SUPERVISED MACHINE LEARNING
Gradiations of Safety
Using OWL for Machine Learning in Grasshopper, Gradiations of Safety explores the potential to identify risk areas of safety within an environment using data collected from geo-localized points. The interface is set up as such :-
- An area is generated with randomized locations of cylindrical “trees”.
- Random geo-localized points are placed onto the area whereby there are 10 points for each level of safety ( Safe, Neutral and Unsafe )
- Using these geo-localized points several quantified data is extracted from each point to quantify the levels of safety :-
- The X and Y coordinate of the geo-localized point on the surface area
- The distance of the geo-localized point from the area boundary
- The number of intersections with the cylindrical “trees” generated from a personal boundary diameter of 2
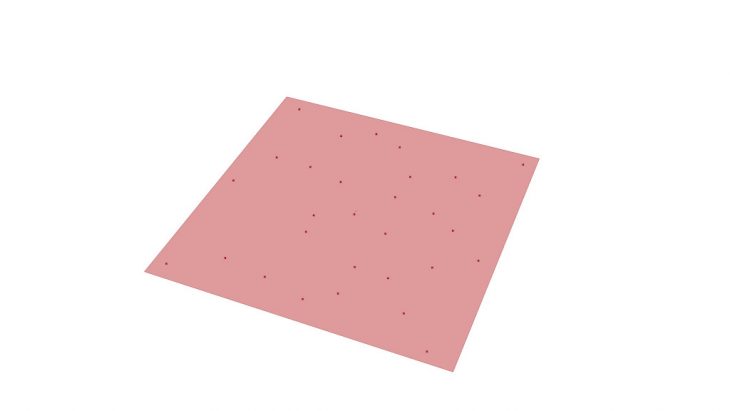
Geo-localized point coordinates with relation to surface area
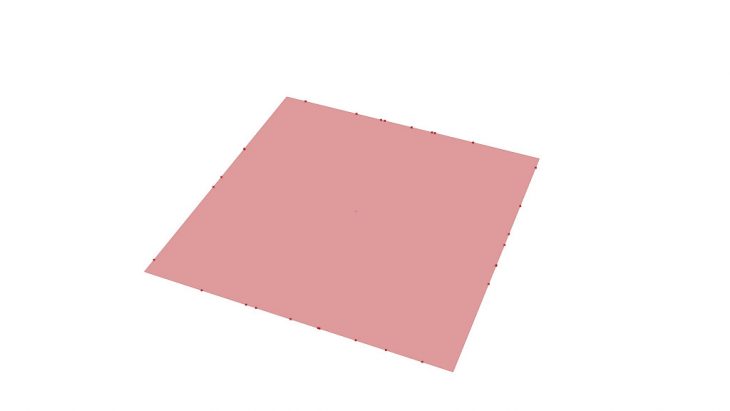
Geo-localized points distances to boundary
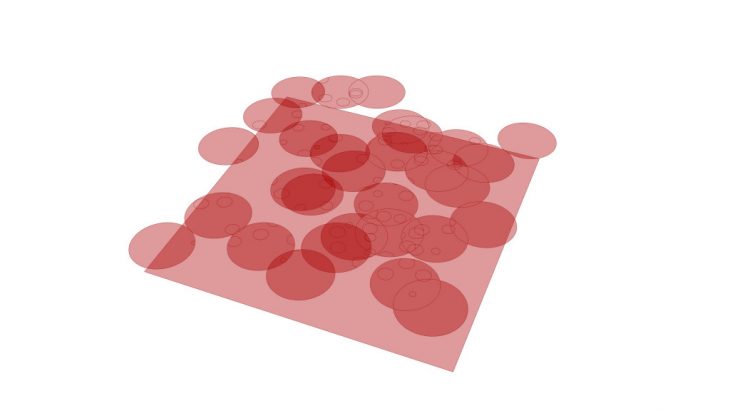
Geo-localized radii intersections with cylindrical trees
Using these quantifiable data, the information is fed into the OWL script for the supervised learning of the levels of safety. The area is then able to be evaluated with a point that is represented with a sphere that identifies if it is a mostly safe area ( shown in grass), mostly neutral area ( shown in grey ) or a mostly unsafe area ( shown in red ). The percentage of safety is also represented above the sphere.
