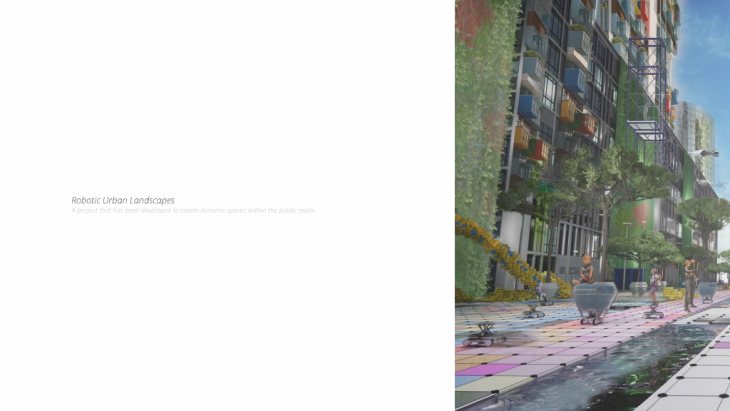
Robotic Urban Landscape
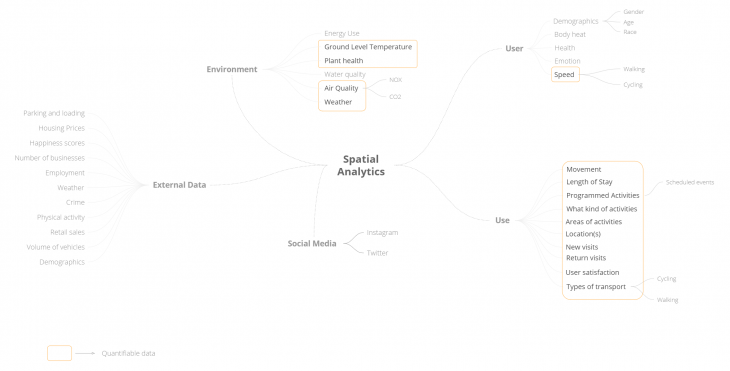
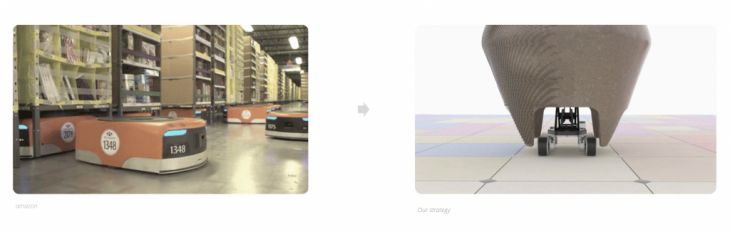
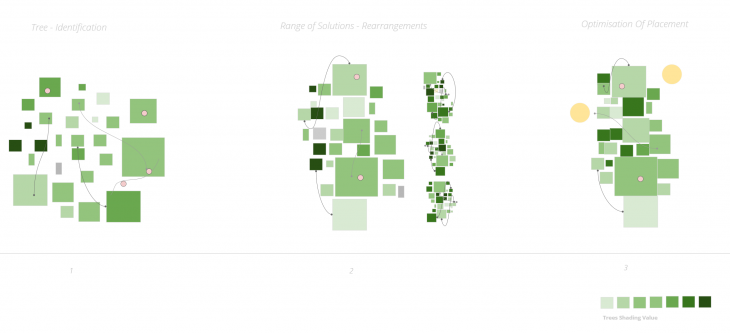
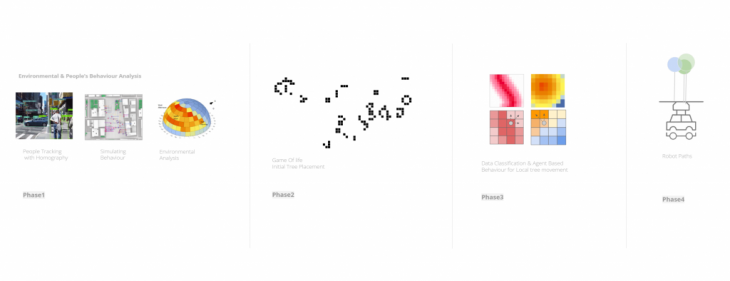
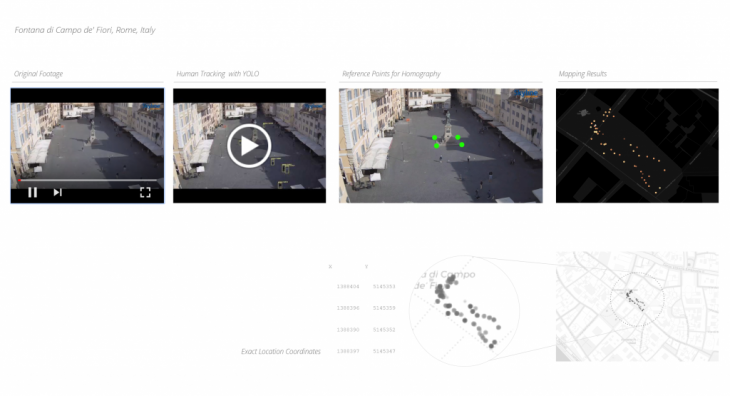
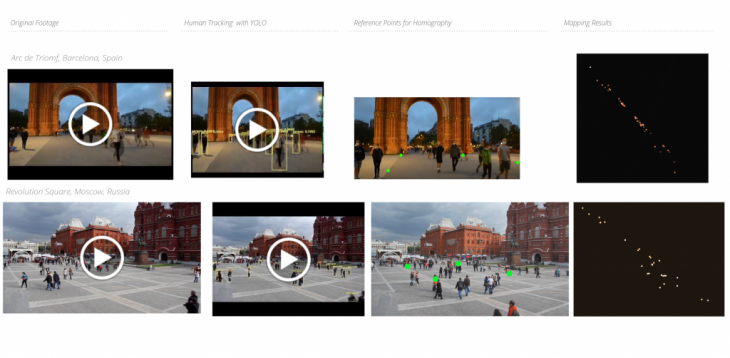
