Concept
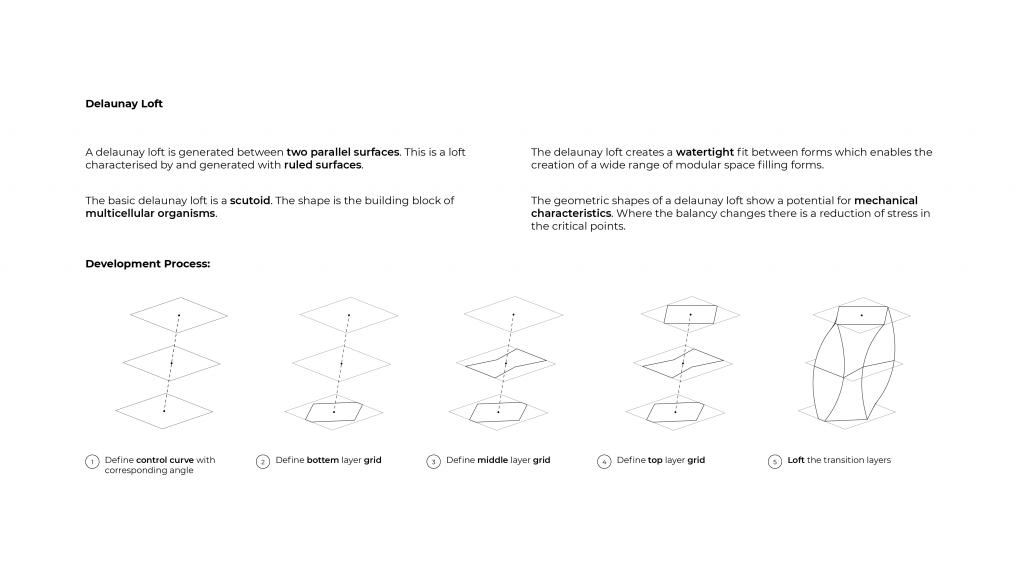
Geometric Exploration
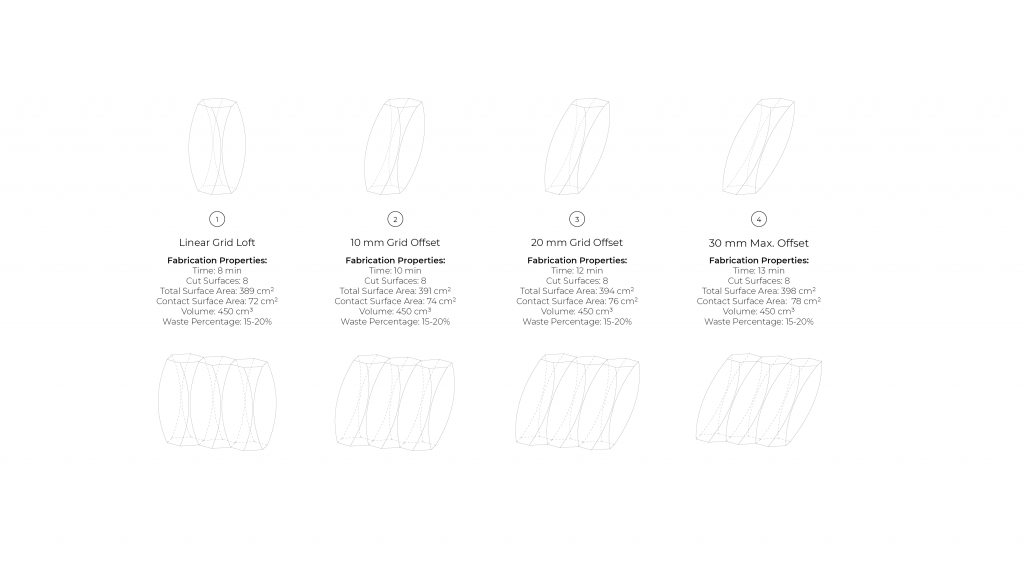
The next step in the development of the project is the study of the different goniometric iterations. After the realization of these shapes with the robot, we analyze the different qualities that each shape offers. The loft between the three different grids generates different concave and convex shapes.
