
*project developed as part of MRAC Hardware I Seminar 2019/2020 // the project and all its associated files -> click to access gihub post
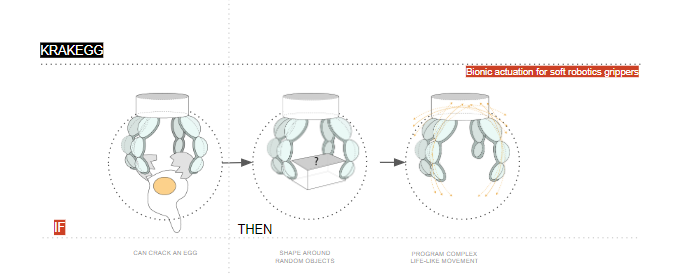
Krakegg is a soft robotics end effector exploring the potential implementation of bionic actuation for soft robotics grippers, through responding to the challenge of providing enough movement precision in order to mimick the movement of a hand cracking an egg.
The hypothesis behind the series of experimental prototypes is that if a complex life-like movement such that as cracking an egg with one hand can be replicated robotically, through pushing the controlability and predictability of pneumatic systems, then the system could potentially adapt towards replicating many other complex movements, therefore serving to a variety of tasks.
The research started with looking into existing pneumatics systems, fabrication processes, basic control parameters and simple electronic circuits.
_PROCESS:
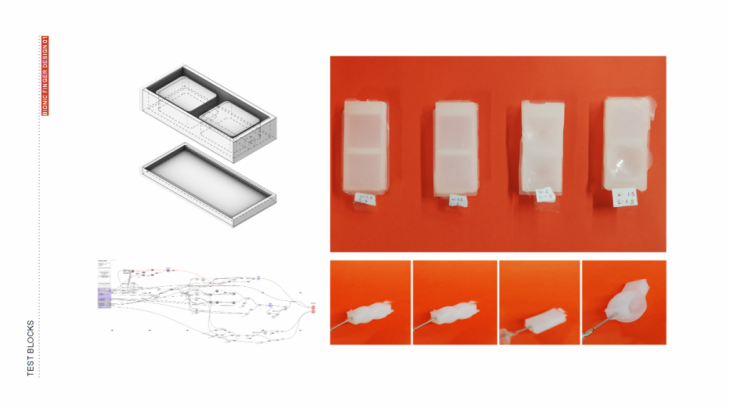
Prototype 01: testing open-source soft robotics moulds freely available online, in order to experiment with air pressure, material strength and actuation. 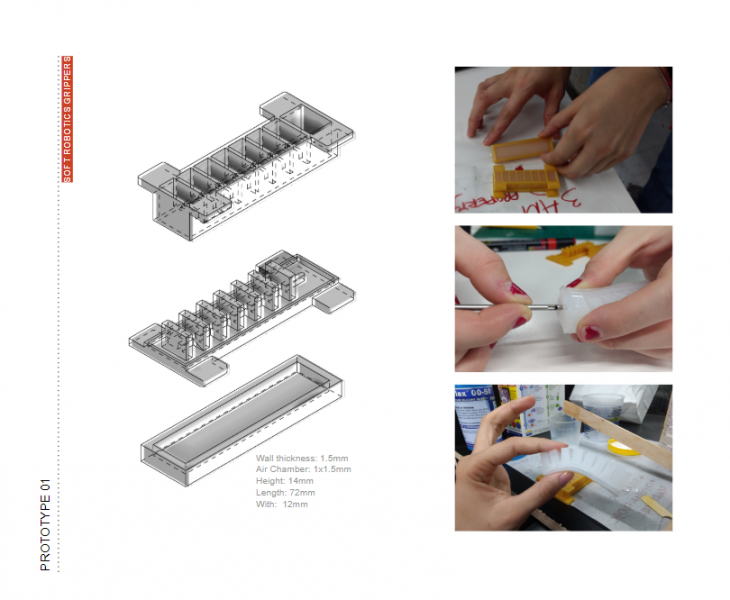
Prototype 02: the second prototype was informed by a general movement study of cracking an egg with one hand. The prototype is attempting to achieve the ability of grasping and releasing an egg, using four pneumatic fingers- the main group (three symmetrical fingers) and an opposable thumb.
