Reinforcement of The Structure:
As part of the process, the workshop had an aim of reinforcing the structure by extruding extra materials on the joining parts between the cells (units produced by an agent). Due to the differences between the designed structure and the fabricated geometry which has roots in, first, the fabrication and assembly errors, and second, the ever-changing nature of the design, it was not possible to generate the tool-paths required for such a task directly from the designed structure. This calls for a system with feedbacks to enable for extracting the tool-paths directly from the physical model.
Exploring the topic, there were a few different proposals for achieving this goal which can be separated into two main categories: The tool-path extraction, and the execution method.
Tool-Path Extraction:
For the first part, there were the following alternatives.
First, was using the Fologram’s feedback system to map the required path into a digital model. In this process, an ARUCO marker was used to mark the points along the path and due to the known pose of the marker, the Fologram could transfer the point into the digital environment which makes it possible to generate the tool-path for the robot through these points. However, the considerable error of calibrating the Hololens and the physical robot cell, and the error in estimating the marker’s pose were the main obstacles on the way.

KUKA-KR-150
The second alternative for the purpose was to use the hand-guidance feature of the KUKA iiwa robot. Using this feature leads to the accurate mapping of the points in the robot coordinate system. The limitation of this method is the reach of the iiwa robot. KUKA-LBR-iiwa-14, with a reach of 820mm, can be guided through the path manually and re-run the same for extrusion. However, the small reach of the robot will dictate reinforcing the pieces in smaller batches. Considering that the pieces only find their shape when connected together, the batch will need some external support to keep it temporarily in shape for reinforcement to be applied. This alternative eventually failed due to technical issues in the robot control.
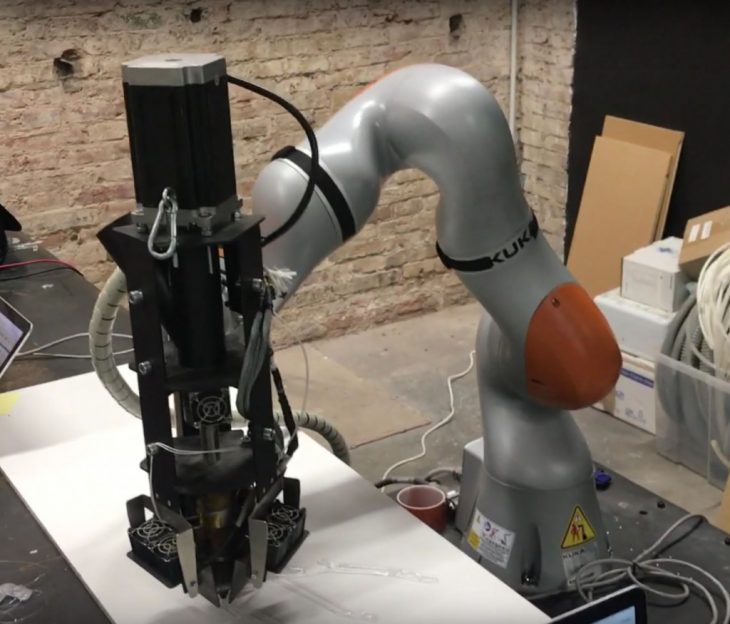
KUKA-LBR-iiwa-14
Extruding the Reinforcement:
Considering the tool-path for the robot solved, the second issue was to apply it on the structure while having the flexible nature of the structure in mind. The problem arises from the extrusion of plastic which needs to be pressed against the surface in order to form a reinforcement layer on top of it. This means the robot should be able to scan and cover for the movements of the structure while printing. As the thickness of the printed layer cannot exceed 3 to 4mm, this process needs to have a tolerance smaller than this number to ensure a successful extrusion. The different options in hand were as follow:
The first option was to use the force feedback of the iiwa robot. This robot can be programmed to apply a constant force while navigating a tool-path along a certain direction (extrusion direction in this case) and do the path modification automatically. This was not achieved due to problems in controlling the robot.
The second option was to use a KUKA-KR-150 with a reach of 3m that can cover for much bigger batches of cells to be reinforced. By this mean, a sensing system should be integrated into the robot to enable the scanning of the changes in real-time. For such a sensor, there were two options to consider. First was a laser range-finder, which after some testings proved not to be reliable because of the transparency of the printed pieces. The laser showed unreliable readings in front of the transparent plastic. The second option was an ultra-sonic TOF range-finder. Although this type of sensor scans for the closest object in a range of 15 degrees from the axis of the sensor, this was not considered a problem as long as the structure is the nearest object to the sensor while printing. Despite the datasheet of the sensor which claimed it to have a maximum of 1mm error, the sensor never had a better result of 12mm error in a set of consecutive readings from a 300mm distance which is the minimum range it could detect.
After all, the best option still seemed to be using the intelligence integrated into the iiwa robot to apply the reinforcement layer. However, the reach of the robot still proves to be a problem. The limited time of the workshop does not allow for radical solutions like mounting the iiwa robot on the KR-150 in order to cover for the limited range of it.