Soft robotics form an exciting area of research: their organic, malleable forms hold promise of new ranges of movement and manipulation for the world of robotics, which has hitherto been characterised by rigid casing and materials. But, most excitingly, soft robotics offer us a chance to completely reframe how we think about computing. Some soft robotic systems, such as those currently under investigation at NASA, have adaptive end effectors – typically made of inflatable silicon sacs – paired with more typical hardware like microchips and actuators that control the flow of air for inflation. Yet others, such as the 2014 Octobot, locomote due to liquid chemical reactions within a silicon body, and so have no rigid components whatsoever.
Hardware doesn’t have to be hard.
As with all good design, we knew that if we wanted to make a soft robotic the application would need to take advantage of the characteristics of the system. Wearables are common deployments for soft robotic projects, as the variability of the air pressure within a silicon sac can be interpreted by the pressure sensors of the body, permitting a range of messaging beyond the binary. Yet, alongside our interest in this form of robotics challenging the status quo, we also found ourselves looking outside the western hegemonies of common architectural features. It occurred to us that “doors”
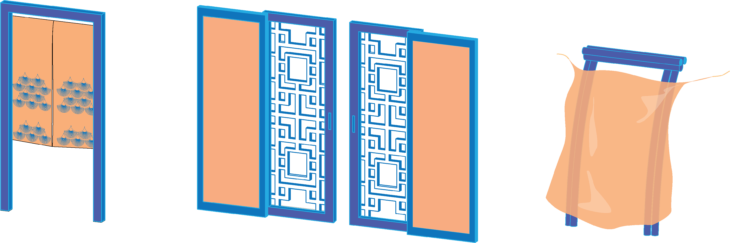
Material of doors in the other, more traditional, culture reveal a more variety of material. We revisit the notion of door as barrier/gate, and how it is executed.
An interactive soft doorway that senses human behaviour and responds to permit or deny passage
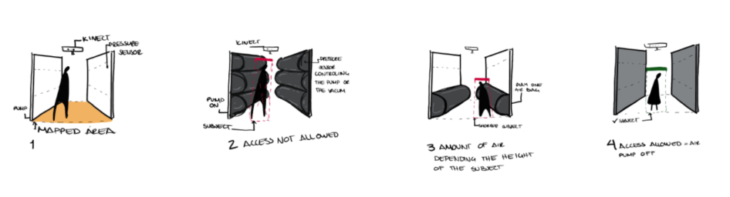
Pseudocode:
-Detect human face
-Inflate
-Stop
– Analyse facial expression
-If smile detected, deflate
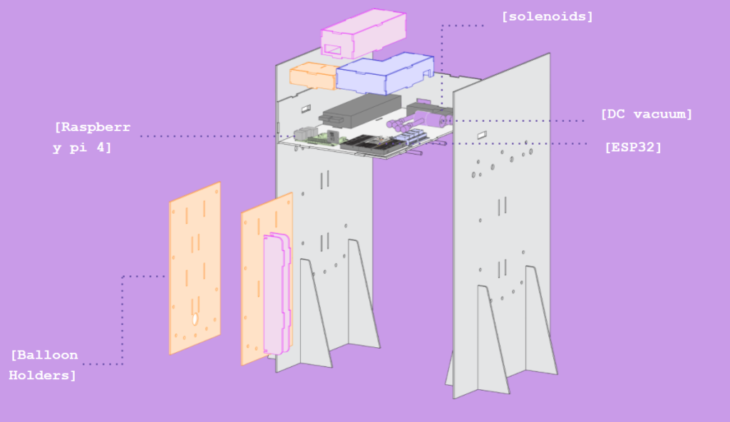
Functional Diagram
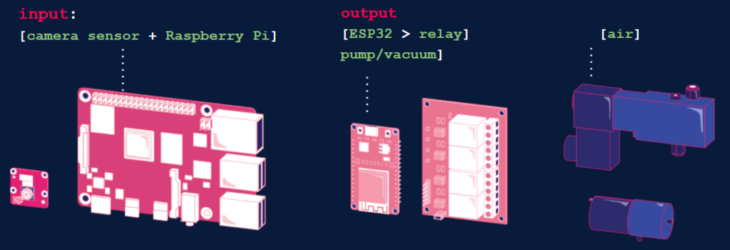
Input
The data analysis will happen on the Raspberry Pi, which will need its own operating system.
