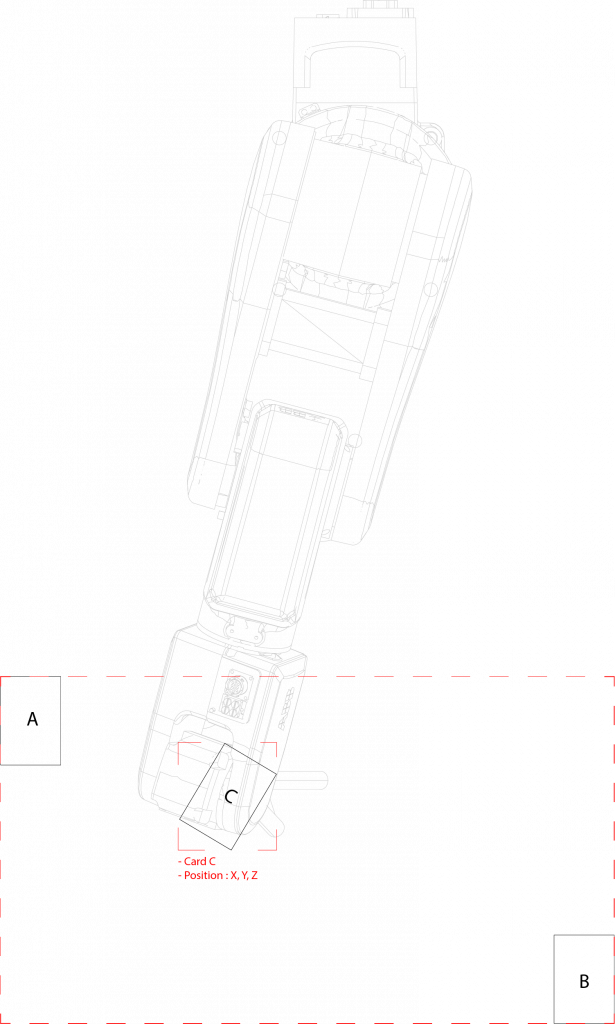
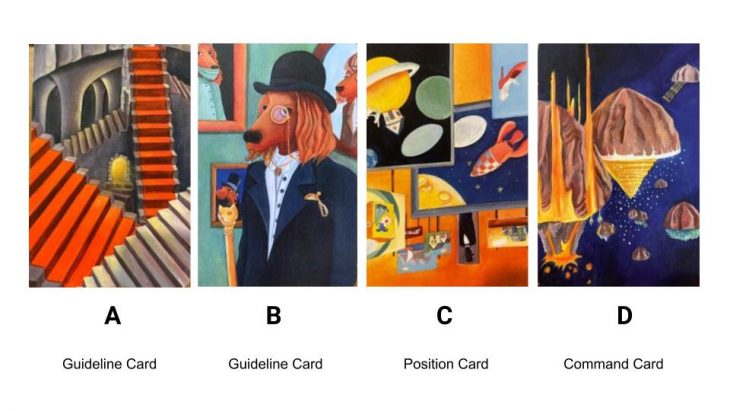
Unity reads the position of card C measuring them from card A and card B.
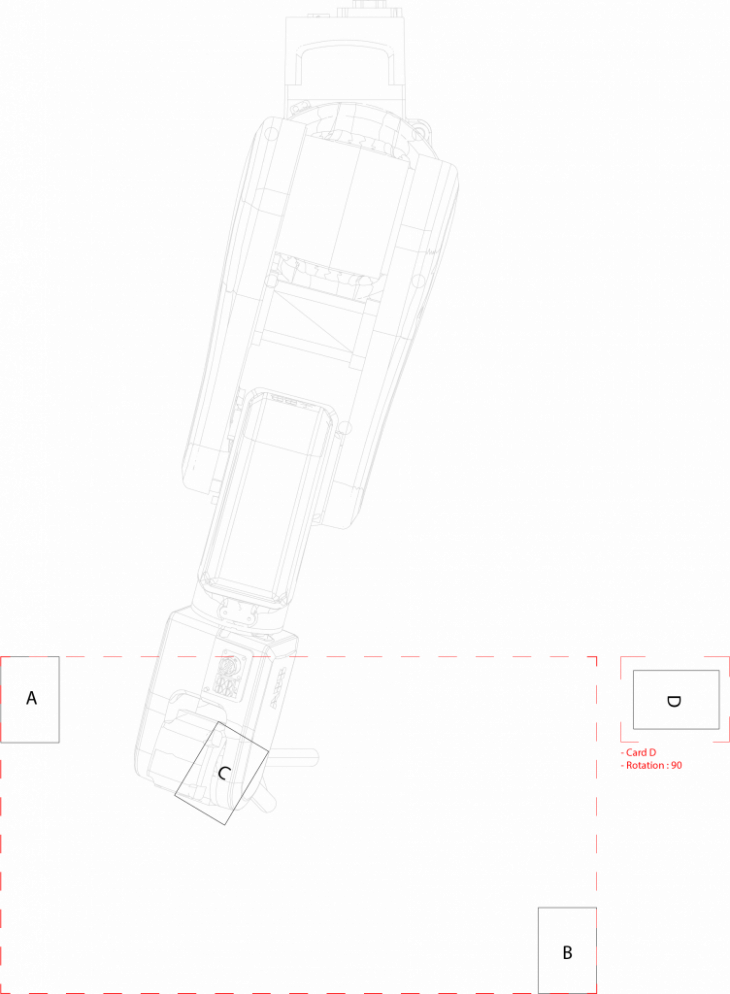
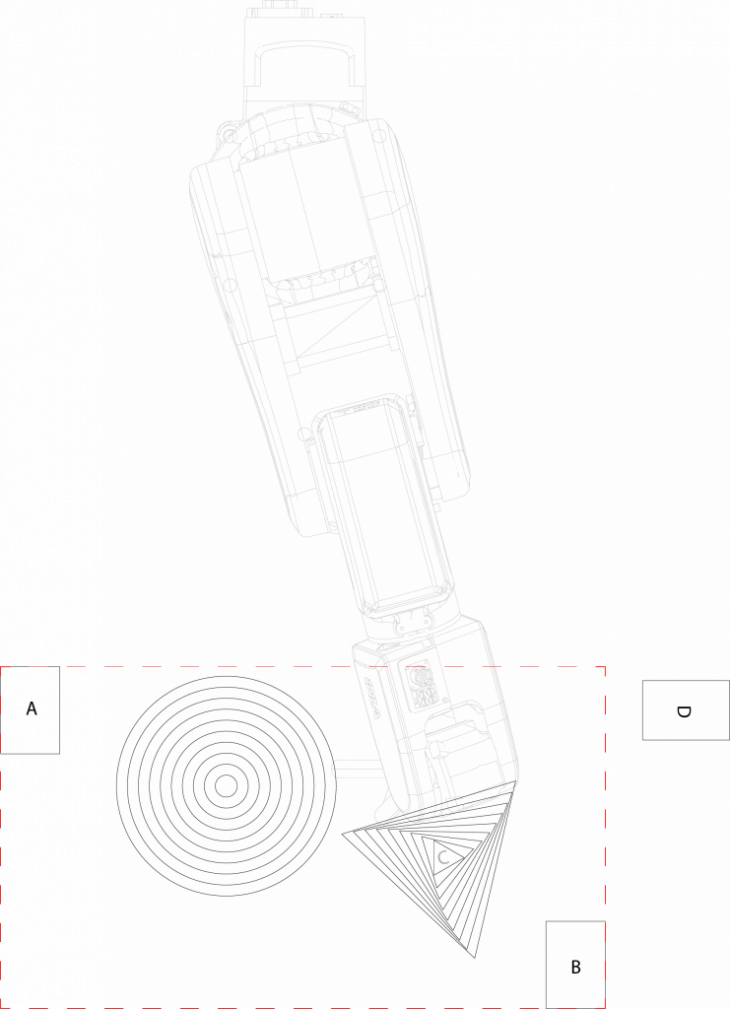
Card D provides the information of rotation data and works as a switch. As it is being rotated, drawing switches from one to another.
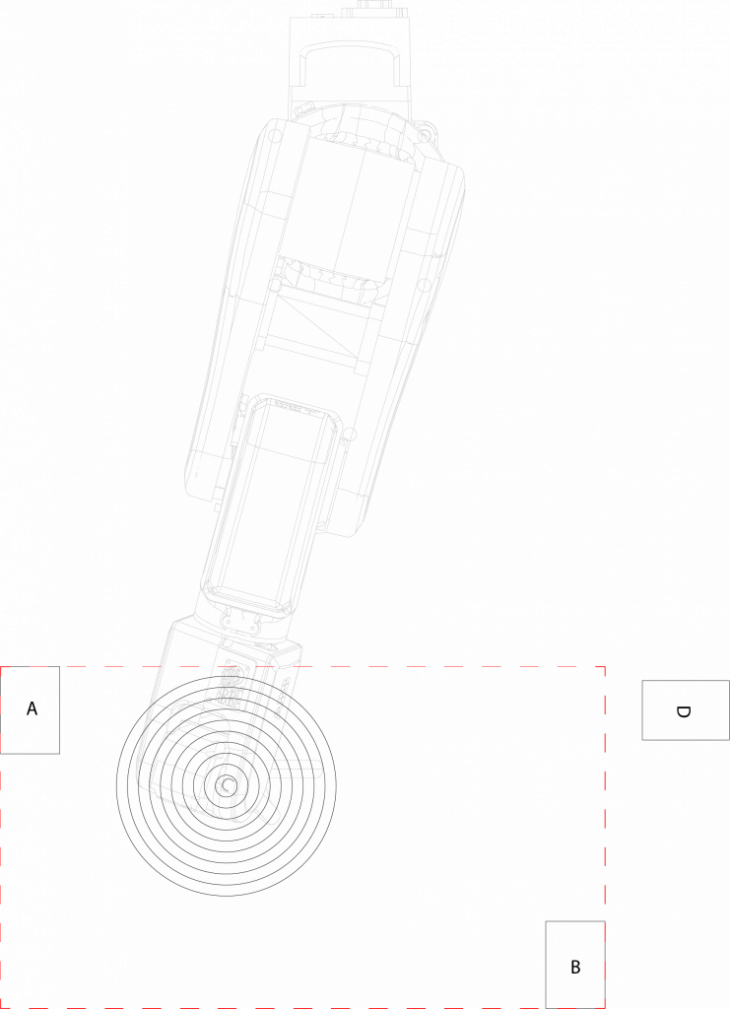
The data is sent via UDP communication to grasshopper. Commands are executed by the robot.

The tangible interface allows creators to interact with the robotic arm physically. It enables the human touch in the fabrication process that wouldn’t be possible in a digital world
Tangible Robots is a project of IaaC, Institute of Advanced Architecture of Catalonia, developed at Advanced Robotics seminar in Master of Advanced Architecture 02 program in 2020. Students: Aysel Abasova, Doruk Yildirim, Tolga Kalcioglu Faculty: Alexandre Dubor, Kunalijt Singh Chahdha, Angel Munoz Software: Rhinoceros, Grasshopper(Robots, Machina), Machina Bridge, ABB Robot Studio, Unity(Vuforia Library), iVCam Hardware: Computer, iPhone Camera, ABB 140 Robotic arm, IP camera, Router