These have specific qualities but are very difficult or impossible to manufacture with the robot. This is because the end-effector has to be perpendicular to the robot’s y-axis, which results in a crash.A specific quality we are investigating is the interlocking of the form to create a stable unit. 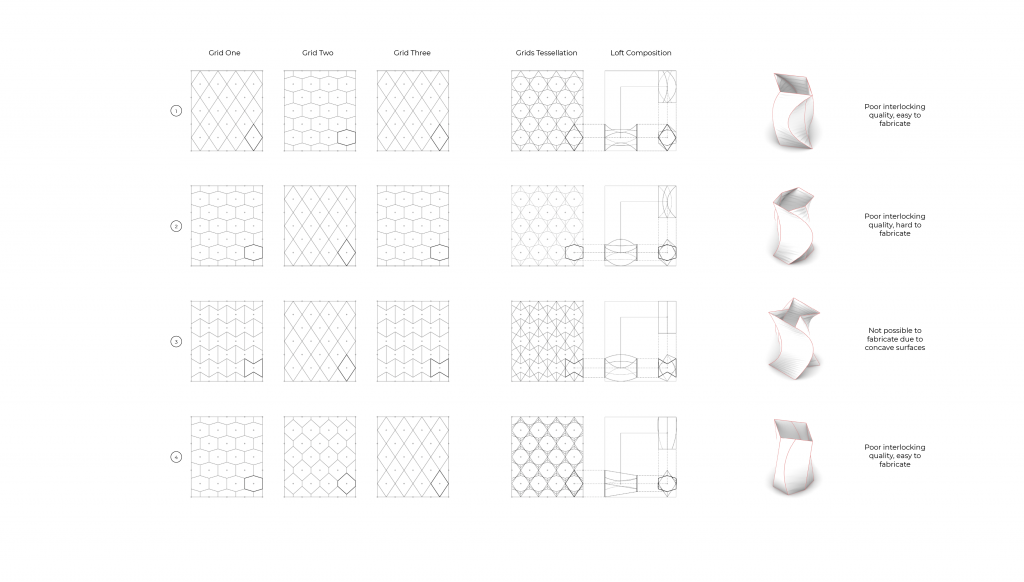
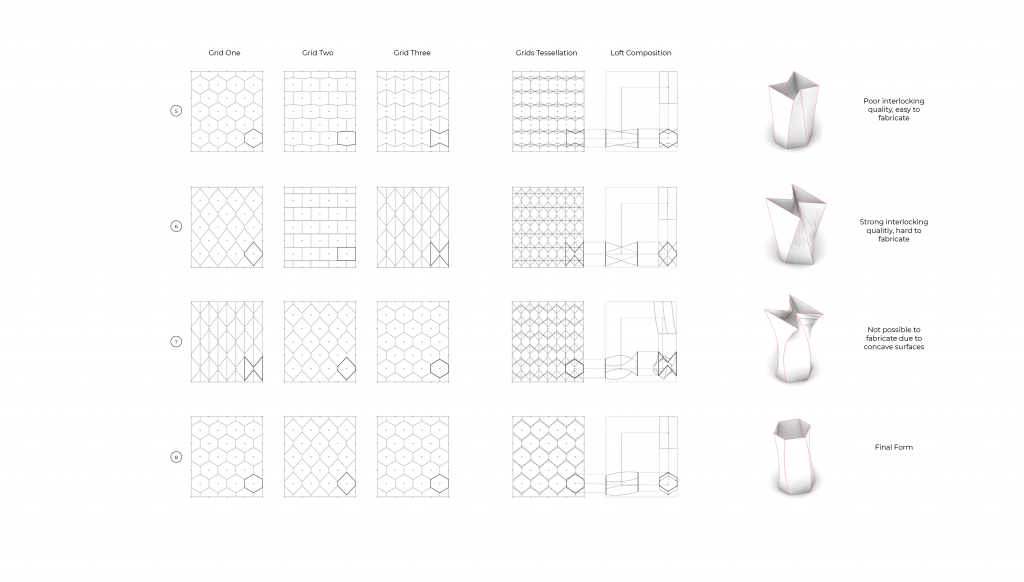
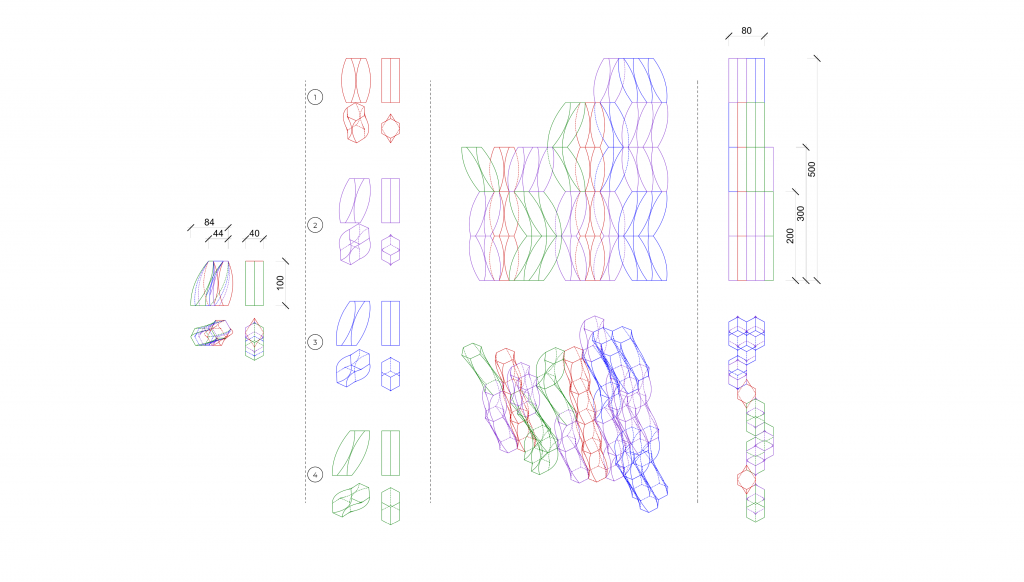
Final Module
After the analysis and study of the possibilities, the final form was developed. This form consists of a loft between a hexagon a rhombus and back to a hexagon. The hexagonal end makes it possible to stack the form in different orientations. The loft to a central rhombus generates