Hi Friend // WorkShop III.2
‘ Hi Friend’ is a project by MRAC 01 student Tomas Quijano ,Christopher Booth , Abanoub Nagy and
Alberto Martínez during the WorkShop III.2 of the third term. WorkShop III.2 was taught by Madeline Gannon ,Daniil Koshelyuk and
During the WorkShop III.2, students had to explore ::
Ways of human robot interactions
ABSTRACT
In this project we explored how to interact with the robot with manipulating two points. The TCP point and a target point. The robot used is is a UR (Universal Robot). The hardware used are an Astra camera and leap motion camera . Unity was the Hub that receiving point from TouchDesginer and to visualize the move from unity was sending points to Grasshopper and in order to visualize them on Rhino window.
Introduction
So in this workshop we contino

Concept idea
</p>
Our Set Up
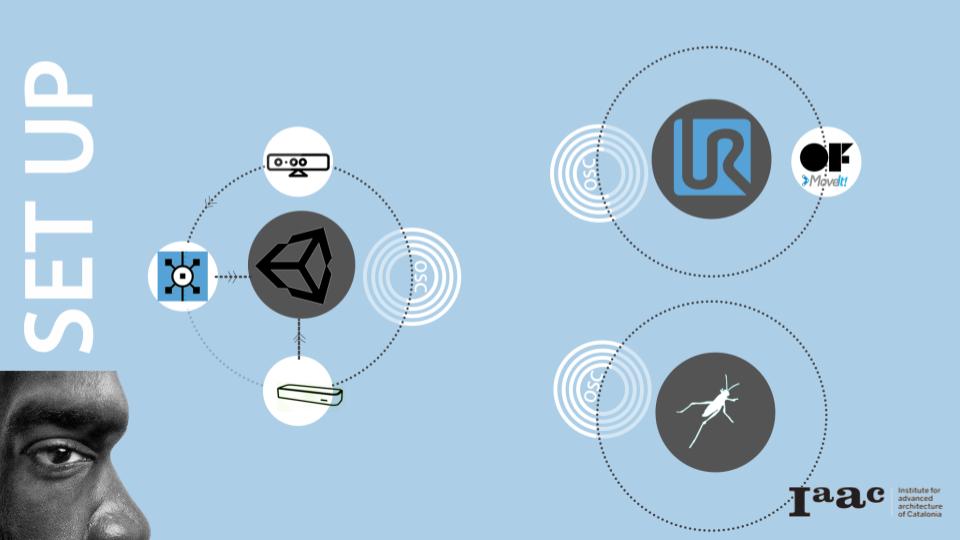
B) TouchDesginer
We used here TouchDesigner to get the second point. The Astra camera already have built-in pacake in the TouchDesigner sofrom very simple script was built in the TouchDesigner. The Target point ,which in this case a human. The point was capture using an Astra camera.We captured the of human joint points .Filtering those point into only for neck. The neck movement and the this point was sent to unity .The Unity was acting as a hub or station to process all the points.