
ABSTRACT
This research considers sensory perception as a departure point for exploring and understanding structural forces. Beyond visual stimulus, whole sensory perception expands our understanding and relationship with our surroundings. It curates our experiences of forces and materials that shape our environment and therefore opens up new opportunities for innovation in architectural and structural engineering. This research explores haptics as a sensory medium and reviews its adaptation as a means of engineering design and learning. It examines a few natural phenomena to understand how nature perceives and responds to forces to create interesting morphological variations. It also looks briefly at Gaudi and Otto’s tangible experiments for structural design, as well as more modern applications of haptics in engineering. It concludes with the application of haptics in learning and the hopes it holds for future generations in structural engineering design.
INTRODUCTION
Sense, Sensibility & Architectural Phenomenology
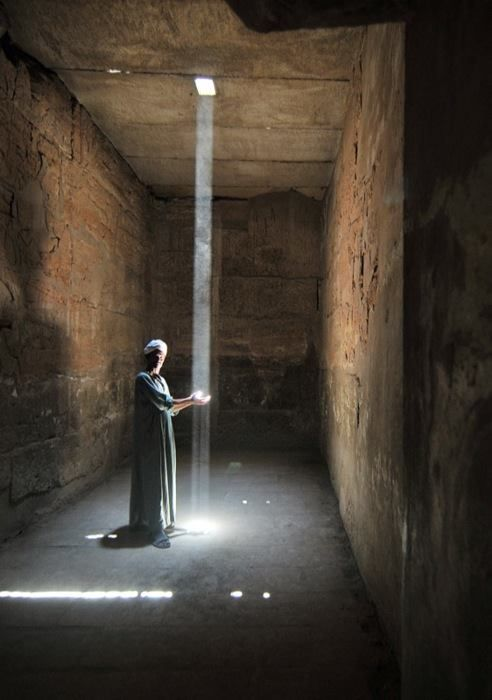
Our senses are windows to the world we live in; the interfaces between our matter, and our material and non-material environments. From the warmth of touch to the dewy smell of a spring morning, or in simple actions, such as the ability to coordinate our body parts, our senses shape our perception and understanding of self within our environments.
Architectural phenomenology considers how materials, light & shadow, and morphology engages all human senses, and how these engagements, or perceptions, influences our spatial experience. Architects championing phenomenology consider that the sensory experience between an architectural object and those who encounter it should be critical and complimentary. This requires mutual exchange between the observer and the object of the experience. This relationship confers a large responsibility on the architect. Juhani Pallasmaa in his book, the eyes of the skin, postulates that an architect conveys his emotions to the user through the architecture they create. We abstractedly design ourselves into projects. In a way, our senses and sensibilities infuse subliminal gestures into our design, gestures that are integrated into the user experience of our creations.

Multi-Sensory Design In Architecture_‘Architecting’ experiences
However, in architecture and its allied disciplines, the visual senses take precedent in deciding spatial experience. For example, we tend to think of our contexts in terms of objects. A building consists of walls, floors, ceilings, doors and windows. If we pause to think about them in terms of their materials or the forces they bear, we begin to perceive wood, metal, concrete, glass, compression, gravity, pressure, wind. This observation, for us, highlights the distinct disconnect between substance, medium and forces. A disconnect we believe happens when the visual sense is dominant in the experience of our surroundings. On a more personal level, we were confronted with our disconnect when we signed up for this topic. Most of us signed up thinking we would get to research many of the fancy lingoes in structural design. You can imagine our shock when we were confronted by words like haptics, sensibilities and the likes. This experience highlighted our disconnect and it became clear that to research this topic further, we have to deconstruct our sensory bias.
