Hardware and Pseudocode on Bending Robot
This is the main set of the project, where the main hardware elements can be defined.
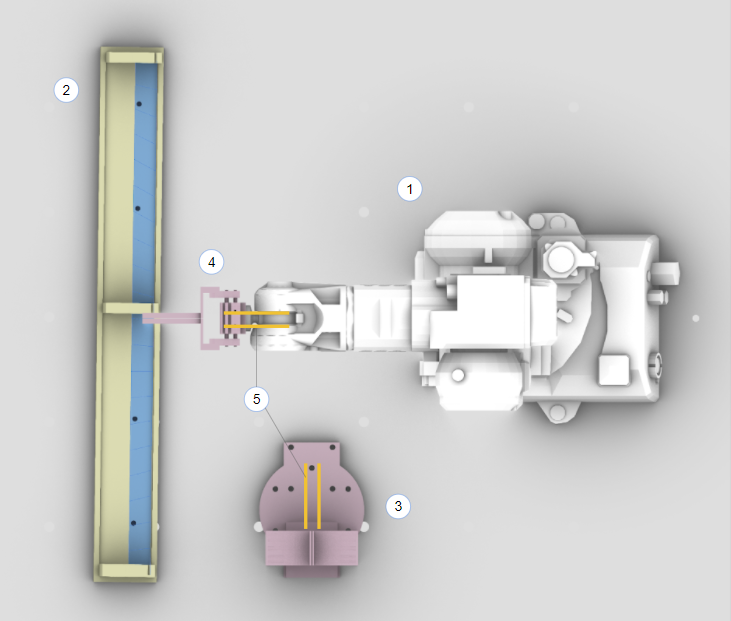
1. ABB robot IRB 140
2. Picking station
3. Table gripper
4. Robot gripper
5. Pneumatic circuit connectors
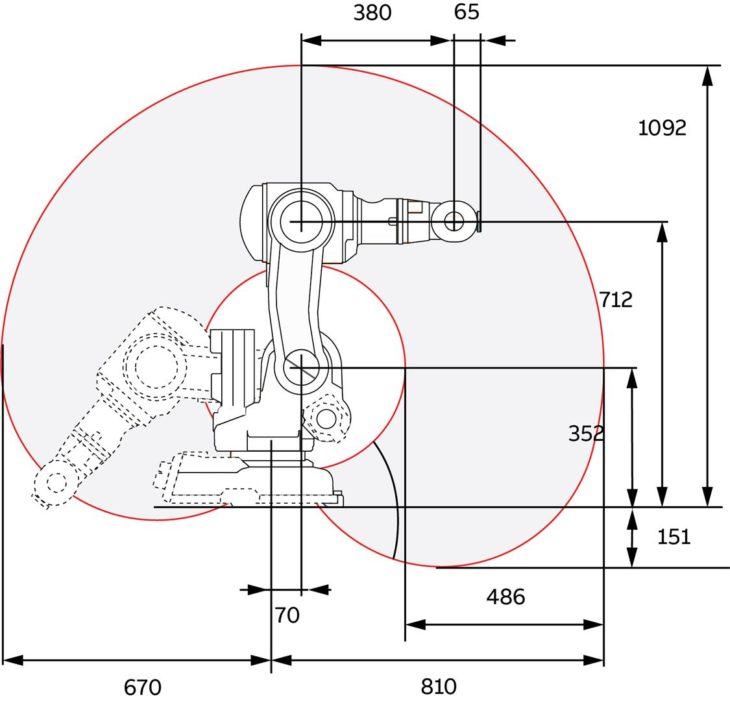
ABB Robot IRB 140
These are the main characteristics of the robot used on the project:
Motion: 6-axis
Max. load 6 kg
Max. reach (5th axis) 810 mm
Mounting: Floor, inverted or wall mounted at any angle
Applications: Arc welding, assembly, cleaning, spraying, machine tending, material handling, packing or deburring.

Hardware Picking station
The sheets set to be bend are placed on this picking station.
Dimensions: 105 x 10.5 x 9 cm
Inclination: 55 º
Position: Parallel to bending position
Z distance from Home: 75 cm