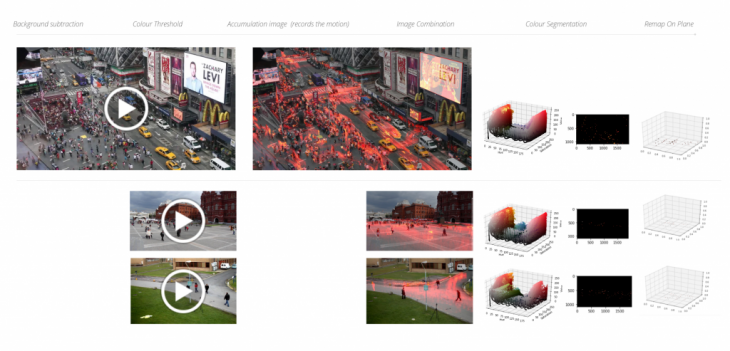
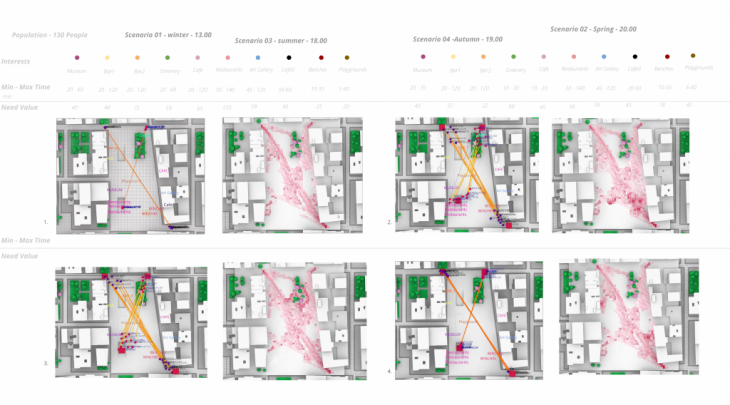
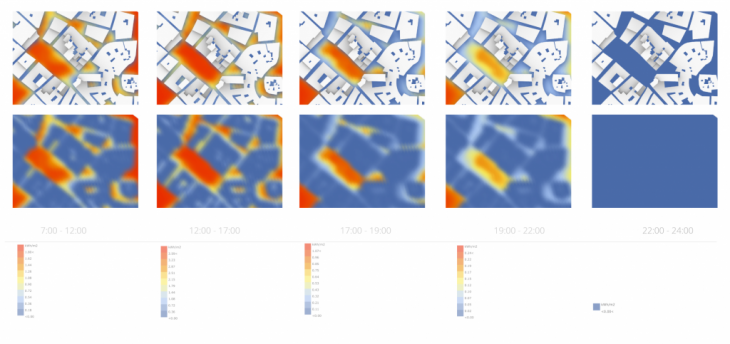
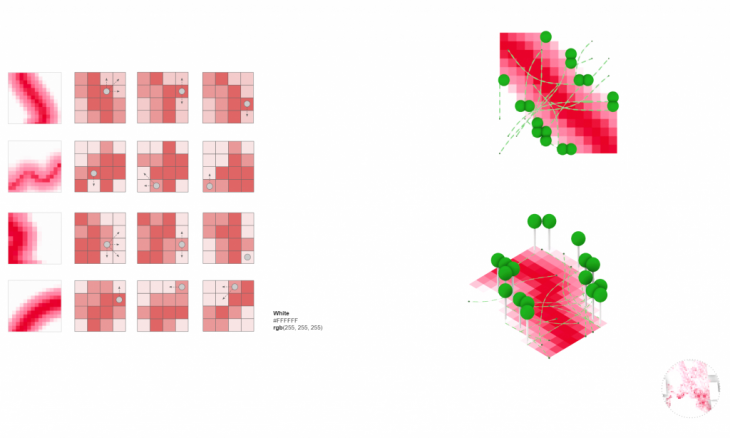
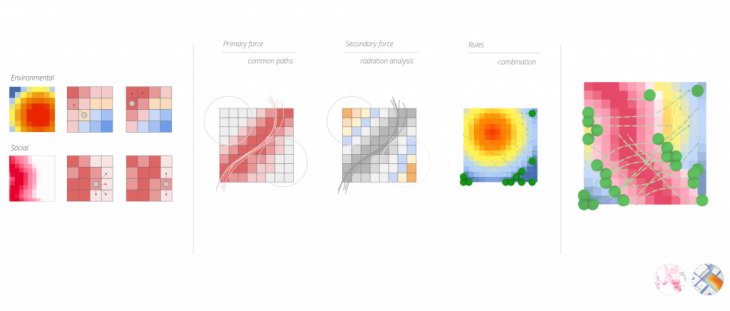
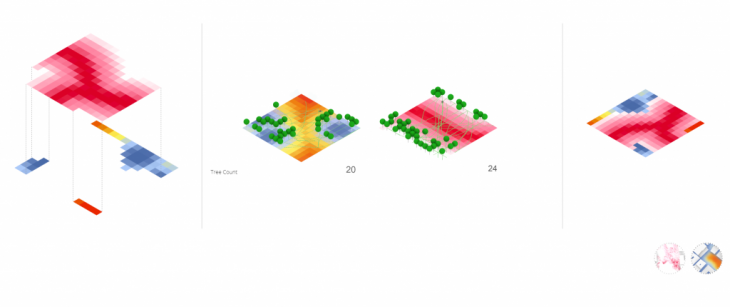
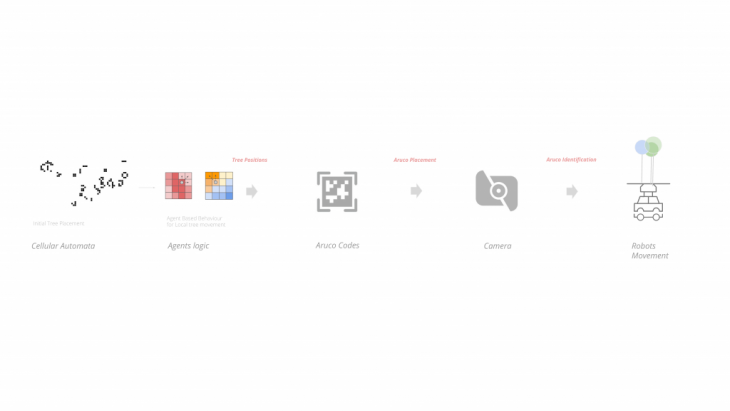