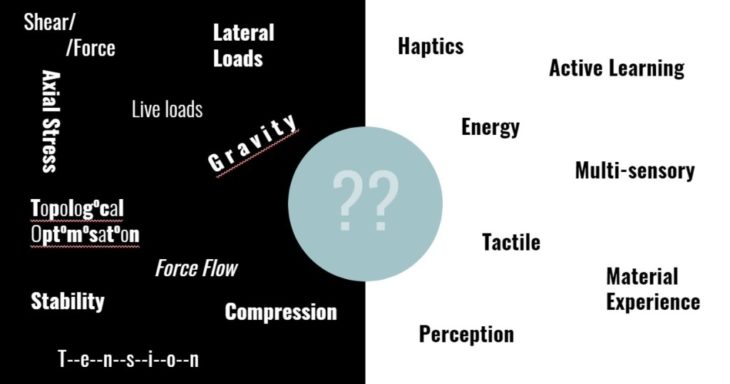
Sensory Bias Illustration
Deconstruct Sensory Bias
Deconstructing Sensory Bias_Our research approach>Our awareness of this subconscious unlinking spurred curiosity about how the perception and consciousness of matter and materiality influences structure, spatial form and experiences. Therefore, this theory topic will focus on multi-sensory design (with a focus on forces and materials) for multi-sensory experiences.
HAPTICS IS KEY TO MULTI-SENSORY PERCEPTION;
BUT WHAT EXACTLY IS HAPTICS?
HAPTICS
Haptic perception is simply the sense of touch. We are adept at feeling objects with our skin through skin deformation (tactile perception), and muscular stretching & joint angle for monitoring limb position and movement (proprioception). People are proficient at recognizing objects by haptic exploratory procedure that we use every day nearly 100% with just 2 to 3 seconds on 100 random objects blindfolded (Klatzky et al., 1985). Delving below the skin, we have different nerves perceiving different types of sensations such as texture and shape, or objects slipping through our grip. Our brain