Robotic Scanning
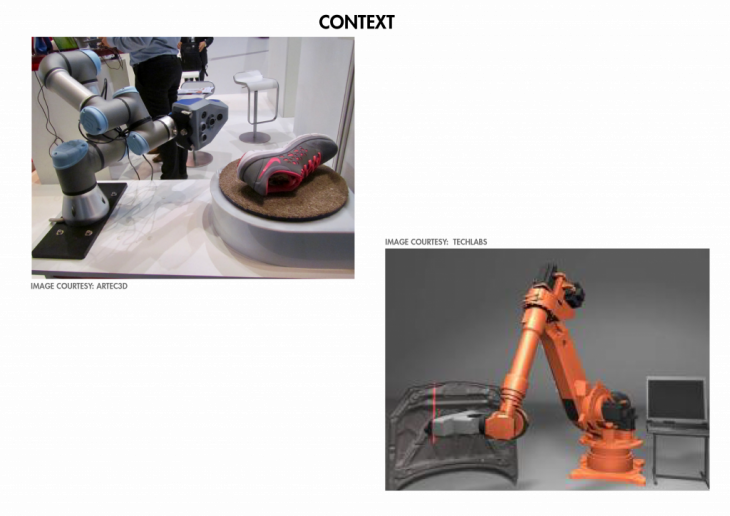
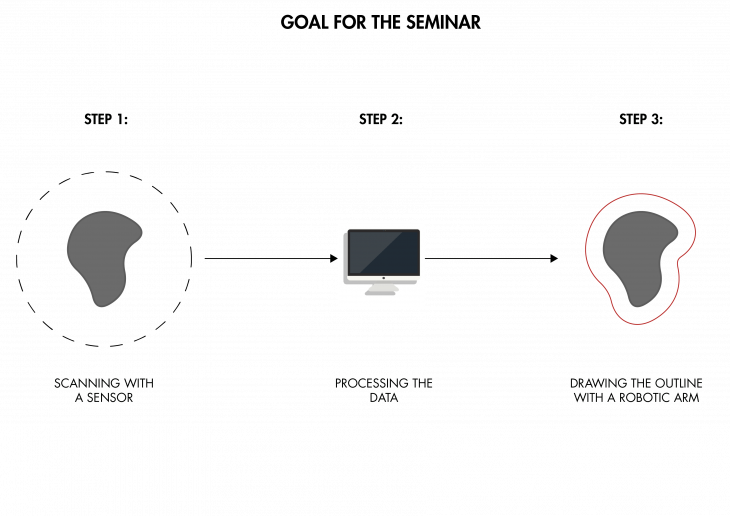
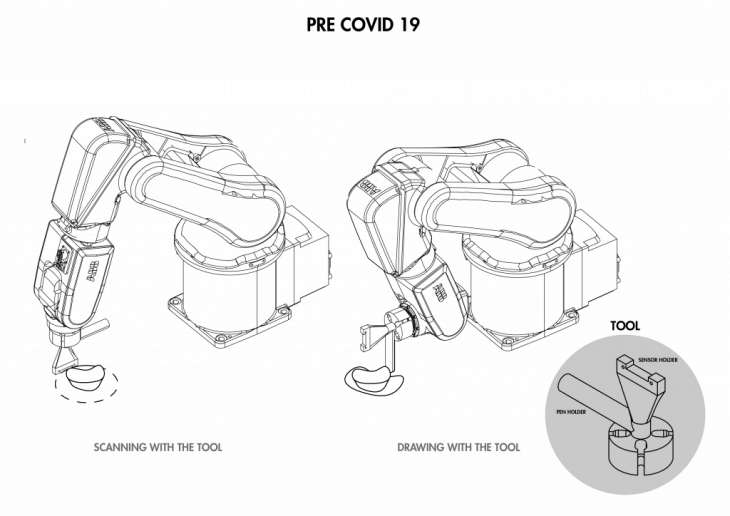
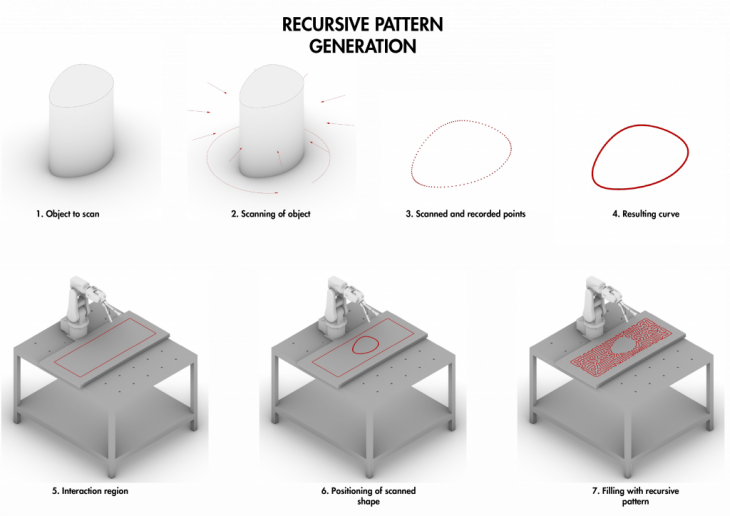
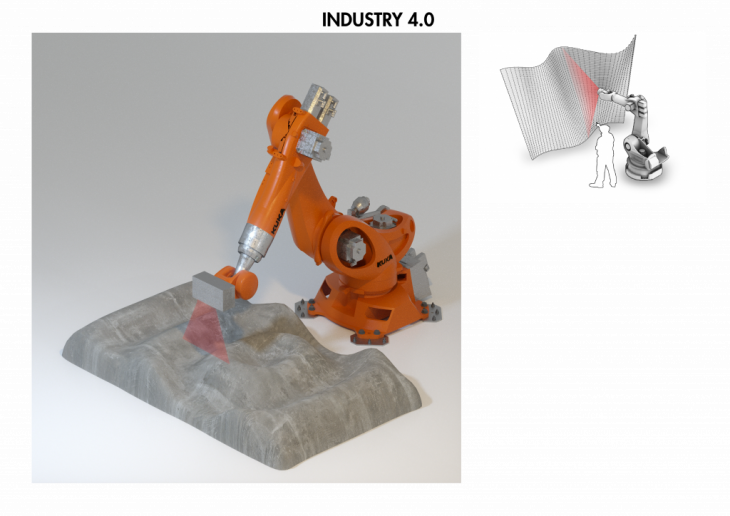
Robotic Scanning is an exercise where a robotic arm was used to scan an object and create a pattern according to objects’ dimensions. The initial idea was attaching a tool to the robotic arm to scan an object and draw a pattern according to data collected from it.
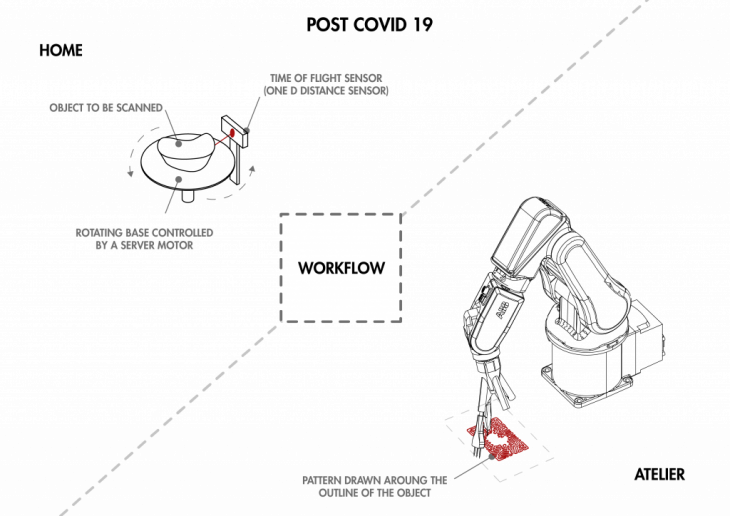
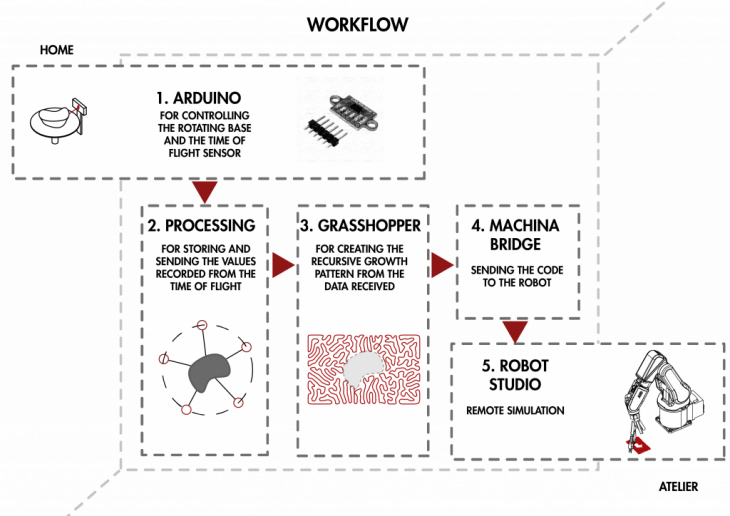
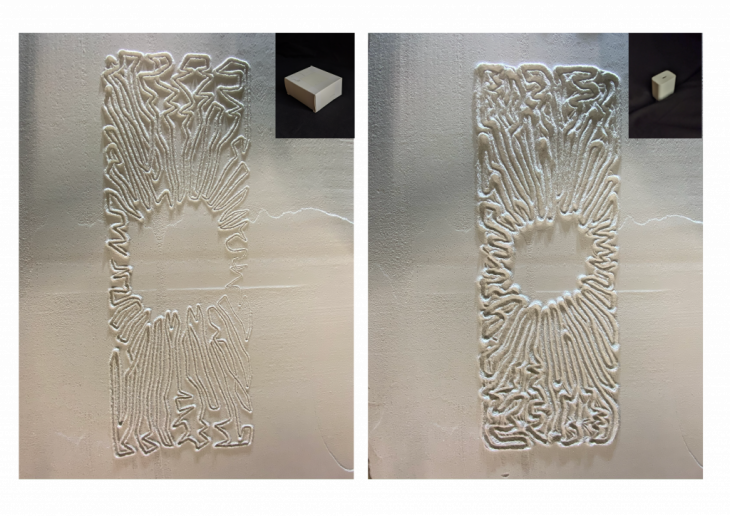
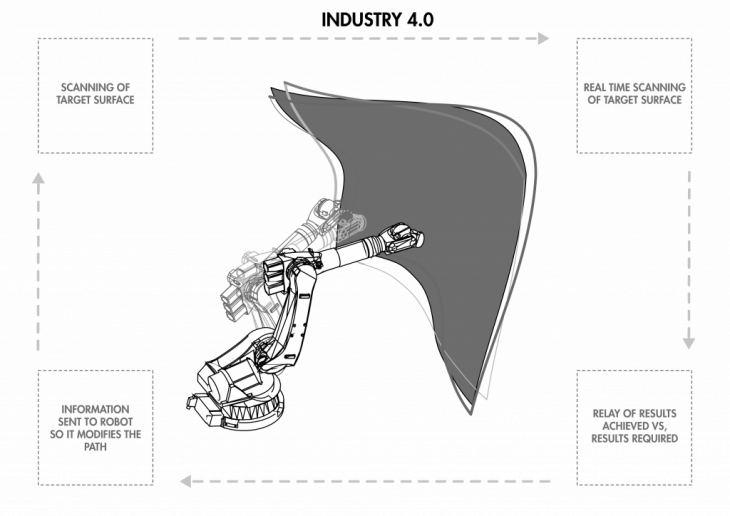
The approach of the exercise changed because of the Covid-19. Due to Covid-19, it was not possible to reach the robot physically but It was possible to control the robot remotely through Machina Bridge.A DYI homemade scanner was used to transfer data from our house to a robotic arm located in Iaac facilities. Multiple coding Softwares were used to automize the process. Just with a button that is pushed in our house was enough to scan the object, create the pattern, and send it to the robotic arm through Machina Bridge. A recursive growth algorithm was used in grasshopper that will generate unique patterns for every object scanned. The pattern was drawn to a sand bed with the help of a special tool attached to the robotic arm.
It was possible to see the robotic arm that is located in IaaC facilities through and IP camera. Also, the scanning process that was happening in our house was streamed through an IP camera as well. It made it possible for everyone to understand and see the process.
</p>


Robotic Fabrication is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Advanced Architecture, in 2019/2020 by:
Students: Ankita Alessandra Bob, Ivan Marchuk,Yi?italp Behram,Yimeng Wei
Faculty:Alexandre Dubor,Kunaljit Singh Chadha,Angel Muñoz
