Path planning
 52% of the time is wasted in material handling on construction site
52% of the time is wasted in material handling on construction site
Main goal of this project is propose automated assistance in construction sites with rovers.
Rovers generate horizontal connections in construction sites combining with vertical transportation (cranes and lifts) creating a tridimensional grid to provide materials and tools just in time.
Idea
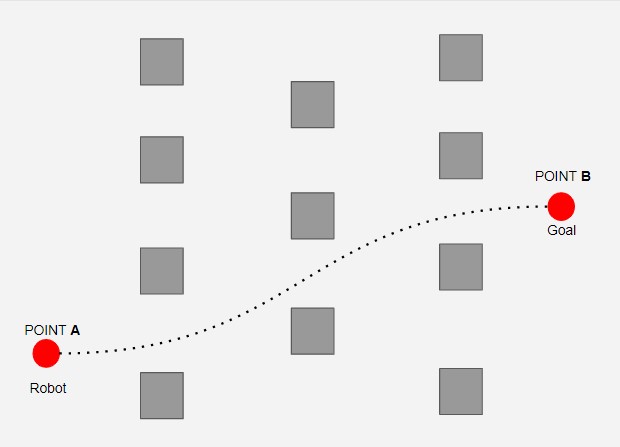
Goal : Reach final position with self learning by taking shortest path and minimum time
Find the optimal path to reach from one point to the other avoiding fixed obstacles using only proximity sensors (no cameras, no lidar)