puts this together to create our sensory perception. With proprioception, the tendon feels our limbs are and gives us a perception of our own position and weight and balance of our own body.
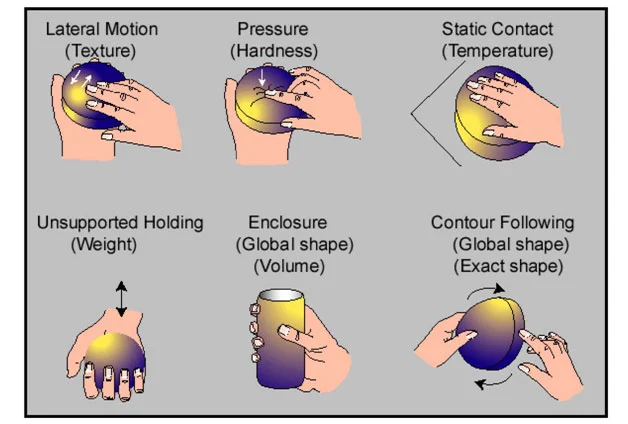
Haptic Perception_© Susan Lederman and Roberta Klatsky
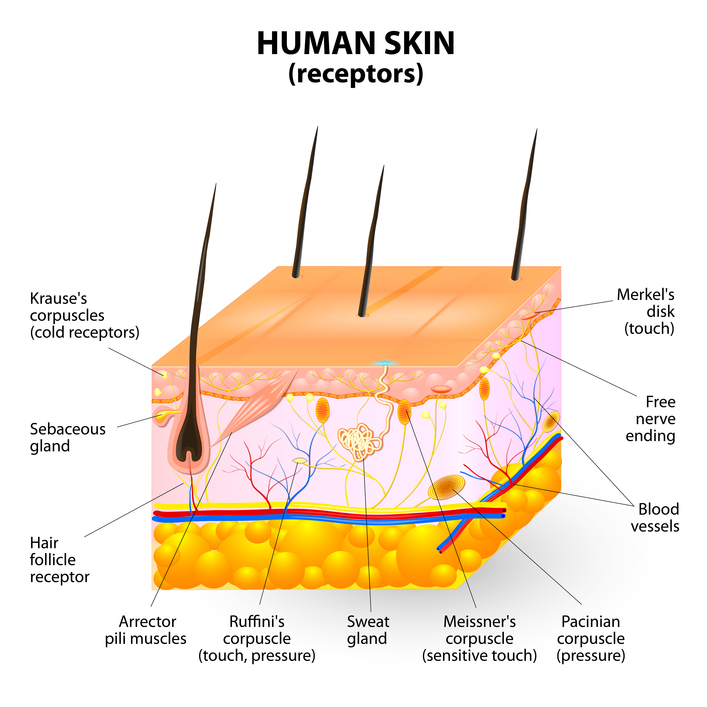
Human Skin Receptors
Image by Designua. Source:Shutterstock
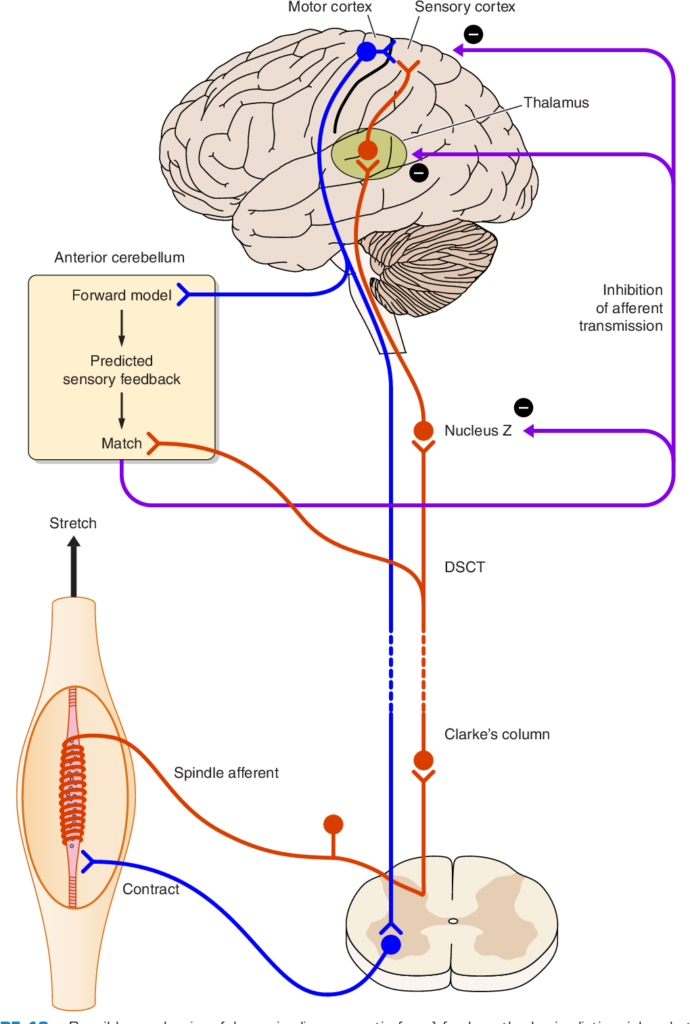
Proprioception mechanism_credits:researchgate.net
There are researches to understand haptic perception and many of these researches have found application in fields like medicine, where haptic feedback is used in robot-assisted surgery. An example much more related to architecture is the case study of Chris Downey – the blind architect – who lost his eyesight in 2008, and leverages his other senses and new perspective to bring about a new kind of architectural vision. Using a printer that can emboss architectural drawings, he reads them through the sense of touch and translates his ideas by using Wikki Sticks – pliable wax sticks can be broken and shaped to form new lines that will stick to a paper.