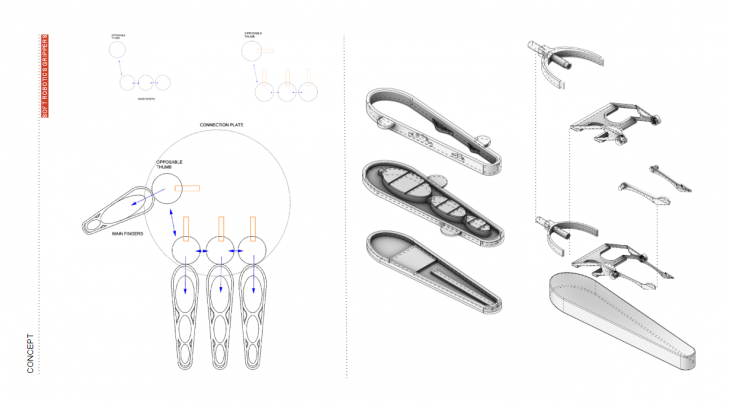
At this stage of development, the idea of adding an exo-skeleton emerged, in order to increase the precision of the XYZ movement and to provide a guide for the pneumatics behaviour.
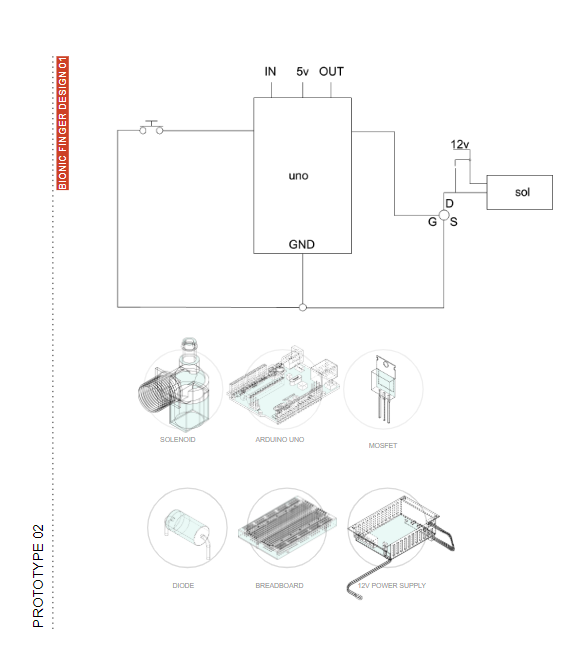
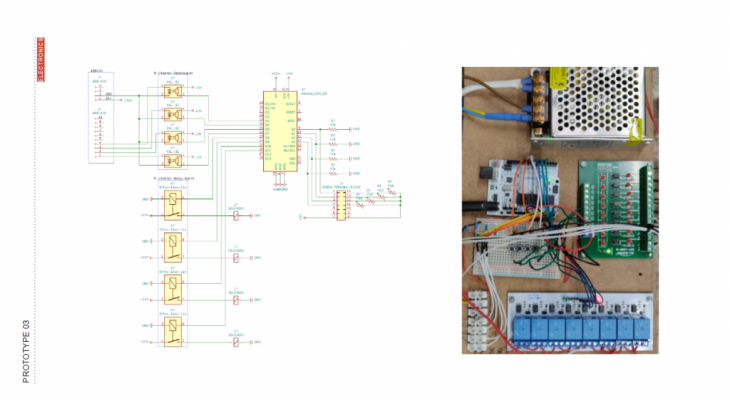
First electronics circuit to test the soft robotic actuation:
Mould experiments:
After the first stage of developing the overall prototype, its main functions and circuit elements, the relationship between the different parameters of mould making have been explored through empirically comparing mould samples in order to determine behavioural elements of the pneumatics systems in relationship to the material.
The process of producing moulds has been parametricised, in order to facilitate the production of 3D-printing ready moulds highlighting the relationships between different parameters.