a maximum contact surface. This makes for a module that is stackable in three dimensions and has an optimal interlock for stability.
Finally, the grid is displaced in the surface which generates a shear. The more the grid shifts, the more the contact surface between the components increases. This results in a greater range between modules with higher collective stability.
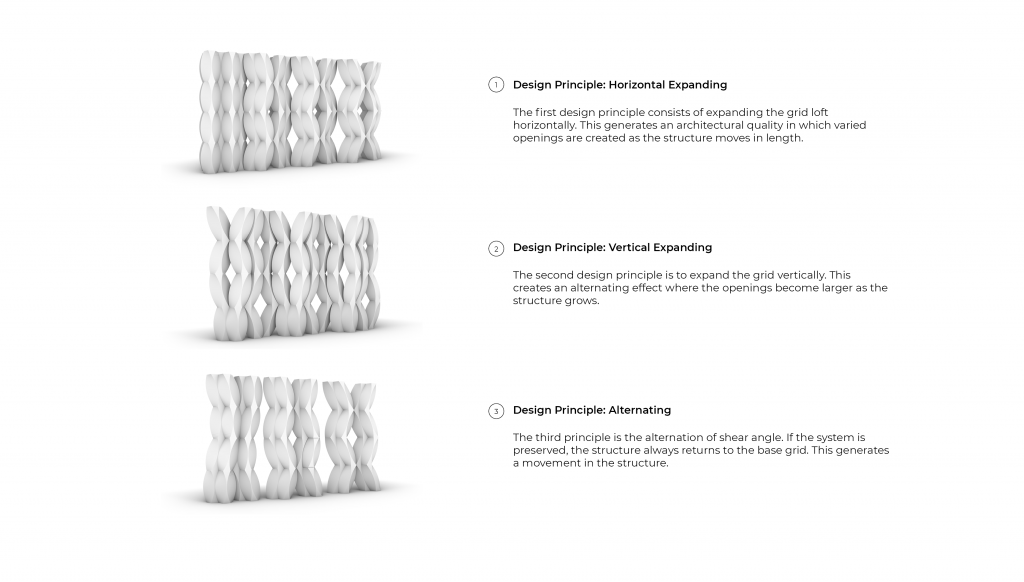
Design Principles
The development of the module makes it possible to follow a number of design strategies. These different strategies can be combined to achieve different architectural qualities. These include opening a façade or pillar system that transitions from an open to a closed surface.