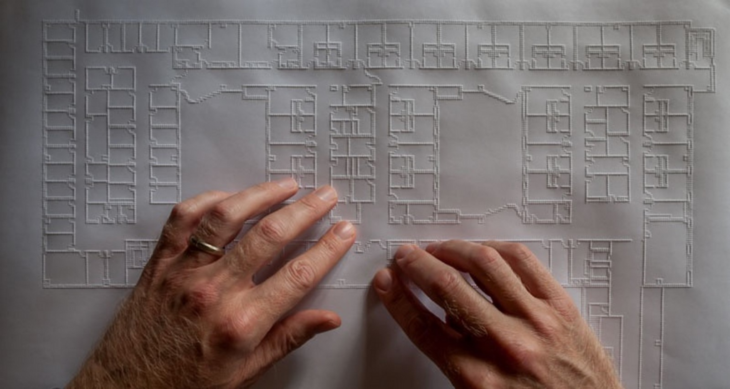
Reading drawings with touch_Image by Dan Fogg
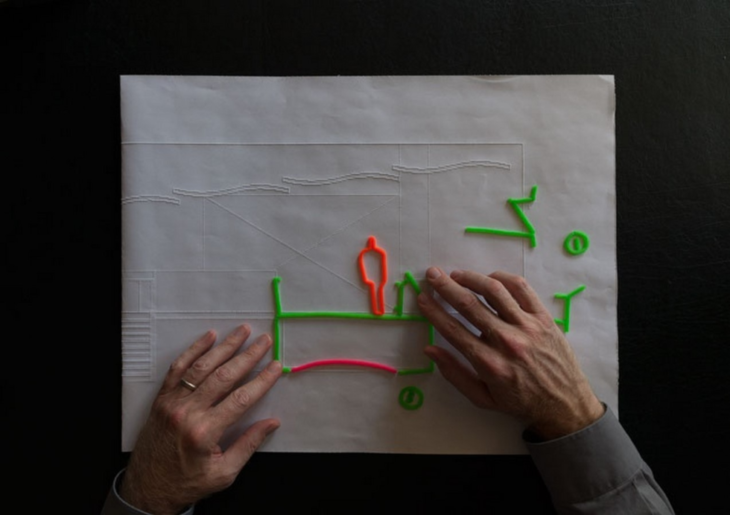
Drawing with Wikki sticks_Image by Dan Fogg
GOING FURTHER, WE WONDERED WHAT WE
CAN LEARN FROM HOW NATURE PERCEIVES
AND RESPONDS TO FORCES.
FORCES AND MOPHORLOGY
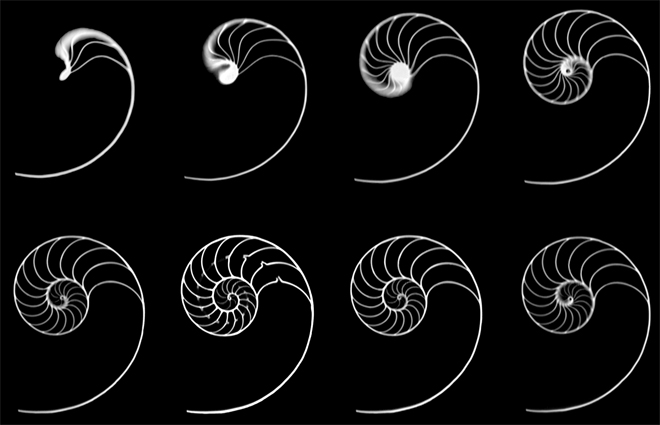
In the book, On Growth and Form, D’Arcy Thompson explained that the morphology of living or non-living objects is a resultant of several forces that symbolise different kinds of energy. He added that growth is a form of measure of the rate of change; changes that happen in response to energy and forces within the natural environment. Thompson’s stand offered a plausible explanation for form, beyond the theory of evolution proposed by Darwin, and Paley’s natural theology that offered (non)explanations for many natural occurrences at that time. As an example, he deduced the mathematical relationship between the rate of growth of the Nautilus and its exterior shell. The shell’s section is a logarithmic spiral and its shape does not change as it grows; a large nautilus shell is similar to a magnified small shell. The shells have chambers of sizes increasing in the Fibonacci sequence, the mollusc depositing materials along the shell’s rim as it grows. Given the precision of this coordinated growth, our assumption is there must be a sense of proprioception, a form of awareness of the snail’s mass, that enables its precise deposition of sediments for the formation of its shelter.
