WORKSHOP 1.2: PRINT & CAST // BEAM DESIGN
During this 1 week workshop, MRAC 01 students split into two teams to design a beam structure and a column structure using the KUKA robot to 3d print molds using PETG and then cast concrete. This team focused on the beam design.
MRAC Co-Director Aldo Sollazzo lead this workshop along with YIP Structural Engineer Manja Van de Worp, connected remotely.
During the week, Soroush Garivani introduced PolyFrame, a plugin for Rhino which the team used in the form-finding process and Manja introduced Karamba 3D, a plugin for grasshopper which the team used to extract a structural analysis of the design to be built accordingly.
The project is still ongoing. Stay tuned for the final result!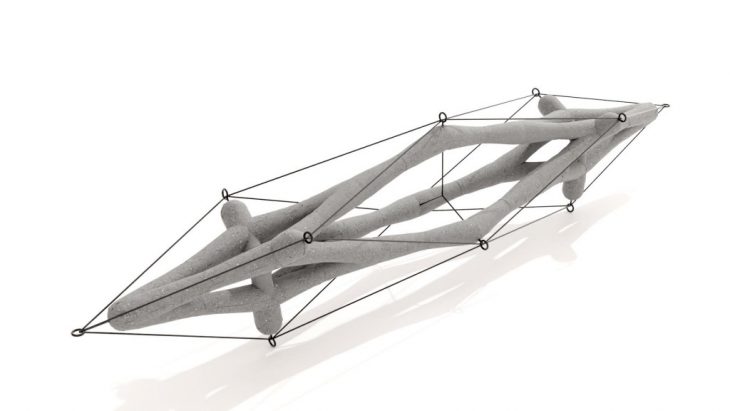
Beam Redesigned
PolyFrame

Form Finding
Using PolyFrame, the team played with a grasshopper script to extract a geometry that focused around a branching system strategy that is eventually mirrored. This helped control and anticipate some aspects of the structural analysis before testing with Karamba 3D.
Karamba 3d Analysis
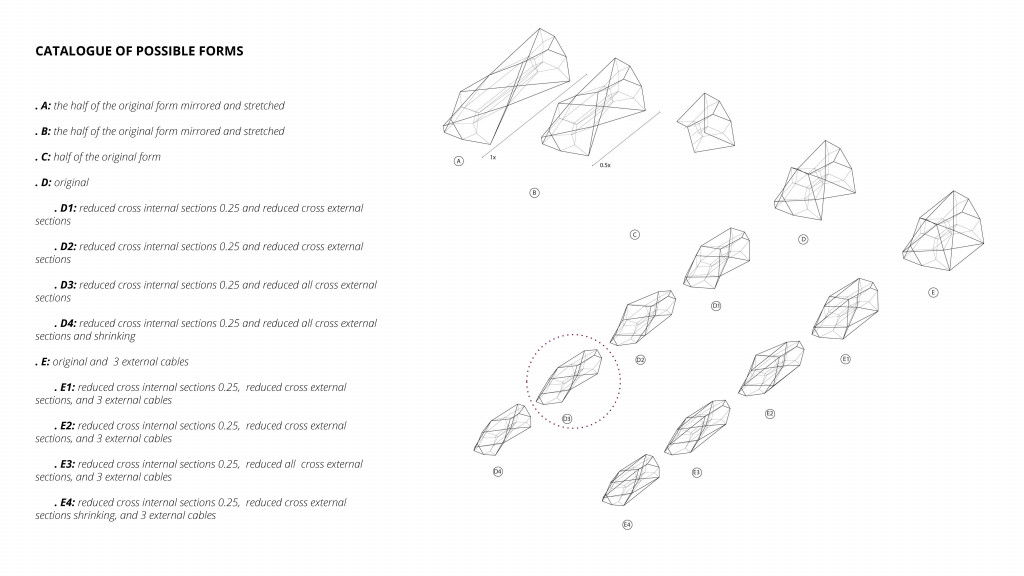
Catalogue of Explorations
After several iterations, one force diagram was chosen to proceed to the next stage. Using Karamba 3D, the team was able to extract a structural analysis of the element.
01. First Model
The first model is a structural analysis from the polyframe form-finding result. The structure’s size at this point is 1.52 meters wide, 1.72 meters high and 5.16 meters long. The structural analysis considers 2 support points and 2 load points of 75 kg each. For the pretension equilibrium, 5 millimiter per meter tension is considered.
In this case, the analysis shows the central struts in tension.

