ROBOTIC AND MIXED REALITY
with
Prof. Roland Snooks & Natalie Alima
CONTEXT
The workshop was about the connection between real-time fabricating robotics, the argumented reality for assembly, reinforcement of structures and agent-based self-organizing structures.
TEAM FABRICATION


Fabrication and assembly are essential for the process to be reinforced.
The key challenge was to find the right values for printing with a Pelletextruder from WASP for PETG, such as flow rate of the material, extrusion temperature, and printing speed. The transparent PETG-pieces should have the best visual properties, a constant width, and layer height and acceptable fabrication time.
REINFORCEMENT TEAM
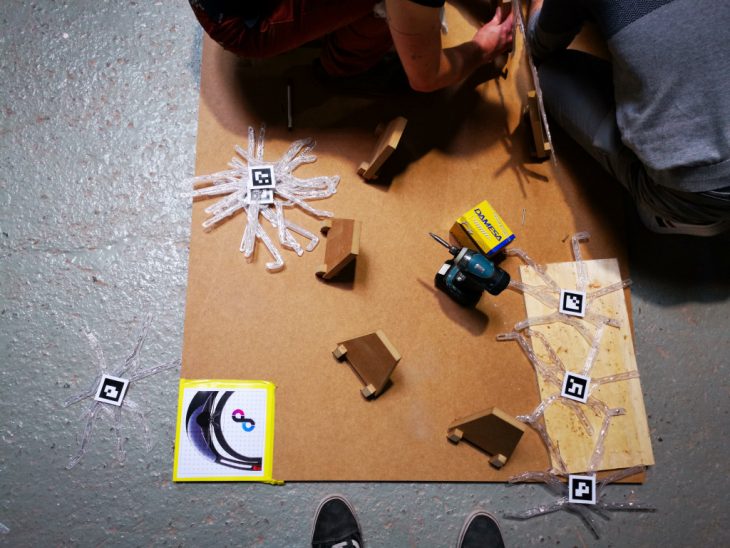
As part of the reinforcement team, we were tasked with generating a toolpath for the robot to reinforce the geometry by printing along the stress lines of the model. This would ensure structural stability. Owing to the complicated nature of the geometry, the Hololens was used to help visualize and identify the path along which the robot would print. An Aruco marker was positioned on the points along the path and using the Hololens the points were tagged and feed into the grasshopper simulation. These points then became a polyline which became the toolpath for the extruder to move along.
The key challenges the team had to overcome to print were:
- Ensuring no error between the point tagged by the Aruco marker into the virtual space and the physical space.
- Localize the model and space into the robot environment.
- Ensuring sufficient points to translate into a smooth curve for the robot to print.
- ensuring the 3d dimensional path generated was collision-free.
TESTS:
2D SURFACE TEST:
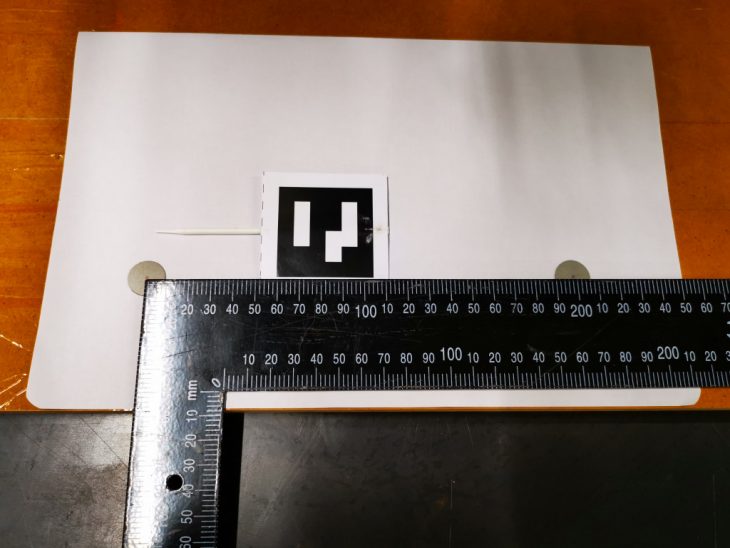

The first test involved check the data inputted by the Hololens and the Grasshopper environment. A large board of known dimensions was taken and random points were marked over it. These points were mapped by their distances from each other and the edge of the board. An Aruco marker flag was placed on each of these points and tagged using a hololens. The hololens plugin for grasshopper, Fologram, converted these tags into points within the Rhino model space. These points were mapped with near perfect accuracy into the model space thus reaffirming the ability of hololens to map the points accurately. These tagged points were fed into the Kuka Prc to create the robotic toolpath for the extruder to print on.
3D SURFACE TEST:
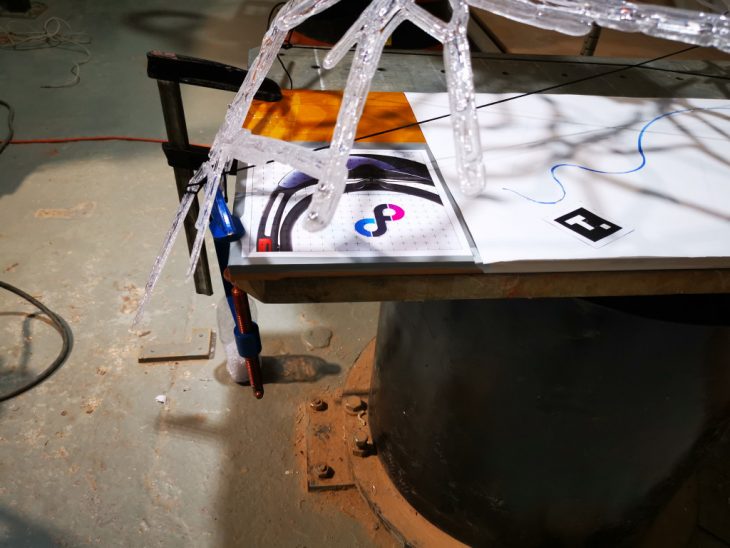
With the success of the 2d test, a more comprehensive 3d surface was generated with points marked on the space and the same test was repeated to check for the smooth printing on a 3d surface. This test was mainly configured to check for collisions and the smooth movement of the robotic arm.
CONCLUSION

The direct communication between pathgeneration and robotic movement is a good improvement for a faster production and an important tool in sense of path correction. In case of 3D-printing the right tool and the right material according to the needs of the project are mandatory . A sensor feedback could also be a big advantage to detect and correct over or under-extrusion or other possible problems occur in 3D-printing.
___________________________________________________________________________________________
Workshop 3A | MRAC 2018-2019
Faculty: Roland Snooks
Faculty assistants: Natalie Alima | Kunaljit Chadha
Student: Owaze Ansari