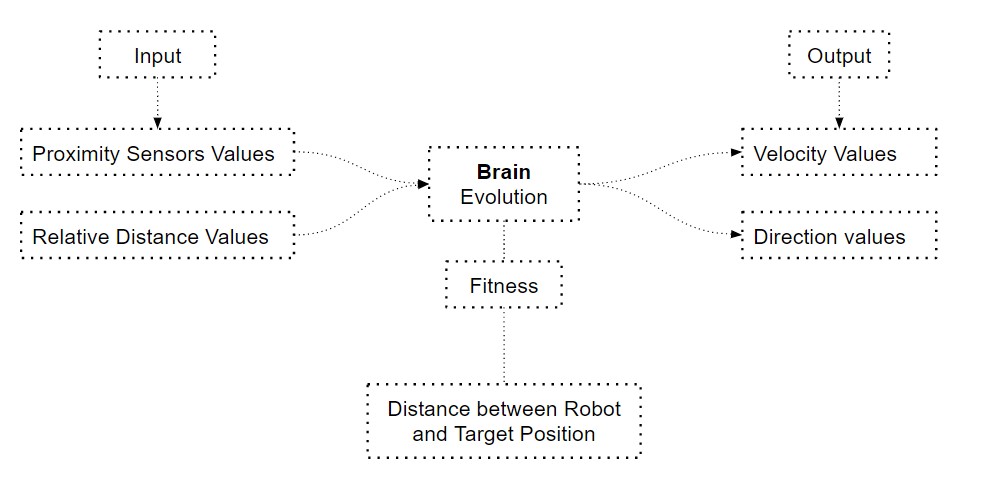
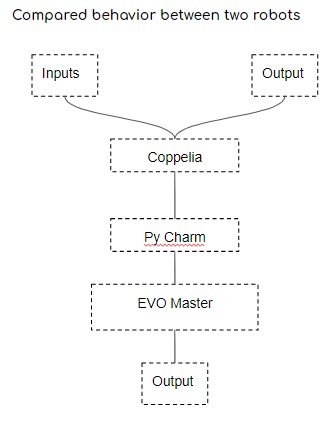
Inputs and outputs of the system
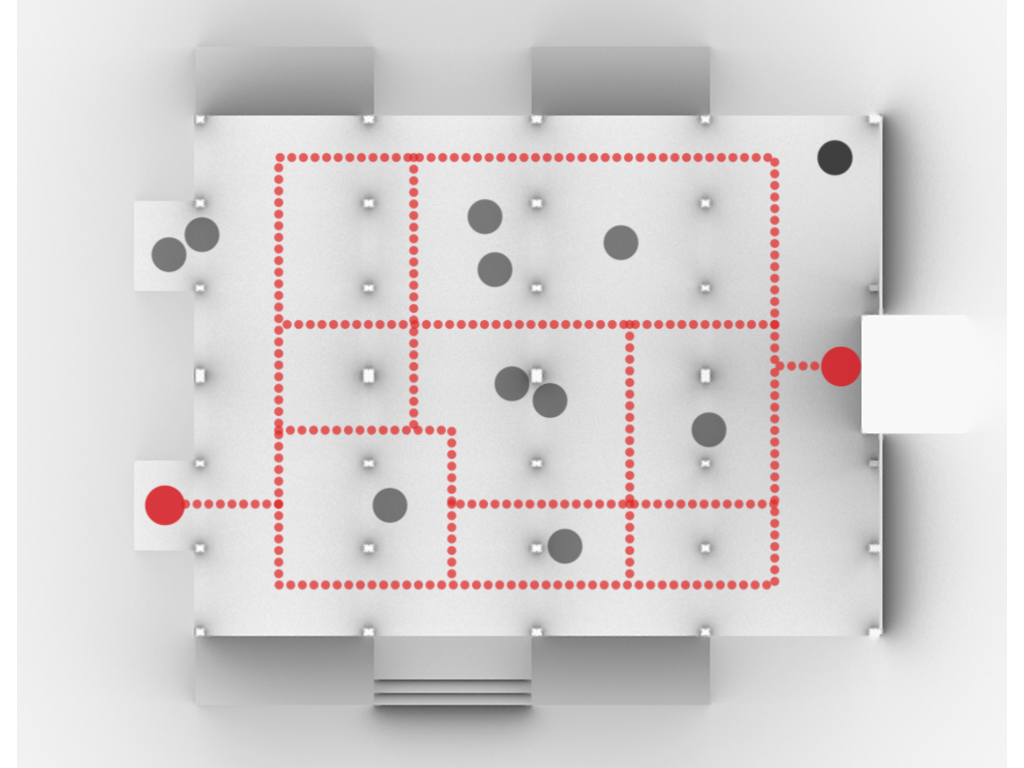
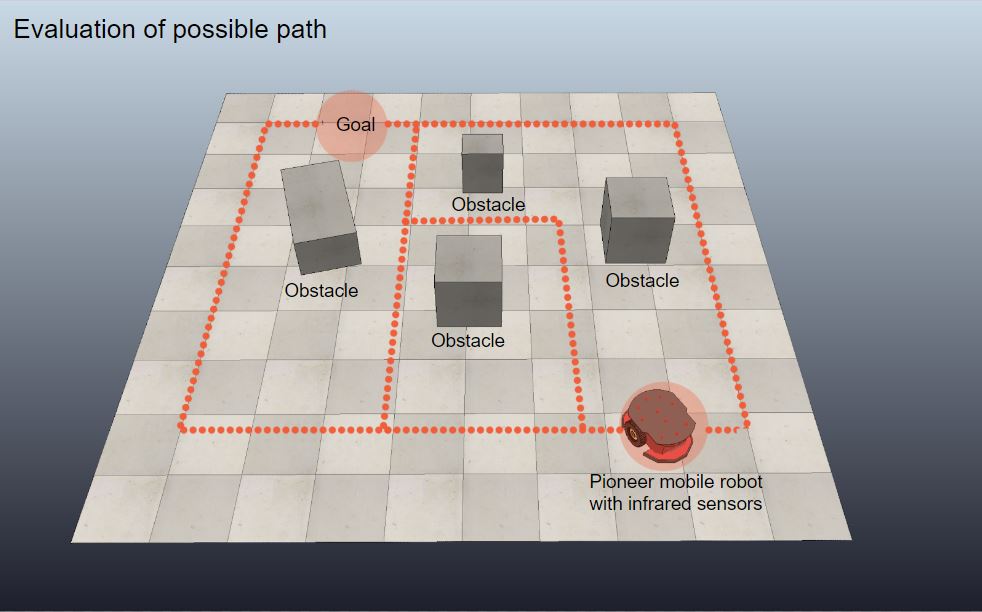
Simulation
Robot : Pioneer Sensors: 16 Goal: Obstacle Avoidance with shortest distance
During simulation, robot is not pre-trained with map, sensors are the only feedback it has to understand the space and to find the goal. This approach is very interesting , because the amount of data collected to navigate is significatively less comparing with use of Lidar or cameras. Also with this setup, robot avoid to be trained in every new location , discovering itself the path