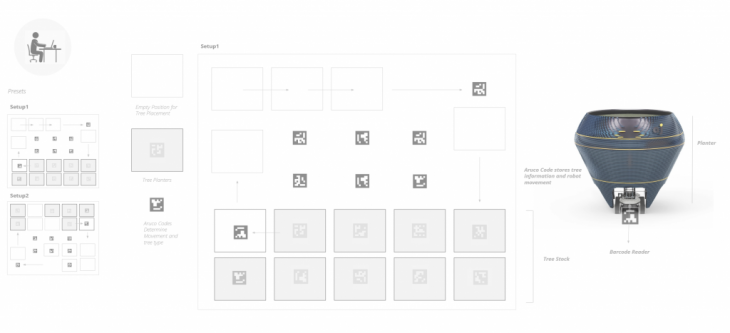
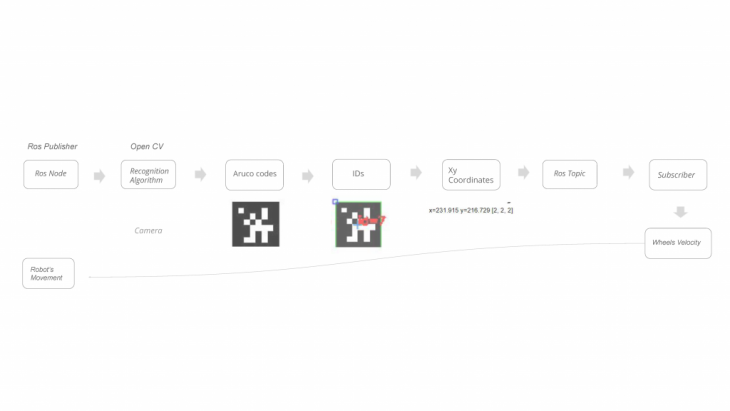
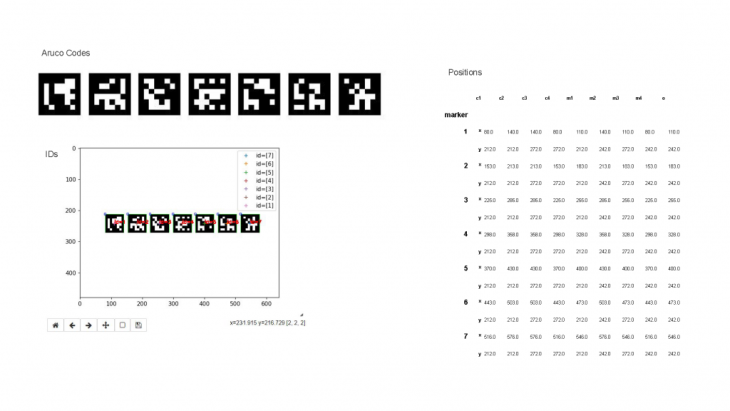
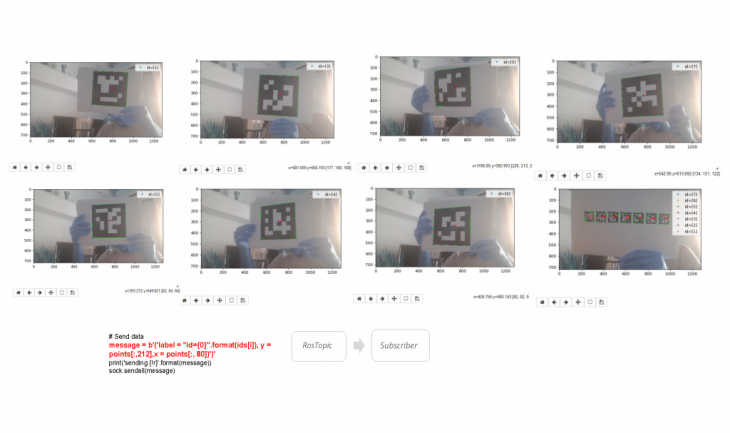
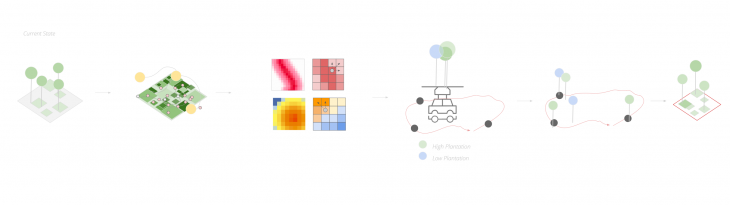
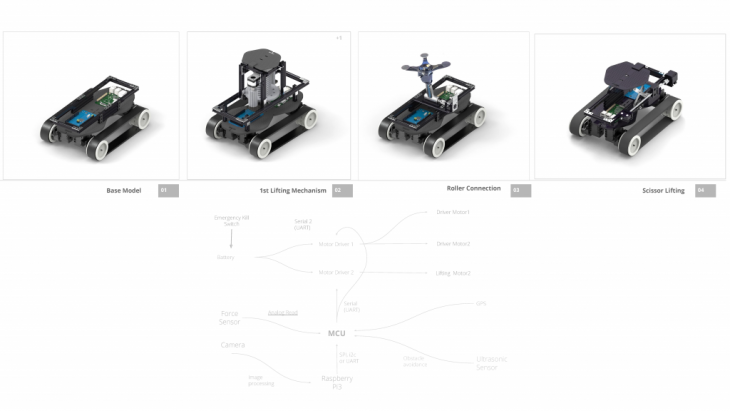
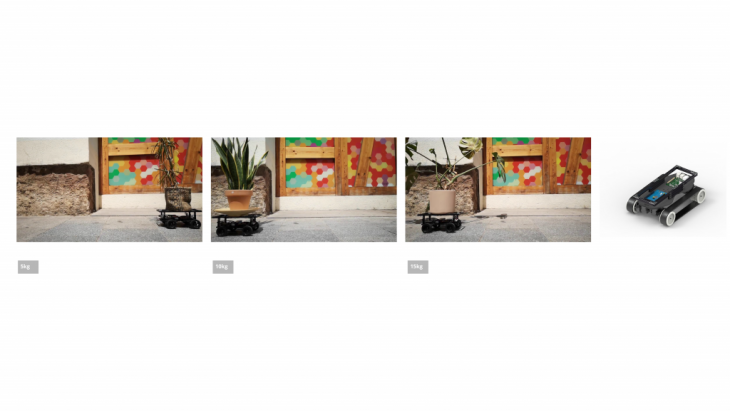
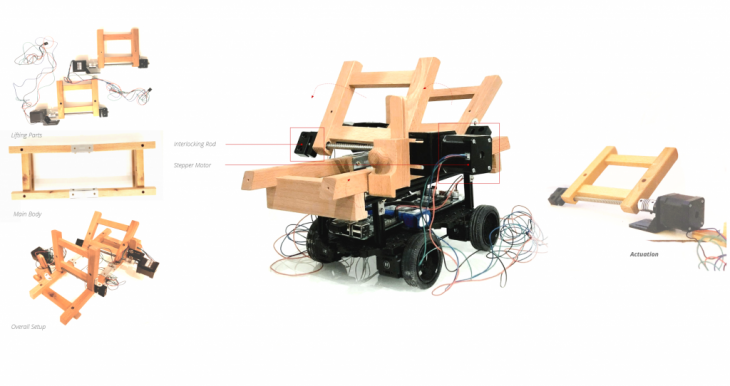
