Workshop 3B | MRAC 2018-2019
Faculty: Johannes Braumann
Faculty assistants: Kunaljit Chadha | Amir Bastan
Project by: Omar Geneidy | Sujay Kumarji
Human – Robot Collaboration In Wood Joinery
Workshop Overview
In the context of digital design and digital fabrication, machines and robots are always programmed with no tolerance. While, in the physical world, that is not the case as there are always these inaccuracies that are hard to predict. That’s why, in an attempt to address such limitation this workshop focused on:
- Splitting a large, complex task into a series of small, easily programmed tasks that rely on sensor feedback to inform their parameters.
- Optimizing the robot’s capabilities, utilizing its strength and accuracy, while relying on manual assistance for steps that the robot cannot perform.
Vision
For our group project, the goal was that given a certain task (wood joinery taken as an example). A human collaborator with the robot could have a stack of material that can vary in shape and size.
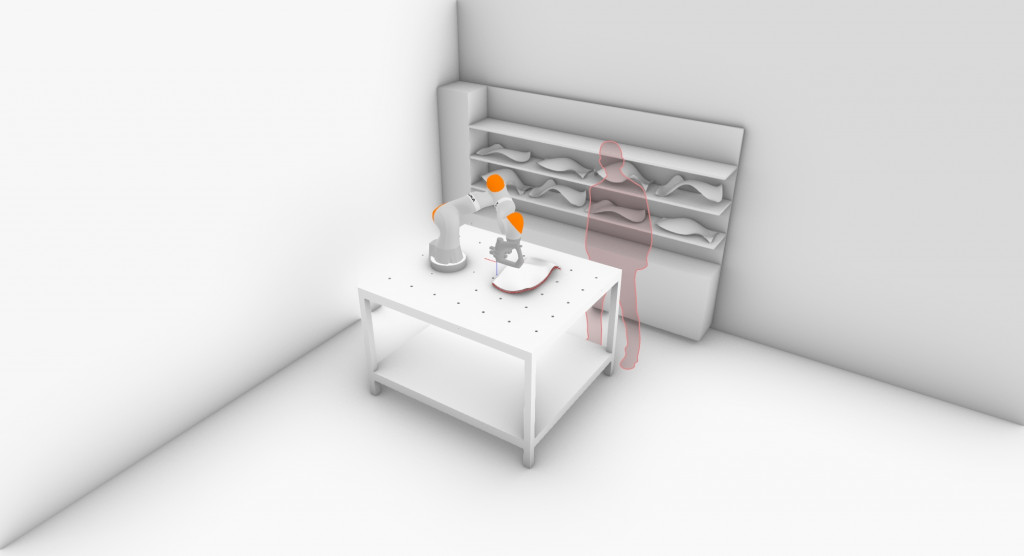
The process would start by guiding the robot manually guiding the robot to the key points of the task to be performed for the piece in hand.
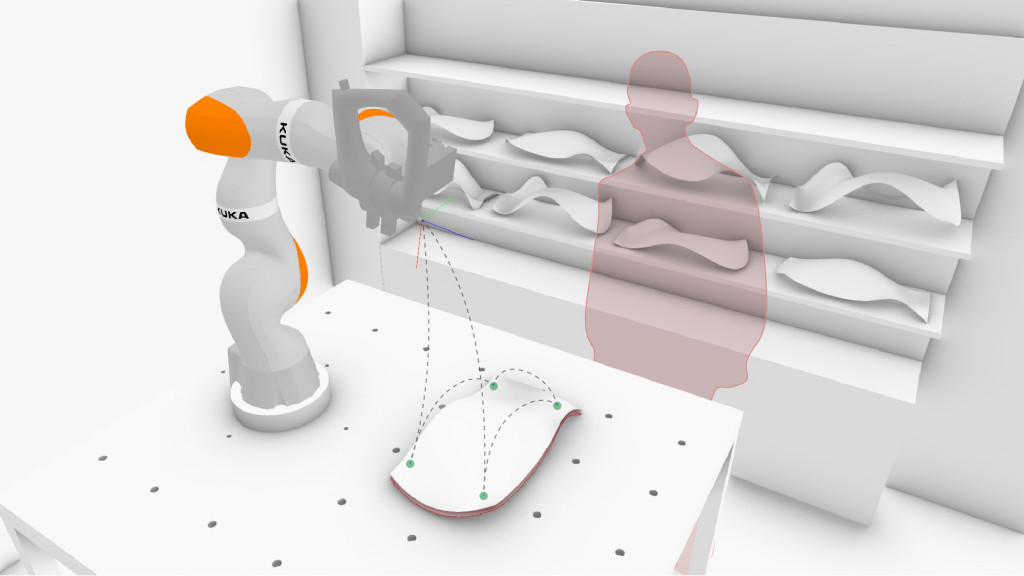
This would be followed by a real-time path generation, and geometry adaption using force feedback sensors from the robot.
Then repeating the process again for each piece.
By doing so, we can utilize the human intelligence with the robot accuracy, strength and sensors. in having a seamless workflow for performing a required task without going back and force in writing offline codes, calibrating, scanning, …
Proof of concept
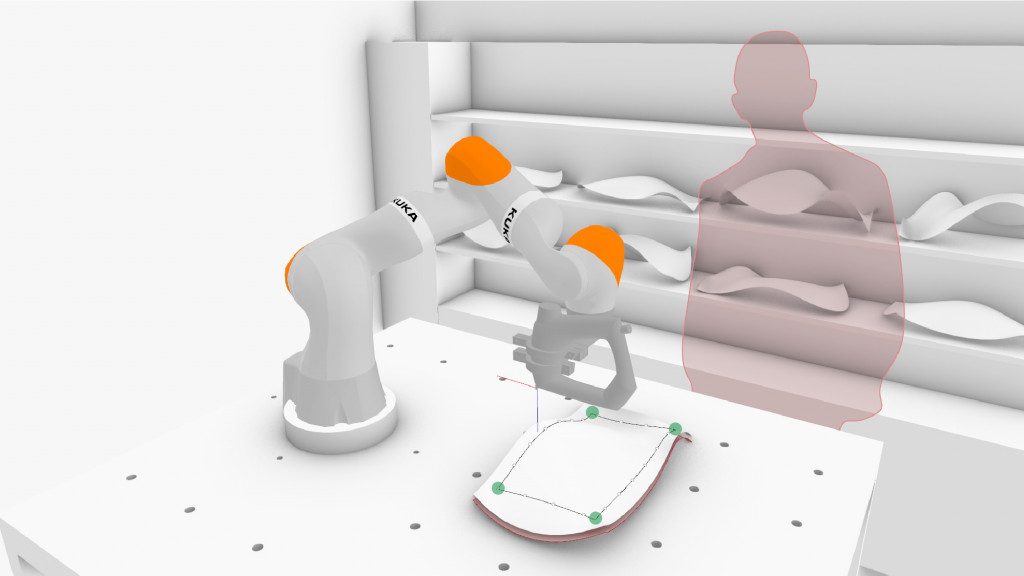
As a prototype for the proposed method, we placed two pieces of wood to be joined in a random place in the world coordinates. Guided the robot for the corner points. And then letting the robot staple them using an industrial staple gun.

Future steps
The next step would be using a piece of wood with curvature and testing it using the same code and concept. That could be followed by a new layer of addition to the code so that the approach of the robot to the working piece is always done along the normals.