Test Point ( XY Coordinate on Surface )

Test Point ( Distance to Boundary )
Test Point ( Radius Intersection with Cylindrical Trees )
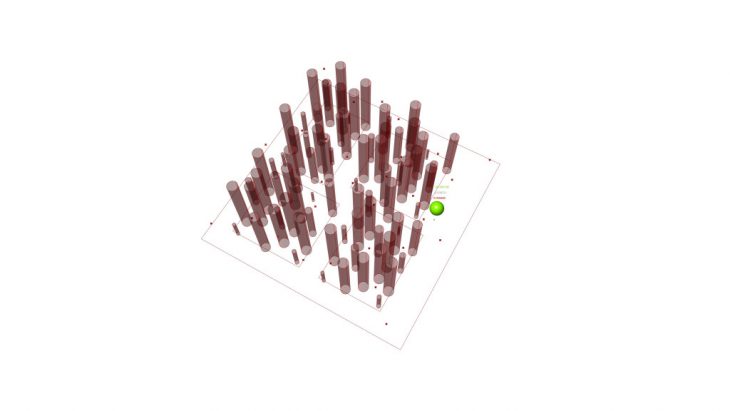
Test point ( Mostly safe location )
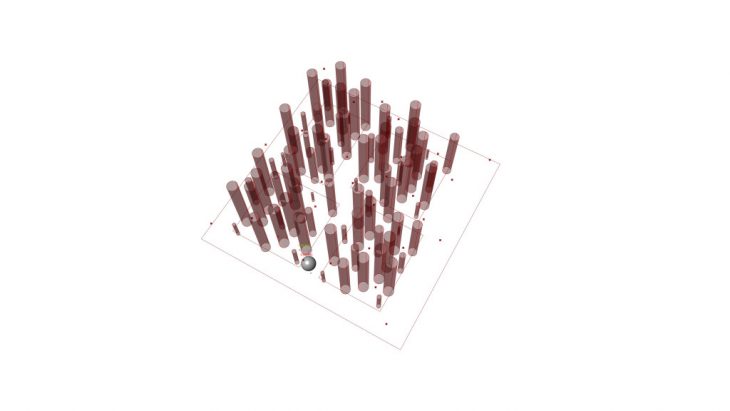
Test Point ( Mostly neutral location )
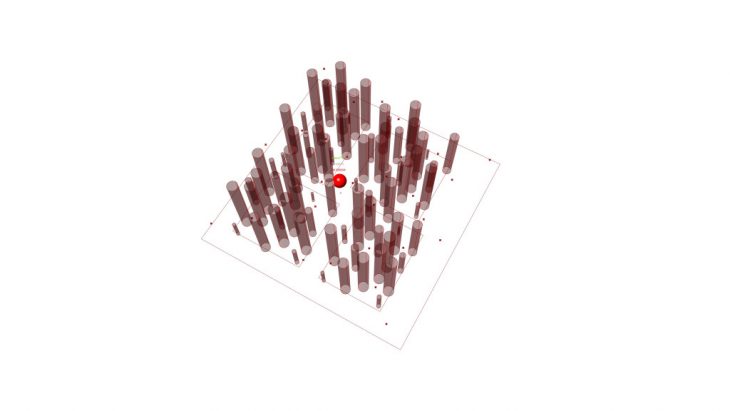
Test Point ( Mostly unsafe location )
Gradiations of Safety is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master of Advanced Architecture 2019/20 by:
Student: Surayyn Uthaya Selvan
Faculty: Mateusz Zwierzycki