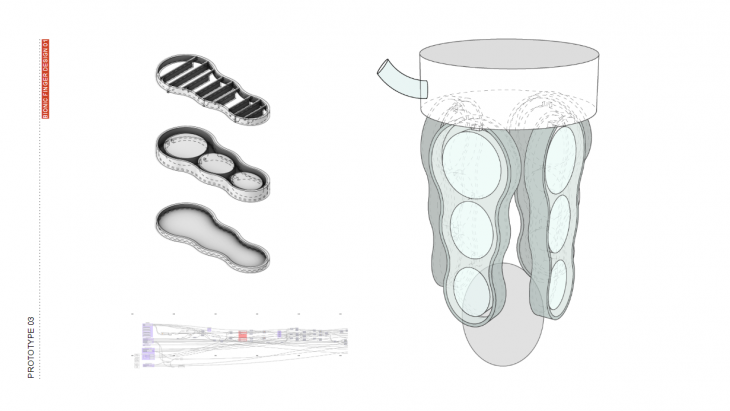
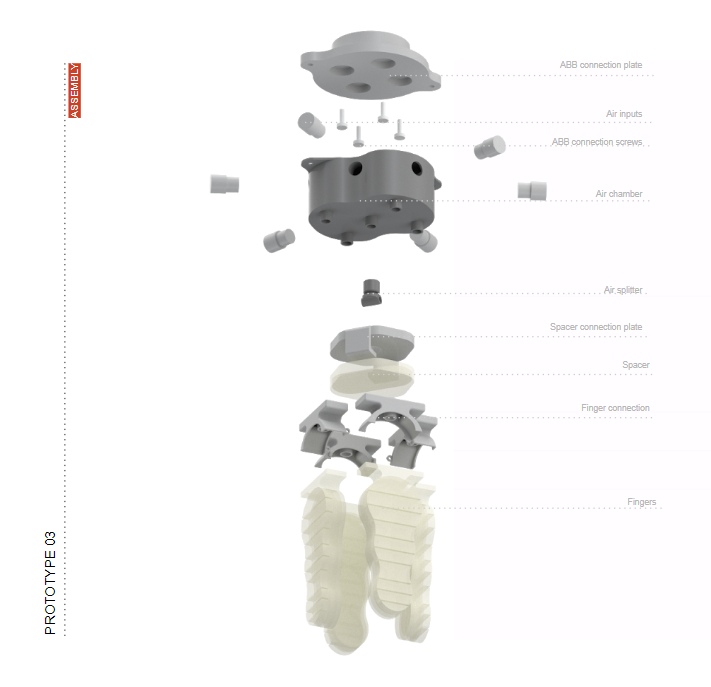
Prototype 03: the third prototype is informed by the previous tests, featuring a new design for the overall finger shape in order to better accommodate to the desired motion, inflating three different chambers resembling the biomimetic motion of a curling finger. The goal of picking and releasing an egg, as well as other variety of shapes is explored through maintaining four symmetrical fingers for this iteration.
The connection to the robot was 3D printed in parts and assembled on the ABB 140 robot arm.

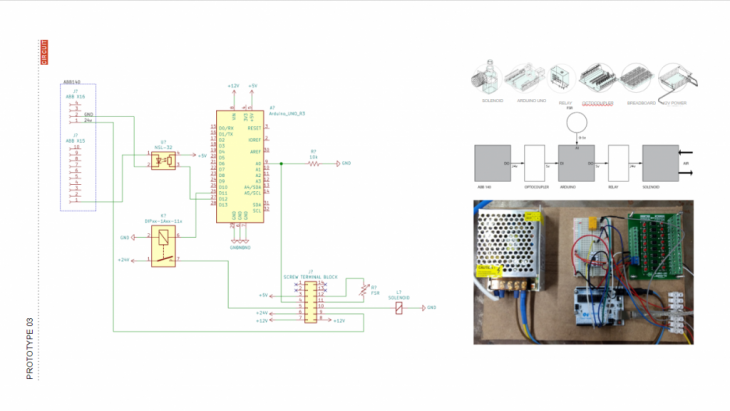
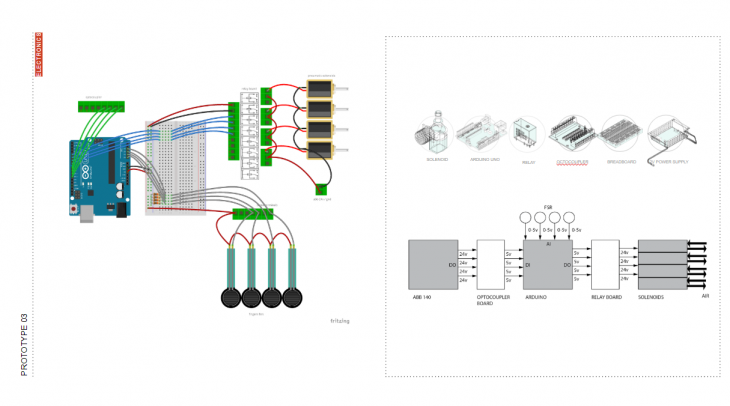
The electronics:
Video of the first prototype working:
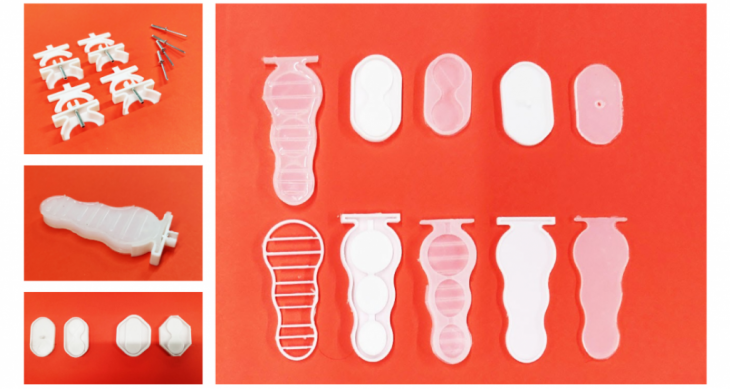
Finger designs tested:
 Final prototype:
Final prototype:
The final prototype for this stage of development proposes a series of improvements:
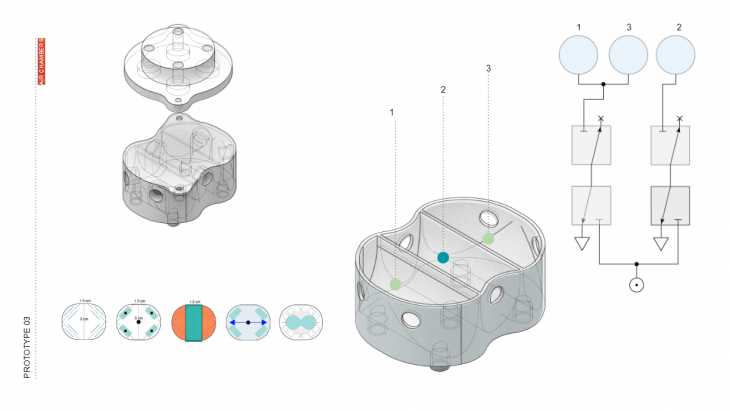
- the introduction of variable pneumatic inflation in each one of the fingers, through compartmentalising the air chamber
- using four different air solenoids in order to facilitate the differential air flow