02. First Optimization
After the first analysis, the new iteration considers a change in the proportion of size. This structure now fits in a box 2 meters long, 0.33 meters high and 0.24 meters wide. In this case, the structural analysis considers a pretension of 1 millimiter per meter and also 2 point loads of 75 kg each. It also mantains the two points of supports. This case also shows the central struts under tension.
03. Final Model
The final model is the third iteration of the structure analysis and consider some changes between the structural parts. At the ends of the structure the struts and cables are connected at one point. The support struts connected with the other 2 struts from the transverse plane and in addition, in the center the central structure was changed from struts to cables to improve the performance of the entire structure. This structure works with a pretension of 5 milimiters per meter and it works with loads of 200 Kg.
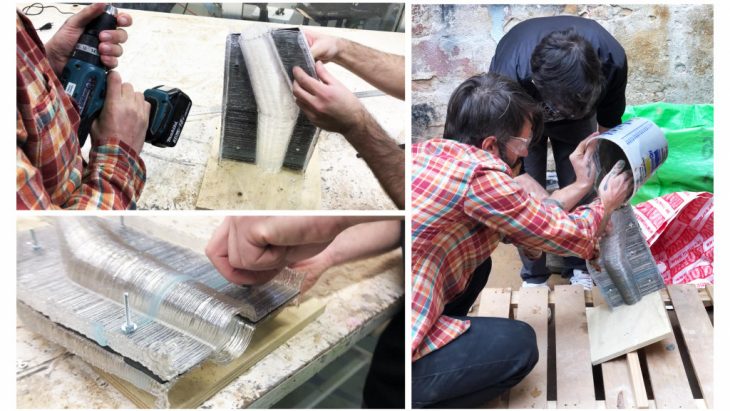
Printing with KUKA
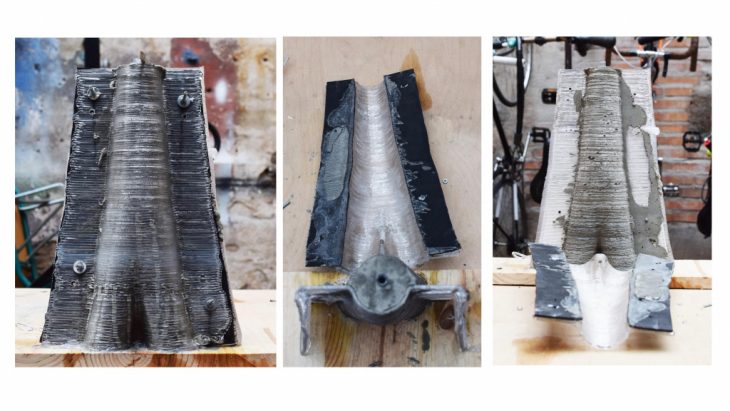
After the team designed the components with PolyFrame and tested the structure with Karamba 3D, they proceeded to extract molds for each piece. Some were simple and only had 2-part molds and some were more complicated and had 4 to 5 parts. The printing was done using PETG material, the KUKA PRC plugin for grasshopper to design the toolpaths for each mold and a KUKA KR 150 robot with an extruder as an end effector.

Connection Explorations
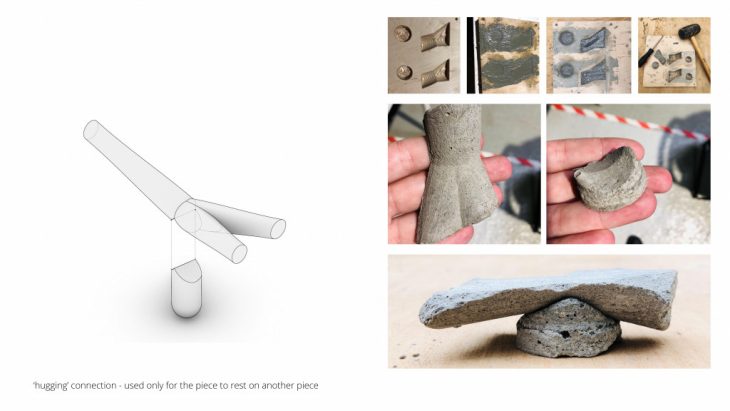
The issue of connecting the pieces was worthy of an exploration by the team. Although a ‘male / female’ connection system (below) would seem like the obvious choice, some parts of the beam were too complex to be connected this way and the team chose to apply a ‘hug’ connection type (above) where the concrete elements would simply rest on one another and the external cables would hold them firmly into place.

Molds & Casts
</p>
WORKSHOP 1.2: PRINT & CAST // BEAM DESIGN is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction Workshop 1.2 in 2020/2021 by:
Team: Juan Eduardo Ojeda, Aslinur Taskin, Orestis Pavlidis, Helena Homsi and Michael DiCarlo
Faculty: Manja Van De Worp, Aldo Sollazzo
Faculty Assistant: Soroush Garivani, Mansoor Awais
Workshop Participants:
Shahar Abelson, Hendrik Benz, Alberto Eugenio Browne Cruz, Charngshin Chen, Michael DiCarlo, Helena Homsi, Arpan Mathe, Juan Eduardo Ojeda Valenzuela, Orestis Pavlidis, Aslinur Taskin
