OBJECTIVE
The objective of the pick and place robotic seminar is to understand the capabilities of simple pick and place, learn about robotic manufacturing and designing, and to expand its possibilities.
The task for the pick and place is to create a catenary funicular geometry that can be consist of complex geometry and ease of assembly process; all while creating modules in a 2-dmentional plane.
DIGITAL EXPLORATION
Module Idea Constraints
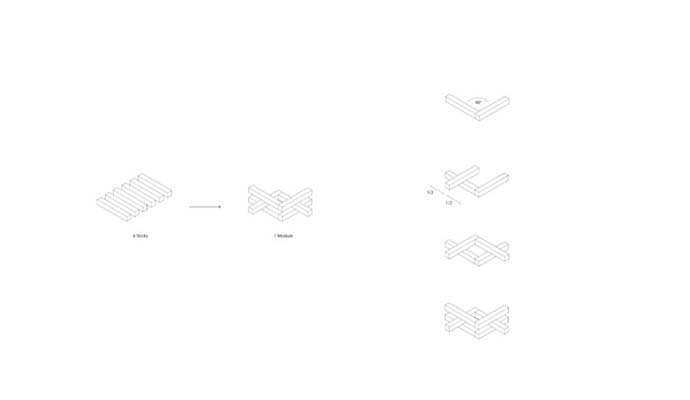
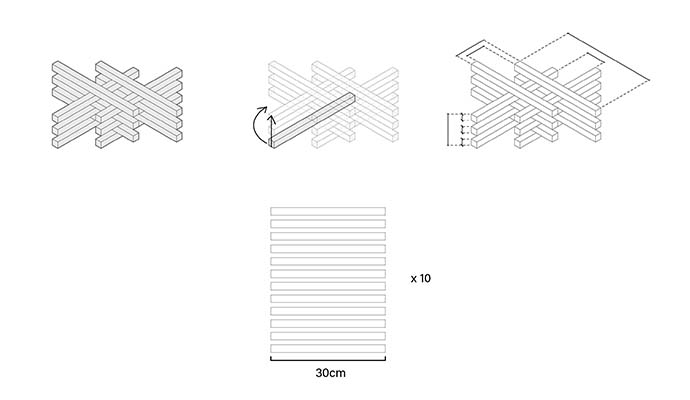
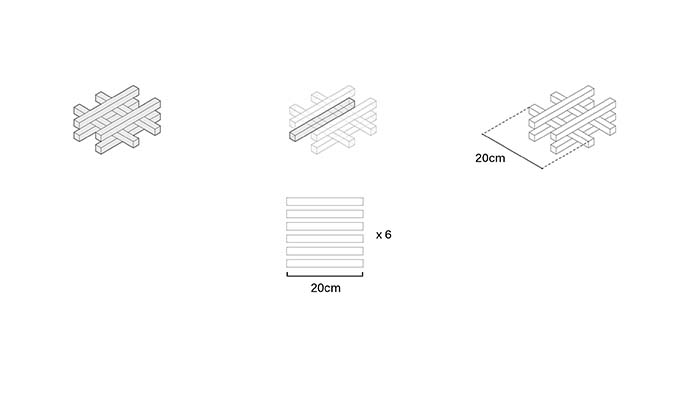
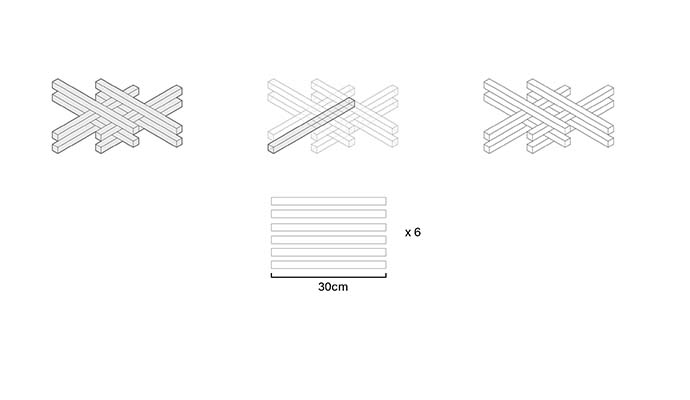
A single module composed with 6 wooden sticks was the driver for the arch. this module was the base of where to start producing and from there inform how the creation and connection of modules would work to create an arch.
Geometry Exploration
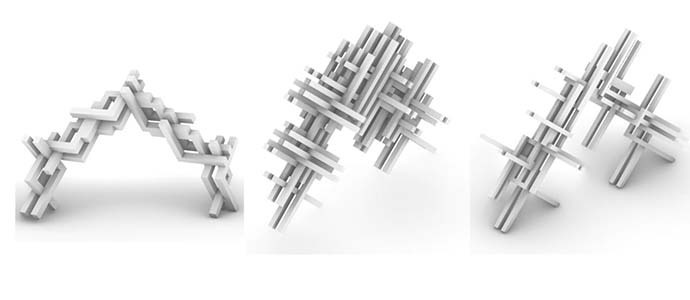
Geometry exploration was done in order to inform what kind of geometry would a single module would create.