- introducing a spacer (pneumatic pillow) in order to add horizontal movement to the prototype range of motion
- introducing force sensors in order to sense the grasp around picked objects
Final gripper design:
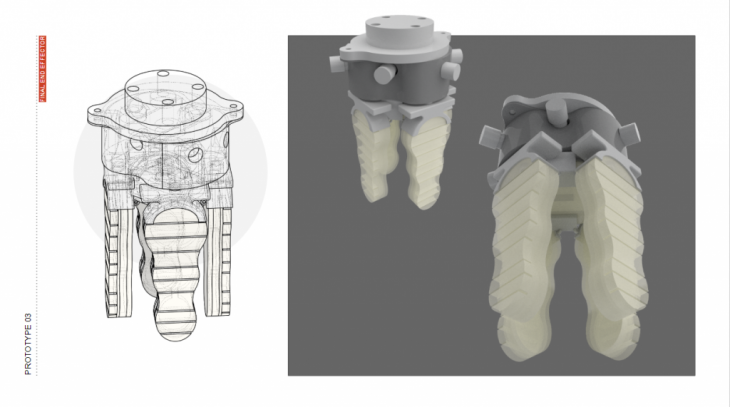
The gripper connects to the robot through a back plate attached to the sealed air chamber. The air chamber distributes air to the four symmetrical finger and the spacer cushion in the middle.

Finger & Spacer cushion production: 3D printed moulds, casting process, air connection tubes:
Dividing the air chamber into three different spaces- two of them supply each a pair of symmetrical fingers, whilst the middle one supplies air to the spacer. The two chambers supplying air to the fingers are controlled by two air solenoids, turning the signal on and off. The middle chamber is as well controlled by two solenoids.
Final circuit (step-by-step information on the hardware can be found in the GitHub post):
Final prototype video at this stage of development:
Krakegg is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Masters of Robotics and Advanced Construction in 2019-2020 by:
Students: Abdullah Sheikh, Andreea Bunica, Anna Battale, Matt Gordon
Faculty: Angel Munoz, Soroush Garivani