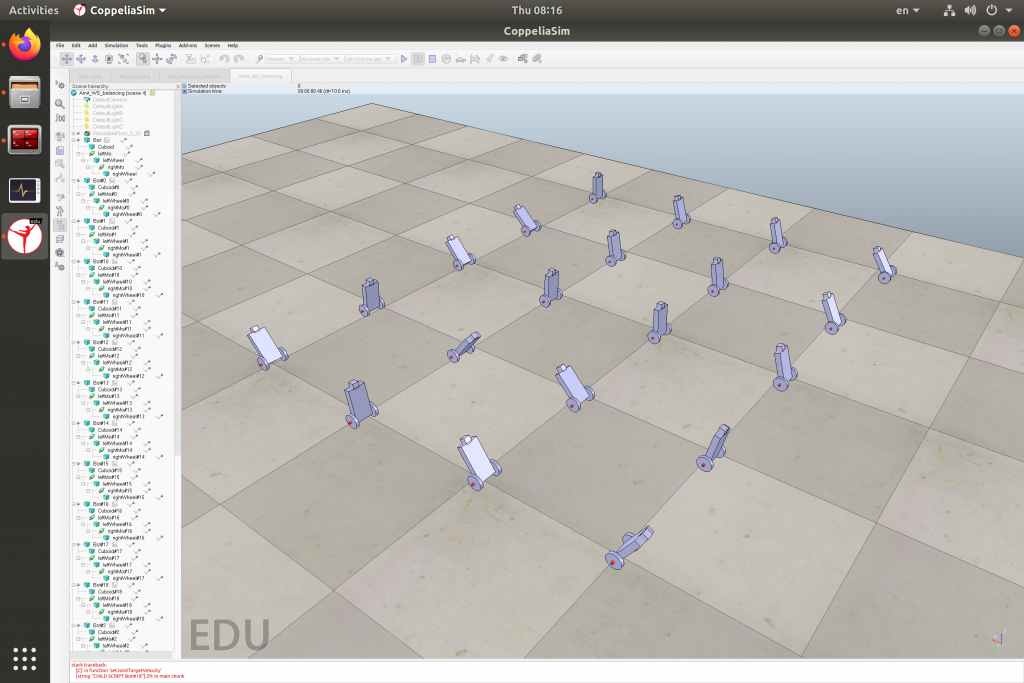
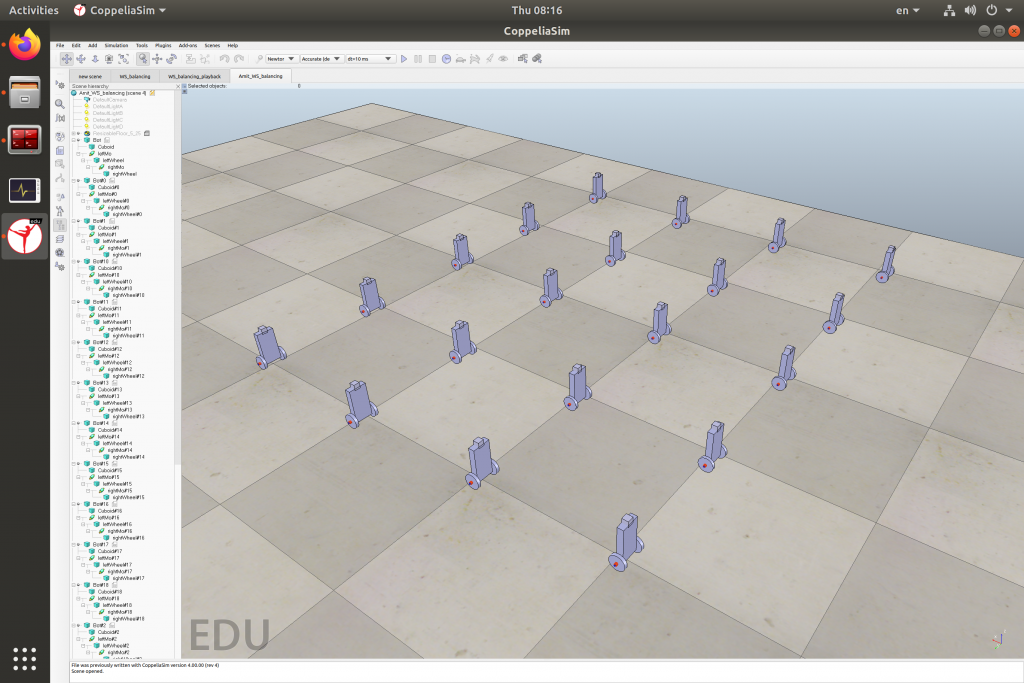
Tutorials
Running simulation in CoppeliaSim, is possible to appreciate difference between two wheeled unstable robots before and after running EvoMaster, Before, robot can’t reach erected position by itself. After the training, robot learn how to balance to get a stable position . This situation keeps meanwhile EvoMaster is running
Path planning is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Robotics and Advanced Construction 2019/2020 by: Students: Amit Pattar, Mansoor Awais, Isabel Cousseau Faculty: Raimund Krenmueller, Soroush Garivani