Nautilus Section Cut_Image by Florian Elias Rieser on Wikimedia Commons
Going further, D’Arcy’s work and more modern texts on emergence demonstrate complexity arising from several interrelations at different scales of systems in nature. These systems often consist of many parts operating individually and collectively at many integrative levels. For instance, In the flocking of birds, a global geometry evolves, one that is driven by individual sensing and response to actions.

Flock of Birds_Image by Walerian Walawski
Nature responds to forces, whether visible or invisible, felt or seen. All senses are involved. The response is mostly wholesome, optimising natural geometries, material distribution, and social connections and interactions.
BUT HOW IS IT ALL CONNECTED TO
STRUCTURAL FORCES?
Nowadays, engineering structures are done using digital models, which are representations of actual structures. In this abstraction, they lose a sense of scale, not just in the structure’s physicality, but also in the forces acting on it and its reaction to the forces. People often talk about having a feel for something, as if they can physically probe it. Perhaps repeatedly, we see that the sense of touch is key to learning about objects and activating all other senses (beyond vision) is key to innovation. For more innovative breakthroughs, there is a need for a paradigm shift, a move towards deconstructing sensory bias to create tangible models for analysis with both haptic and visual interfaces.
Digital Handshake_Image by Tampatra on Stock
NEXT, WE LOOKED INTO MODELS
AS PHYSICAL AIDS OFTEN USED
TO VISUALISE ‘INVISIBLE’ FORCES.
TACTILE EXPERIMENTS
Antonio Gaudi and Frei Otto works were rooted in their physical investigation of form and materials, performing experiments were critical to design decisions and outcome of projects. Antonio Gaudi was especially famous for his dislike of 2-dimensional drawings and often sought alternative design processes that allowed him to engage fully with his designs. In the hanging chain experiments he created for the Colonia Guell Church, he suspended ropes from the ceilings and added weights on them; with the help of mirrors below this model, he translated the catenary curves from the hanging model into the combination of curves that defined the church’s columns and arches. One can imagine how forms started to unfold before him, as he was physically hanging weights on strings.