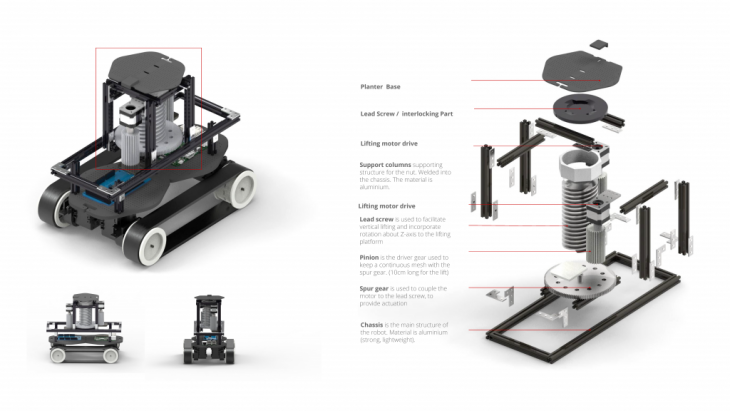
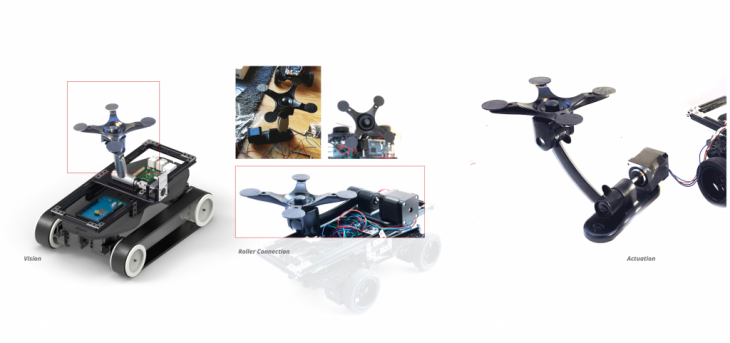
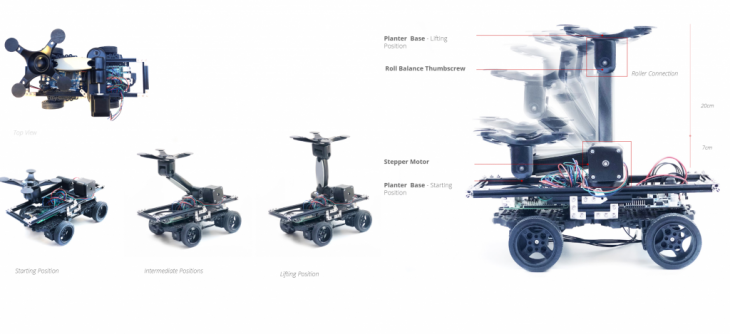
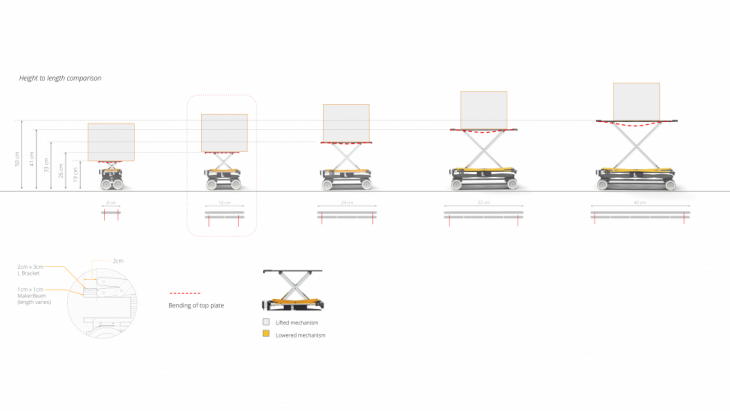
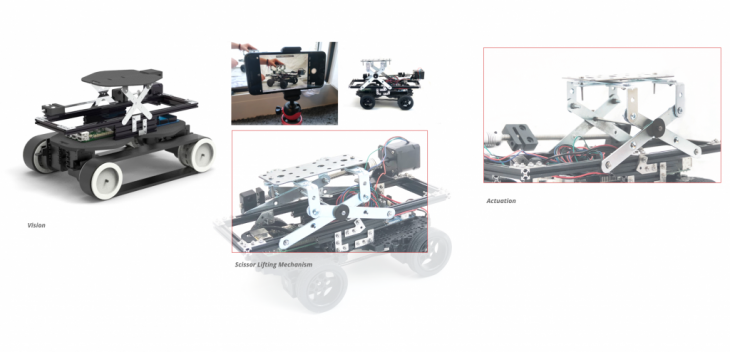
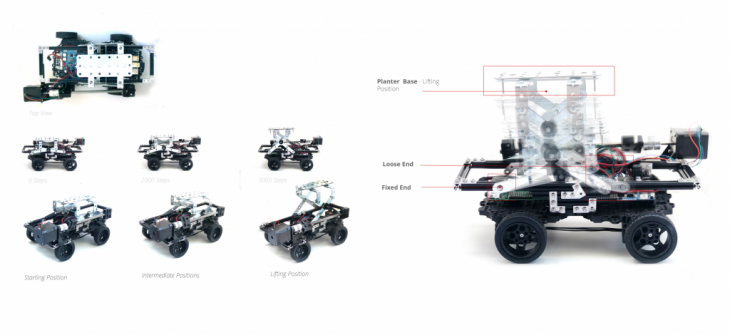
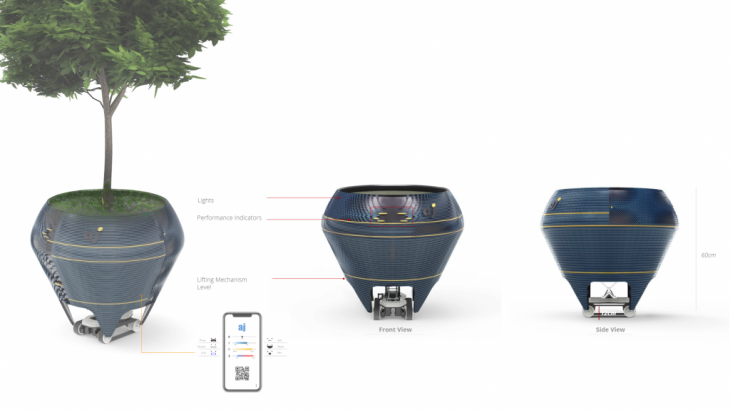