EROORS & FINDINGS THROUGH PRODUCTION
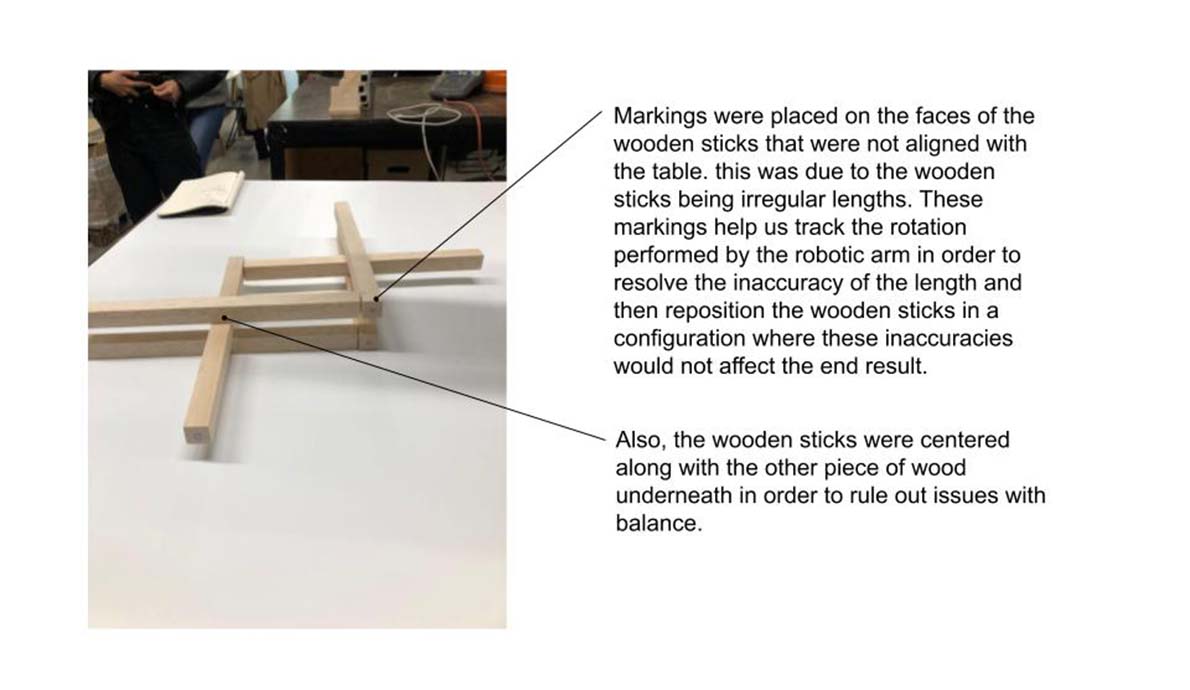
Within the robotic production, many things were learned to produce cleaner and more precise manufacturing. One important thing that was learned was to have all the pieces in a homogeneous length to avoid clashes when the geometry is stacked next to one another. If possible even have the piece rotated to have the true distance from the center point as the edge that would touch another piece to avoid collisions and the movement of the final geometries.
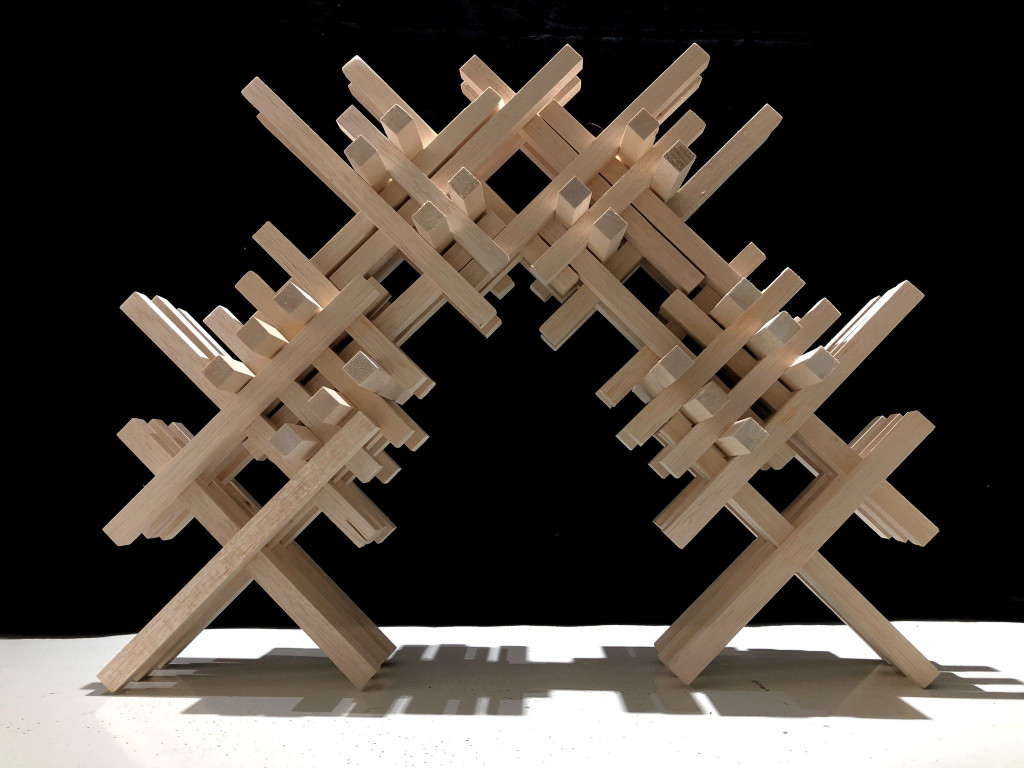
GEOMETRY
The over all arch is composed of 4 different modules to create one span of the arch. Thus to complete the the full arch a total of 8 total modules are used. Then the two arches are connected by the top piece. In turn, totaling to 5 different modules to create the complete arch.