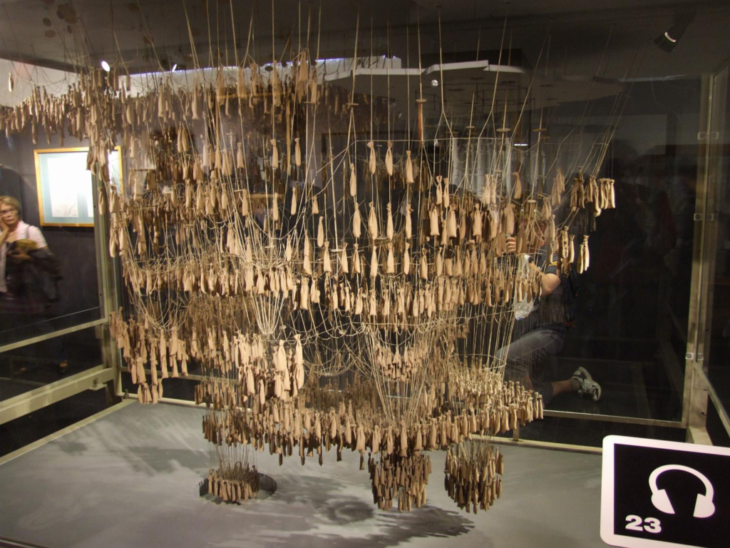
Static Model of LaSagrada Familia_Image by Rüdiger Marmulla, Wikimedia Commons
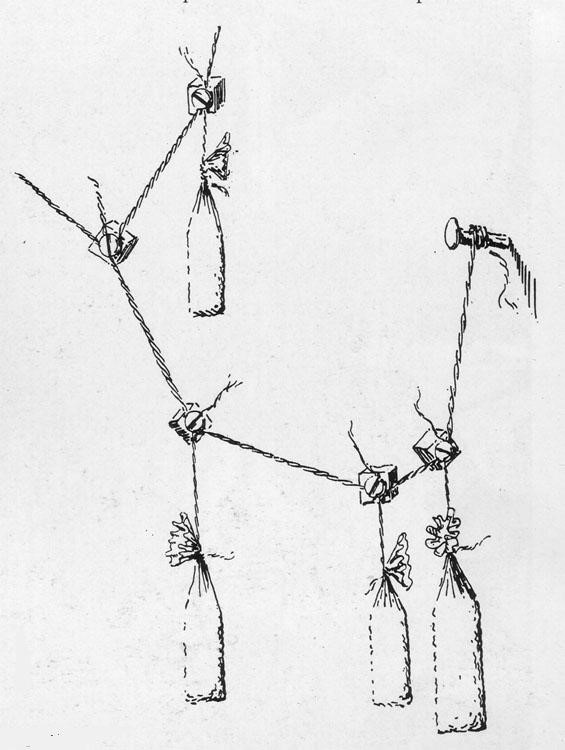
Gaudi’s Weighted Chain Experiments_Image by Gaudiclub
Likewise, Frei Otto also had a multi-dimensional approach to architecture with an emphasis on experimentation and model-making. In 1961, he began conducting a series of experiments creating minimal surfaces with soap films and strings. In his words, he reveals that critical discoveries did not arise from method but from unexpected observations. Nowadays, the use of computer tools diminishes the need for experimentation. While Otto did eventually embrace the technology of his time in calculating his structures, they were largely complementary to his tactile experiments.
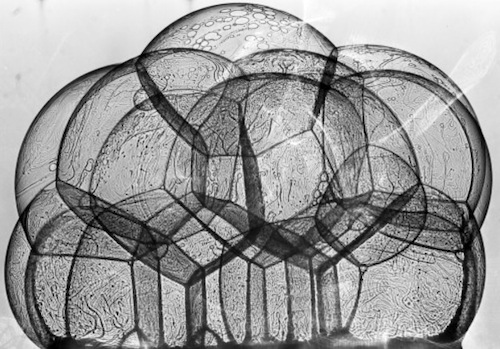
Soap bubble Experiments_Image Couresty of archdaily
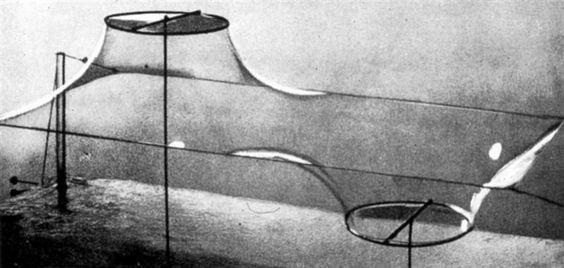
Soap film minimal surfaces_Courtesy of Archdaily
Through experimentation, both architects created geometries previously assumed to be impossible, especially during a time when no advanced computational technology was available for such calculations.
LOOKING AT PRESENT TIMES,
WE SEE HAPTIC PERCEPTION GRADUALLY
MAKING A RETURN INTO
DESIGN AND ENGINEERING.
MODERN EXPERIMENTS
Haptics has found a variety of use in modern times, from digital/physical AR interfaces applied in construction to smart materials that engage users, applications encouraging interactions beyond the visual stimulus are slowly but surely becoming commonplace in contemporary architecture and engineering.

AllBrick & UTAS – Holographic Brickwork
Taking Fologram as a case study, we see the use of holographic guidance in augmented reality interfaces to direct real-time the actions of artisans using traditional handcrafting tools to create intricate and complex objects. Diving more into the utilization of human innate haptic sensors with technology such as virtual reality (VR), augmented reality (AR) or mixed reality (MR) and the combination of all this XR, a state of altered realities, we begin to realize how our natural haptic sensors such as sight, sound, touch and smell can be incorporated with new technologies and evoke a human connection, for educational purposes and in the realm of architecture, engineering and construction environments.

