> THE CONCEPT
The project explores the idea of privacy, allowing the user to interact with the prototype through proximity sensors.
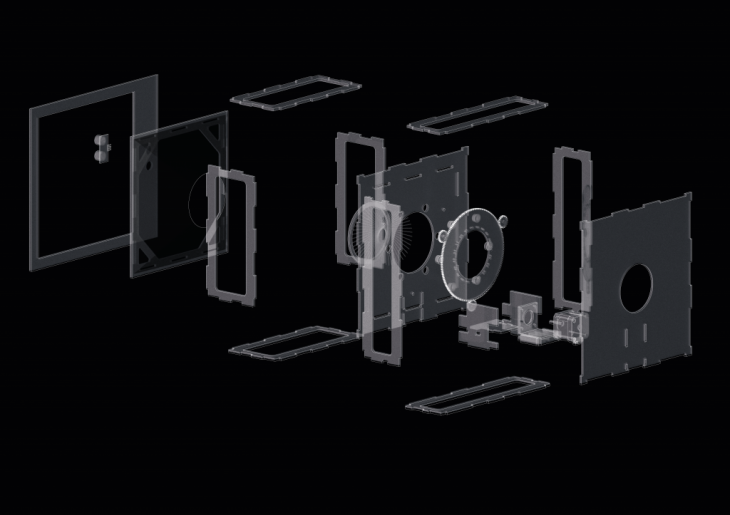
Thanks to the hyperboloid shape, whenever an object (or person) gets closer, the motor will engage the gears and rotate the back ring, creating a mechanism that pulls the front ring and stretches the fabric attached to it towards the back.
> THE TECHNIQUE
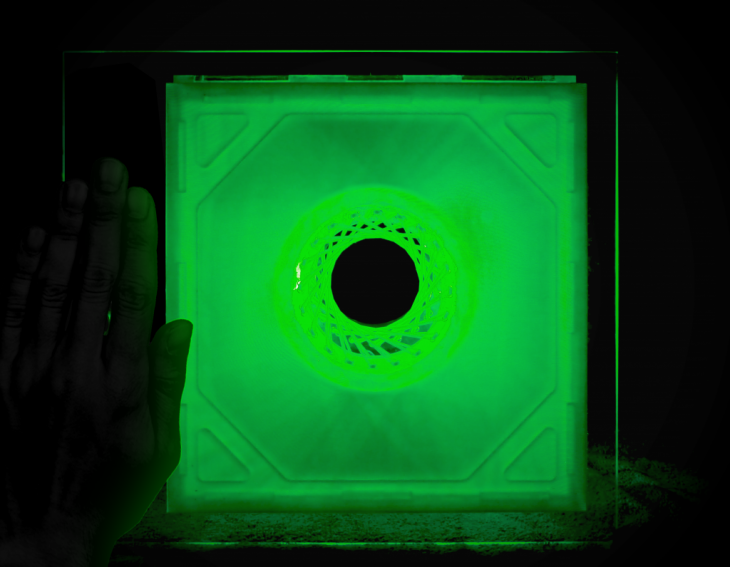
Throughout this process, the strings connecting the two rings will also rotate, narrowing/widening the aperture accordingly, thus affecting the visibility towards the other side of the kinetic facade.
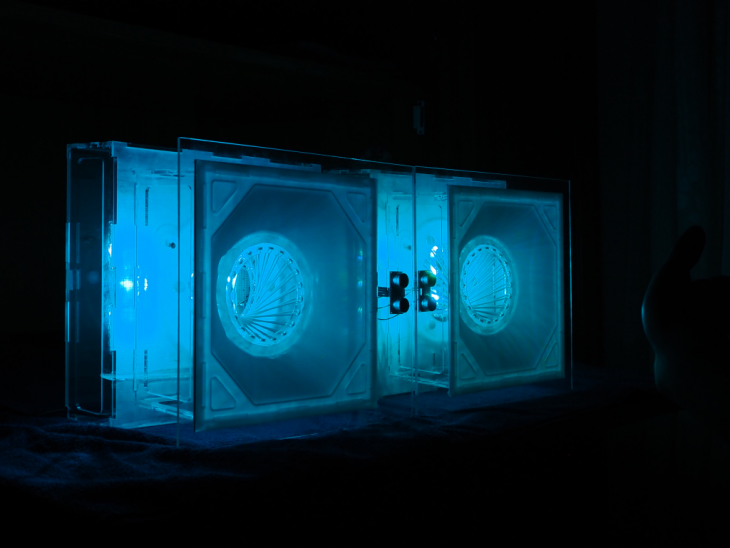
The incorporated RGB LED lights system is responsive to the distance values the sensor reads as well, creating a gradient from blue (when it doesn’t detect anything) to green (when detecting objects in close proximity).
> THE PROTOTYPE
The modules are programmed independently, each reacting to its own sensor values, allowing the users to control a range of apertures and light gradients across the facade.
The final prototype aims to record movements data and consequently to translate it into dynamic and kinetic interaction .
O-HB600 is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Advanced Architecture, in 2019/2020 by:
Students: Andrea De Stasio, Dusan Savicevic, Francesco Polvi, Harsh Vora, Stefana Zapuc
Faculty: Angel Muñoz, Cristian Rizzuti