Module 1
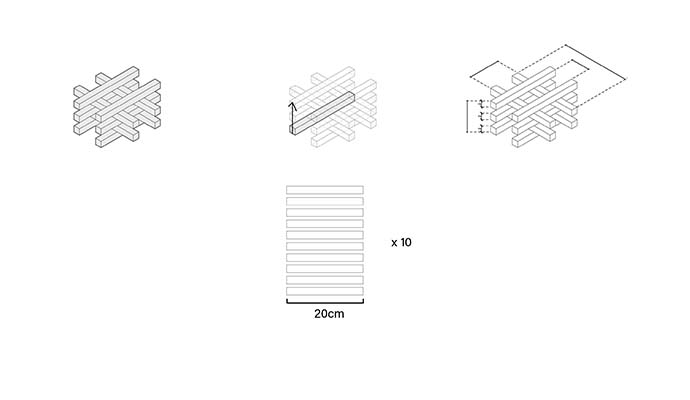
Module 2
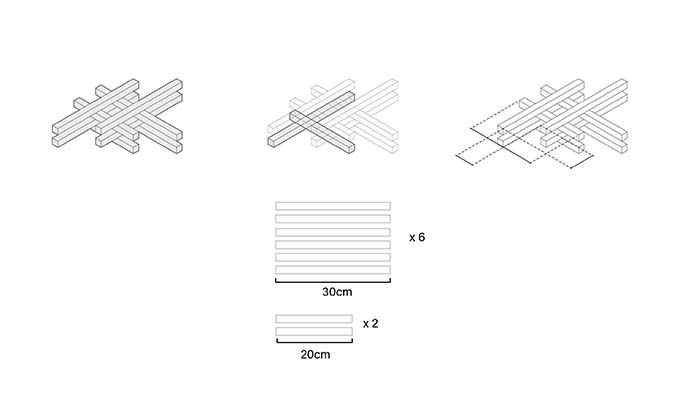
Module 3
Module 4
Module 5
MODULE CONECTION
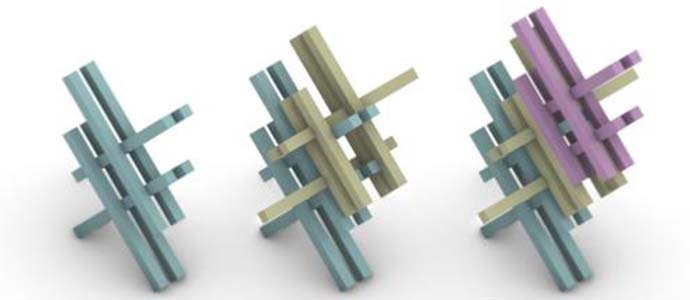
The modules are connected by interlocking them with each other. this provides stability and rigidity when the arch start to overhang to create the curvature. The top piece slides-in to connect the two arches acting as the key stone of the arch.
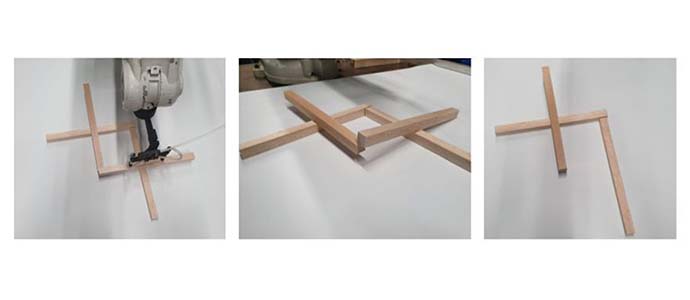
SIMULATION, & PRODUCTION
FINAL PRODUCTION
CREDITS
INTERLOCKING WOOD PICK & PLACE is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Advanced Architecture 2020/21 by Students: Diego Vazquez De Santos, Mara Müller-de Ahna, Victor Engelhard Suarez, Charicleia Iordanou; Faculty: Ricardo Mayor, Lana Awad, and Student Assistants: Liang Mayuqi.