Steampunk Pavilion_Soomeenhahm Design
In collaboration with Fologram, Soomeen Hahm Design, Igor Pnatic and Format Engineers designed and constructed the Steampunk Pavilion, the winning proposal for the 2019 Tallinn Architecture Biennial installation competition. The design bends, twists and weaves standard lengths of hardwood and stainless steel into complex curving parts while utilizing a combination of hand tools and interactive holographic guides with Folograms AI application and AR / VR headset technology. Natural human haptics (Site & Touch) and AI technology through Folograms software and VR hardware were used for every aspect of the Steampunk pavilion fabrication and assembly process. This case study proves the concept that haptic driven technologies will disrupt the traditional way AEC operations are implemented.
In this specific project, the Fologram technology helped:
- Avoid using low-quality timber when laying up timber parts up to 12m long
- Placing formwork and steaming each timber element to the desired shape
- Bending 424 unique steel bracks in the structure
- Assembling parts on-site & digitizing the built structure

Atmospheric Encounters, Aesthetics of Air, Visualising the Invisible _Dr. Matte Wagenfeld
Haptic design has also found use in interior spaces, on objects and surfaces that we encounter day by day. Materials that display smart behaviours, using their reaction to an external stimulus to initiate or actuate an active response without an active control system, are being used by designers and architects to create more dynamic and adaptable living and working spaces. These smart materials offer a rich potential to retrofit interactivity into domestic surfaces. Organic User Interfaces are defined as non-flat multi-touch interfaces that can exist in both rigid or flexible forms, can take any shape, and can actively or passively- change this shape. These kinds of flexible and dynamic sensing materials are more feasible and affordable than ever.
Kinetic art installation. Dynamic brick wall by ARCHITIME design group
WITH THESE RECENT SHIFTS,
GREAT LEAPS WILL BE MADE
IF MULTI-SENSORY PERCEPTION IS INTUITIVE.
WE BELIEVE EDUCATION IS KEY TO
BUILDING THIS INTUITION FOR
STRUCTURAL FORCES, THROUGH HAPTIC
LEARNING AND KNOWLEDGE CONSOLIDATION.
THE WAY FORWARD
Haptics aid our understanding of objects and surroundings. This has many implications for learning, especially about concepts that are invisible. Current technology makes digital-haptic interfaces possible, an innovation that significantly contributes to active and hands-on learning and embodied knowledge acquisition. With cognitive processes, such as moving from concrete to abstract thinking, it is assumed that multi-sensory perception in learning is involved, in theory. (Loucks-Horsley et al., 1990). Haptic experience in learning goes beyond tactile perception. Much like Otto’s experiments, the touch is much more intentional, almost systematic; unprecedented observations often arise out of this systematic method.
Reiner (1999) investigated the role of haptic perception in learning about forces and fields. From his experiment, he presented the positive educational impacts of haptics through personalised experiences; creating conditions that stir up embodied knowledge, where the body knows how to act intuitively. Forces are invisible and structural concepts to explain them, while often sounding complex, are fundamentally uncomplicated. Teaching these concepts using active and interactive learning systems can help both young and ageing minds grasp them better through knowledge consolidation.