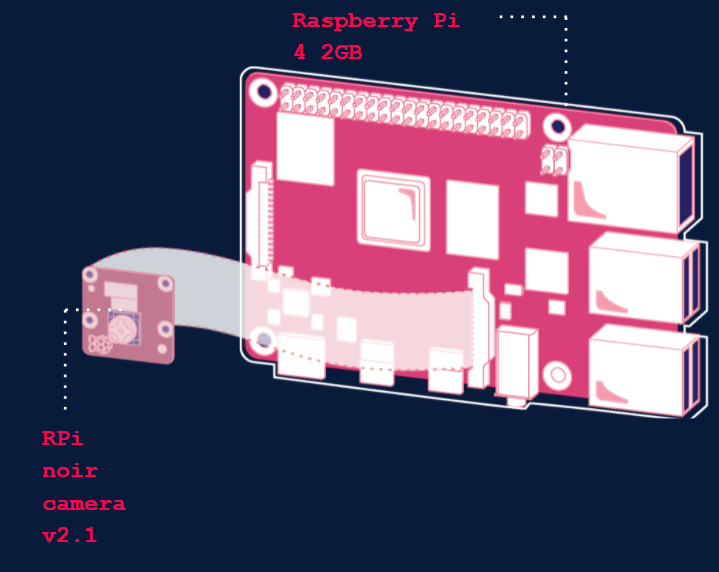
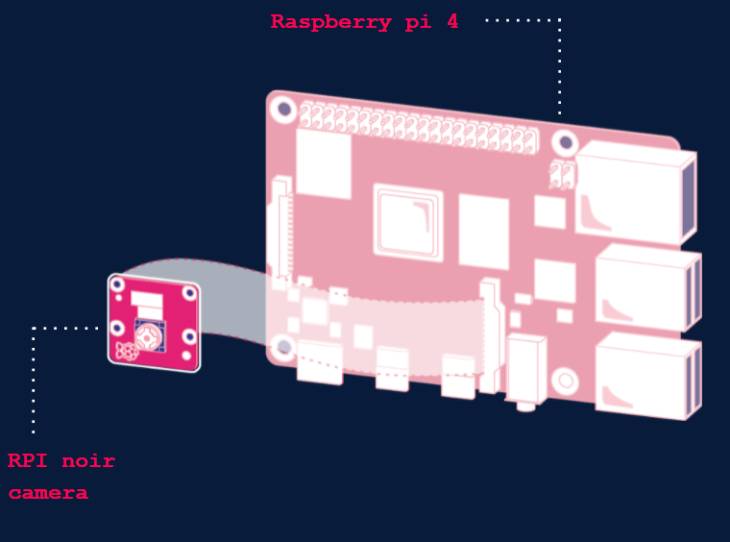
The data analysis begins with detecting a human figure. Then the trigger is defined by the expression of the individual.
Output
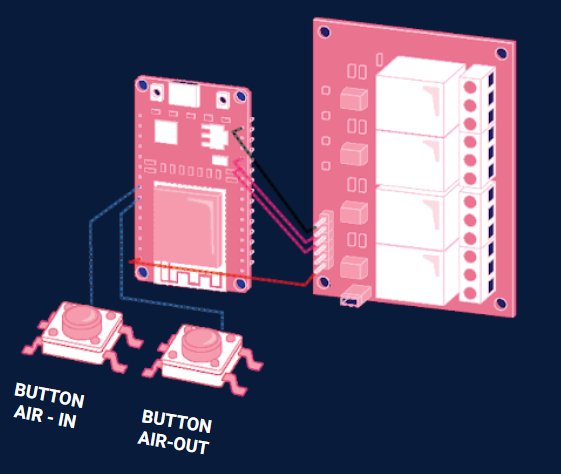
The output side began with one button imitating the “air_in” signal, another button imitating “air_out”.
Hardware Schematics
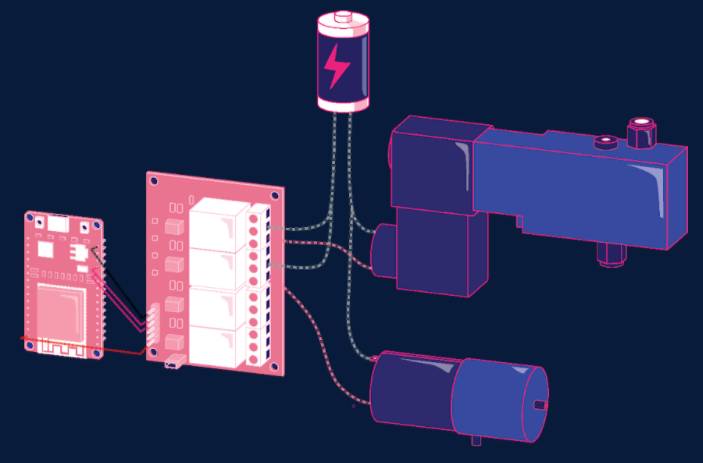
We chose a 12V DC air pump as vacuum, going with a 12V solenoid to blow air in. Due to pressure inequality on both ends, we had to set time limit for air flowing in.
Prototype
Materials we tested were latex, rubber balloons, and vinyl camel bag. The choice of inflatable was influenced by the inflation behaviour, pneumatic performance. Each type of inflatable has different implications of the frame design.
</p>
</p>
Inflatable Soft Robotics is a project of IAAC, Institute for Advanced Architecture of Cataloina developed at Master in Robotics and Advanced Construction in 2021 – 2022 by:
Students: Andrea Nájera, Grace Boyle, Jordi Vilanova, Amy kim
Facultys: Oscar Gonzalez
Assistant: D. Koshelyuk