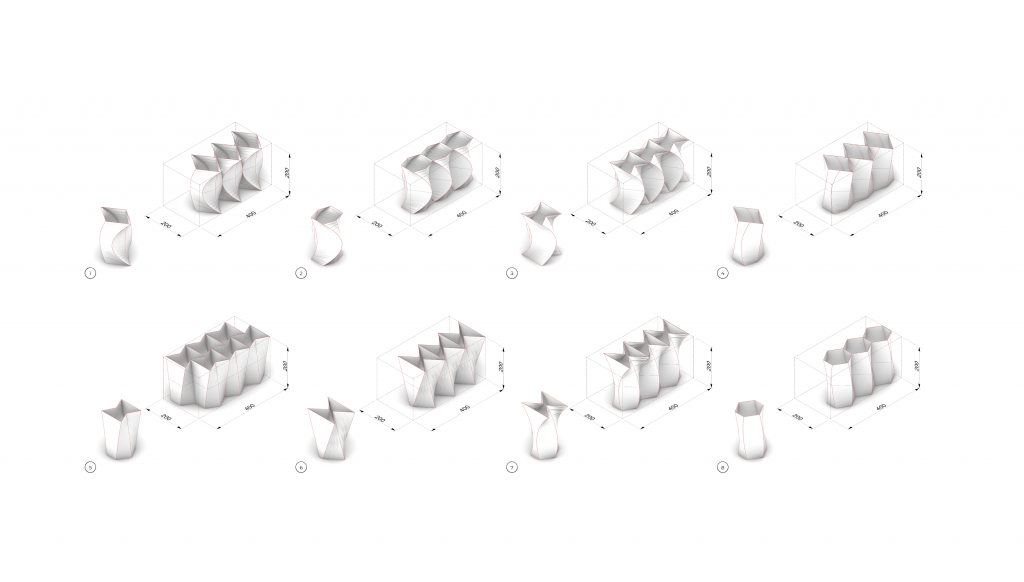
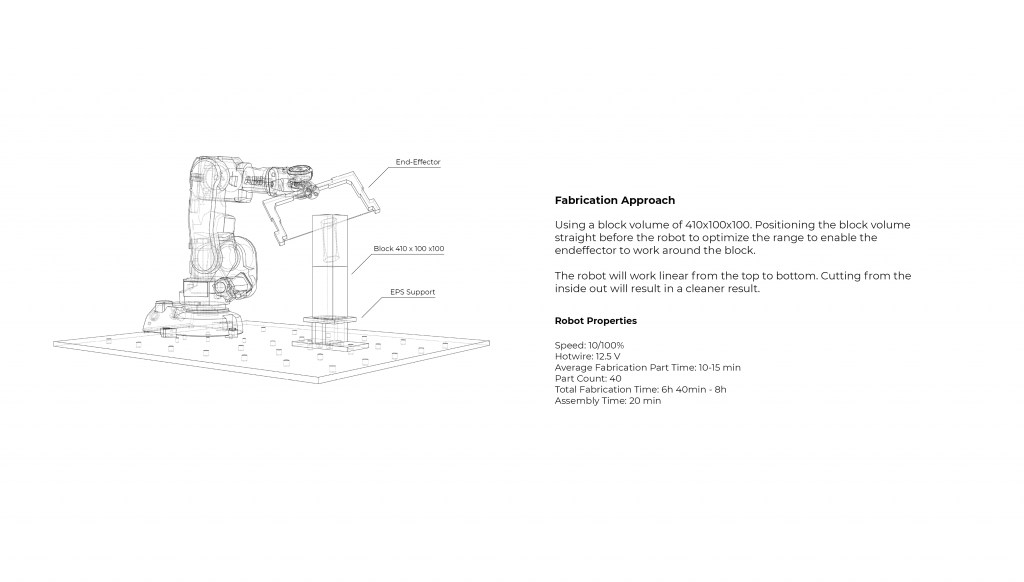
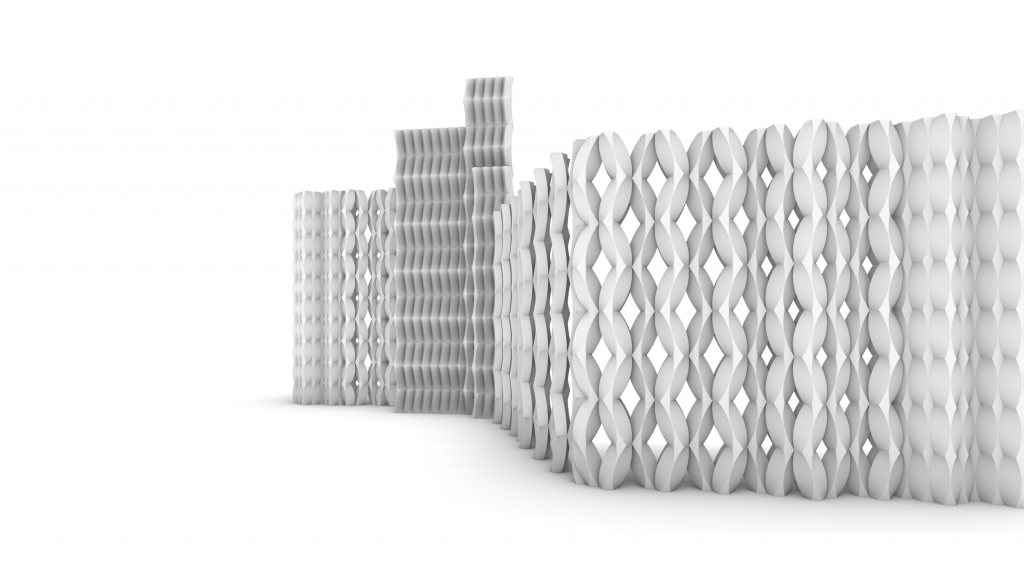
Fabrication Model
In the final robot fabrication, four iterations of the module were accomplished. With this, a composition was made that goes from open to closed over the length and is alternating in the type of module.
Fabrication Strategy