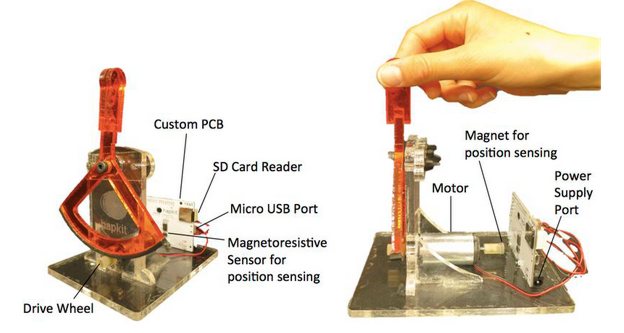
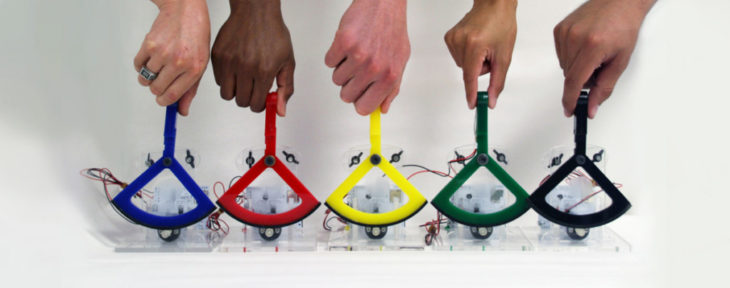
There are researches to understand haptic perception such as Hapkit, a version of the Haptic Paddle, which was originally designed in Prof. Mark Cutkosky’s laboratory at Stanford University in the mid-1990s. Hapkit is an open-hardware haptic device allowing users to input motions and feel programmed forces in one degree of freedom. This enables interactive simulation of virtual environments that represent realistic physics (such as springs and dampers) and creative new touch sensations (like textures and buttons). The Haptic Paddle was used as an educational device that students could assemble and program to learn about dynamic systems.
CONCLUSION
At the inception of this seminar, we had experiences that led us to question and reflect on our sensory perceptions. In the process of navigating this realisation, and exploring the world of haptics and touch-based model making and simulations, some of the questions that came to mind were:
- How do we begin to integrate them into our current design and computational workflows?
- Are there opportunities to engage other kinds of senses, beyond vision and touch? If we could hear gravity, what would it sound like, how can we design with it? Perhaps this awakening is making our minds run wild.
- These curiosities about forces that we can’t see may better be expanded and understood if we can see and feel them
- How can we use haptics to develop a ‘feel’ for structural forces?
While these questions linger in our minds, we reflect on these words by Juhanni Pallasma “great architecture makes us aware of gravity and earth. Architecture strengthens the experience of the vertical dimension of the world, at the same time as making us aware of the depth of the earth, it makes us dream of levitation and flight…” With this awareness, we hope to keep deconstructing our sensory bias, to keep actively learning, to sense wholly and diligently, and hope that someday, we will develop an intuition for forces.
REFERENCES
- On Growth And Form, Third Edition D’Arcy Wentworth Thompson
- The Eyes Of The Skin, Architecture And The Senses, Third Edition Juhani Pallasma
- The New Mathematics Of ArchitectureJane Burry & Mark Burry
- The Architecture Of Emergence, The Evolution Of Form In Nature And Civilisation Michael Weinstock
- Shapes,Philip Ball
- Gaudi, Maria Antoinetta Crippa
- Frei Otto The Structure of Vagueness
- Buildings and Bird Skulls: Frei Otto – Wings Worms and Wonder (wingswormsandwonder.com)
- Holographic Brick Construction of the Hobart Hospital, Australia
- AllBricks & University of Tasmania (UTAS)
- Steampunk Pavilion, Tallinn Architecture Biennale (TAB 2019), Estonia
- Soomeen Hahm design, Igor Pantic & Format Engineers
- Neo – Natur Sculpture,, Futurium, Berlin
- ART + COM, Schiel Projekt, Studio Babelsberg & ArtEngineering
- Frei Otto, The Importance of Experimentation in Architecture
- Haptics in Education: Exploring an Untapped Sensory Modality – James Minogue (The College of New Jersey) and M. Gail Jones (North Carolina State University)
- Hapkit_Stanford University School of Engineering
- The Proprioceptive Senses: Their Roles in Signaling Body Shape,Body Position and Movement, and Muscle Force – Scientific Figure on ResearchGate.
Sensing Forces is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at
Masters in Advanced Computation for Architecture and Design (MaCAD) in 2021/2022 by students: Dami Akinniyi, Alexander Tong, Ara Keuroghlian, Rodrigo Alvarez and Sidhant Choudhary, and faculty: Jane Burry.