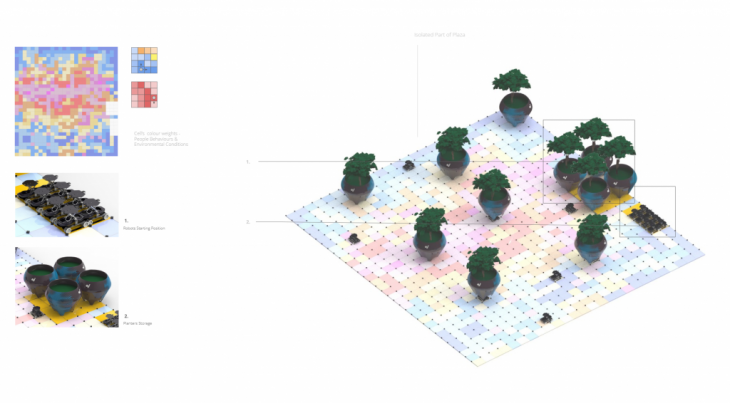
Robotic urban landscape is a project that has been developed to create dynamic spaces within the public realm. The goal is to create a systematic approach on how ground robots move various plants around a public square. In order to do that, we use computer vision to extract patterns of user’s behavior on the chosen area which is then cross referenced with insolation studies during certain periods of the day. The gathered data is translated into an agent-based system that regulates plant’s position in space and robot movement. For that purpose, a robot is built which was tested regarding its load bearing capabilities and velocity. In addition, various studies have been applied for a lifting mechanism which is needed to lift and move planters around the public area. This project is a vision of a future city where humans and machines can coexist and collaborate to enhance everyday activities.