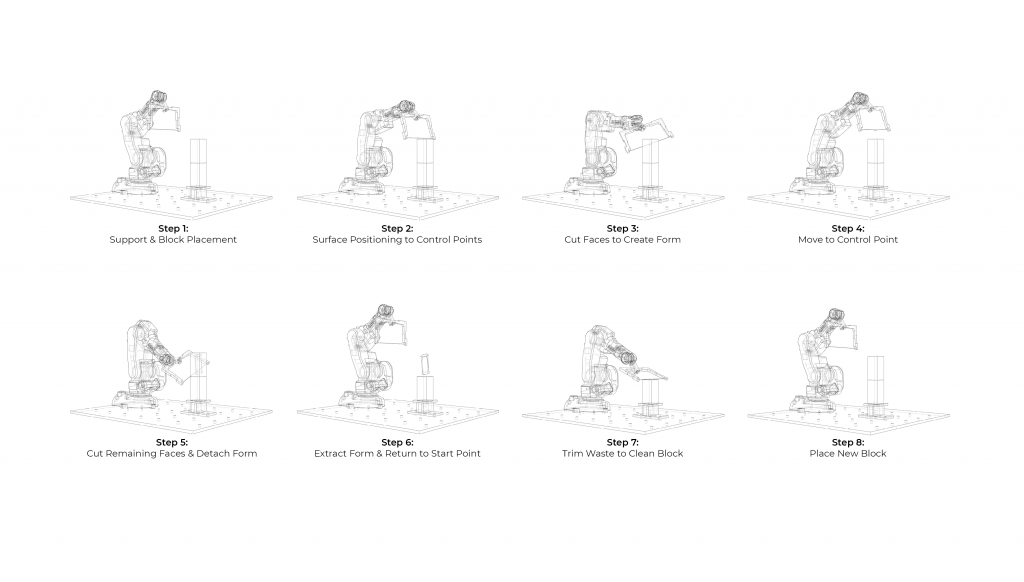

Design Proposal


</p>
Modular Stereotomy – Advanced Robotic Fabrication is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Advanced Architecture 2020/21 by students: Alexander Dommershausen & Iulia Lichwar
and faculty: Alexandre Dubor & Ricardo Mayor and faculty Assistants: Ilaena Napier & Madhavi Ojha
