Introduction
Physical Computing is an approach to learning how humans communicate through computers that starts by considering how humans express themselves physically. For this course, we take the human body as a component, and attempt to design within the limits of its expression. This takes a hands-on approach, for which we built circuits, soldered, wrote programs, and built structures to hold sensors and controls, and figuring out how best to make all of these things relate to a person’s expression and movement.
We tried to build an interactive system by using software and hardware that can sense and respond back. Therefore, our approach in this design was trying to make an interactive panel that is untestable, enjoyable and useful in some aspect, for everyone.
In the beginning, we needed to aquire the knowledge and be comfortable with the following:
– What an “if” statement is, and how to use one.
– What variables are in a computer program, and how they’re used.
– What a repeat loop is, and how to use them.
This scenario is about how movement and interaction are supposed to reveal the concept of how you see yourself within the city.
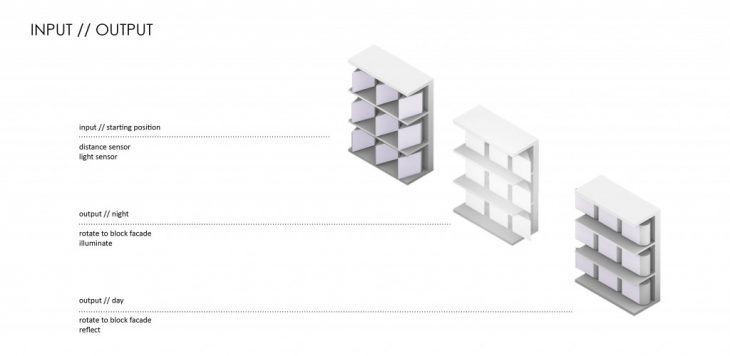
The Input and Output Diagram
Creating an interaction that depends on moving when you move, which was the initial scenario designed for us. Our idea was to create a façade with two sided panels, in one side we used mirror and the other side a translucent material (which in our design is an acrylic sheet), and behind the sheet we used LED strips so as the distance decreases (in our case we used Ultrasonic senor) it turns 90 degree to one side at night or when there is no light. During the day as the distance to the panels decreases it will turn 90 degree (clockwise), so the person in front can see him or herself in the mirror.
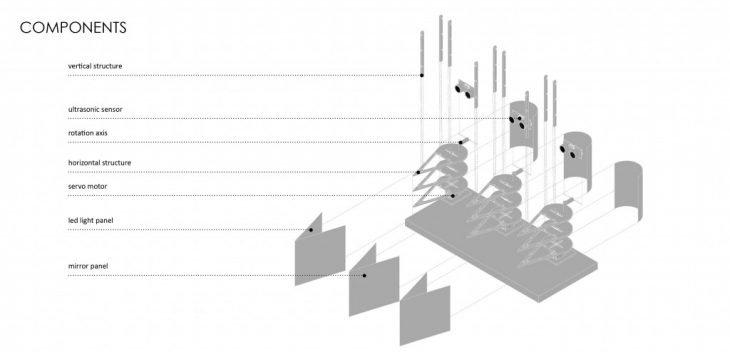
The Isometric Diagram
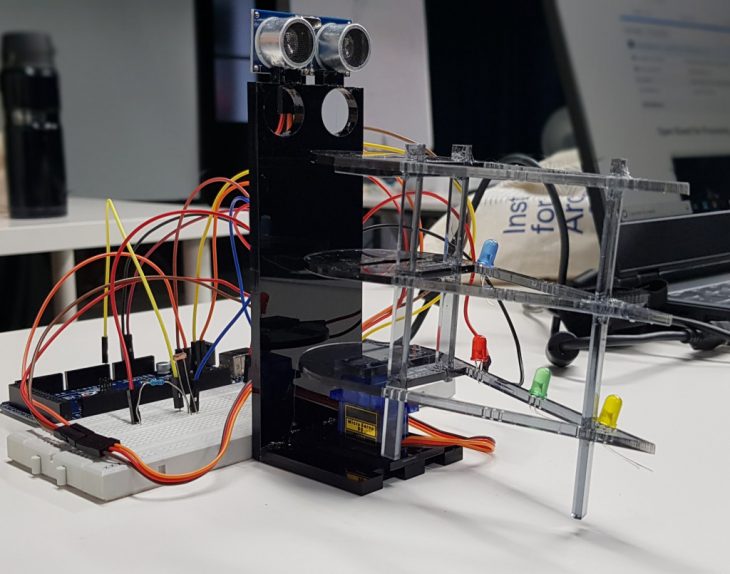
In Mirror Match, which is manipulation of privacy, we used Servo motors. They are interesting kind of motors; with less than 1 amp of power consumptions you can end up with versatile angular movements. In favor of time, budget and the lack of trusted fabricators, the decision was made to use of servos, with the standard tilting brackets.
 Day Render
Day Render
 Night Render
Night Render
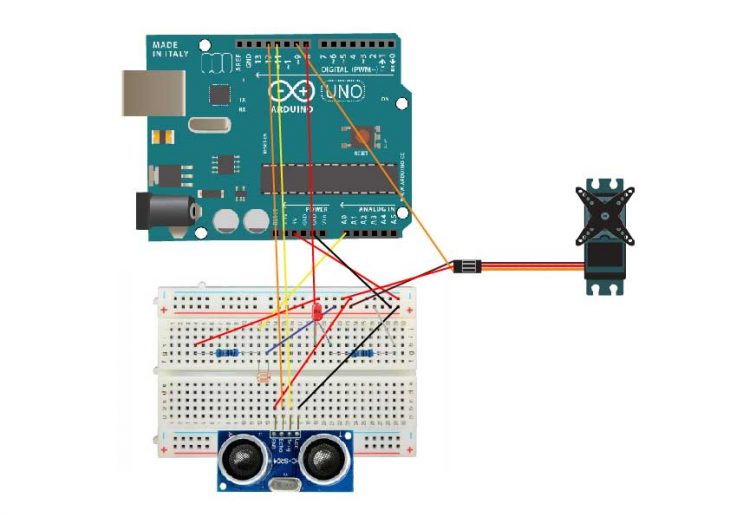 The Circuit
The Circuit