The third semester was the continuation of the second one. After reviewing our mistakes and finding new goals, we started by changing the way how we weld plastics. We decided to keep the same principals it means being able to produce a walking robot with low-cost materials and by low-tech machines.
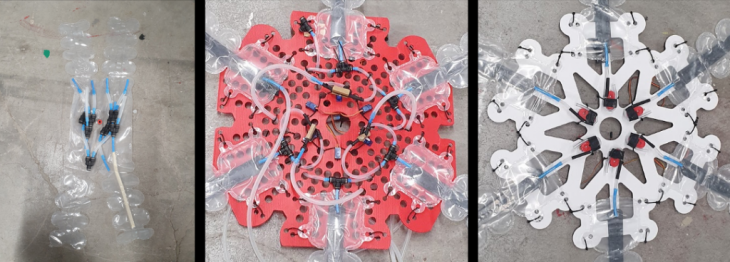
One of the big things for this project was to build legs that are correctly sealed and can handle robots weight. To achieve that, we decided to reinvent the way we did it before. After many samples, we designed pattern, similar to the original welding patterns, that perfectly glued our layers of plastic bags. This way we got a very nice sealing for legs. By adding stiff span on top we changed the way how to bend and straighten the leg. Now the pressure has to only bend it when the span is straightening it after pressure is released.

The pressure is now controlled by 6 servos, one per leg. It gives us a lot of freedom to control the walking process. The whole system is now supplied by one pipe connected from compressor to the distributing chamber

The board was designed to be lightweight and susceptible to changes during assembling. One thing that we discovered after the first try is that not weight but stiffness are crucial for the board. This is one of the things to improve in the next generation.

Other things to improve are walking properties. Right now we achieved only standing and sitting. One of the options would be to write machine learning script that could learn how to operate six legs. Another thing would be to build a closed air system so we could be more independent from a compressor or to use minipumps to compress air.

Faculty: Angel Muñoz
Student: Andrzej Foltman, Filip Bielicki
Seminar: Hardware