Table gripper
Materials: aluminum, wood, steel RPW-625M -1 gripper
Position: perpendicular to table edge to bend outside
Gripping area: 6.5 x 6.5 cm
Opening distance: 2.8 cm
Extra gap sideways: 10 mm
Open / close (I/O): solenoids
I/O Pin: DO10_11, DO10_12
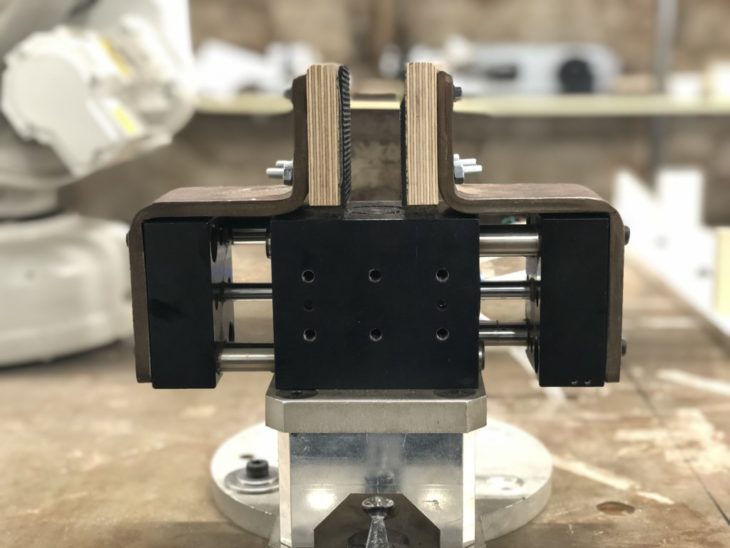
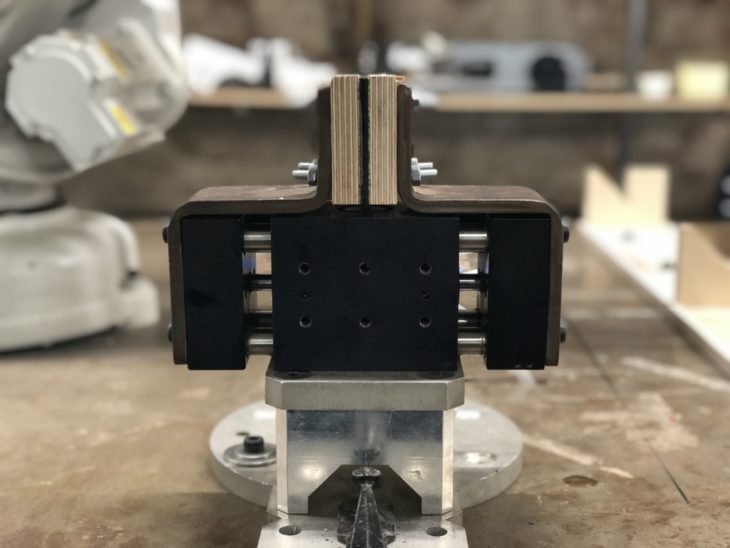
Robot gripper
Materials: aluminum, wood
Gripping area: 13.5 x 3 cm
Gripping depth: 11.1 cm
Opening distance: 2 cm
Extra gap sideways: 10 mm
Open / close (I/O): solenoids
I/O Pin: DO10_09, DO10_10

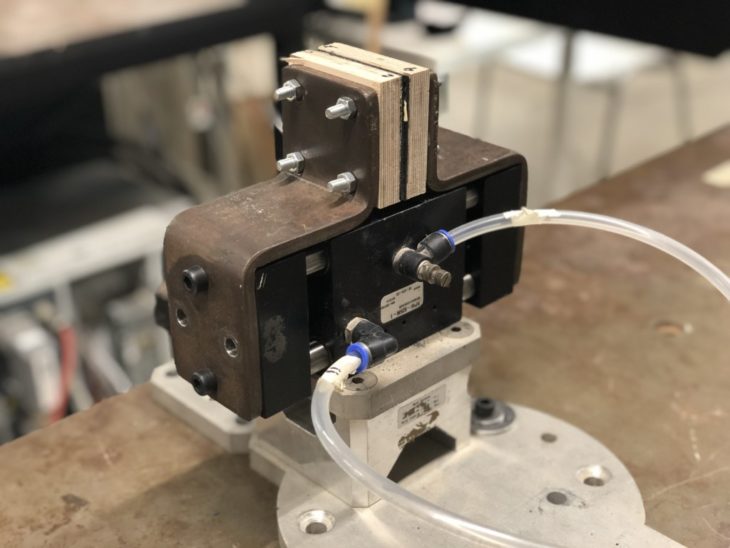
Solenoid Pneumatic system
The robot and table grippers were connected in a pneumatic circuit that enabled or disabled them according to the robot’s order on the program. This signal would activate or deactivate the solenoid opening the gate of the circuit and the presurized air would open and close the clamps.
Communication: air circuit – solenoids (signal)
Pressure: 6 bars
Open/Close: constant pressure
Start: all I/Os at 0
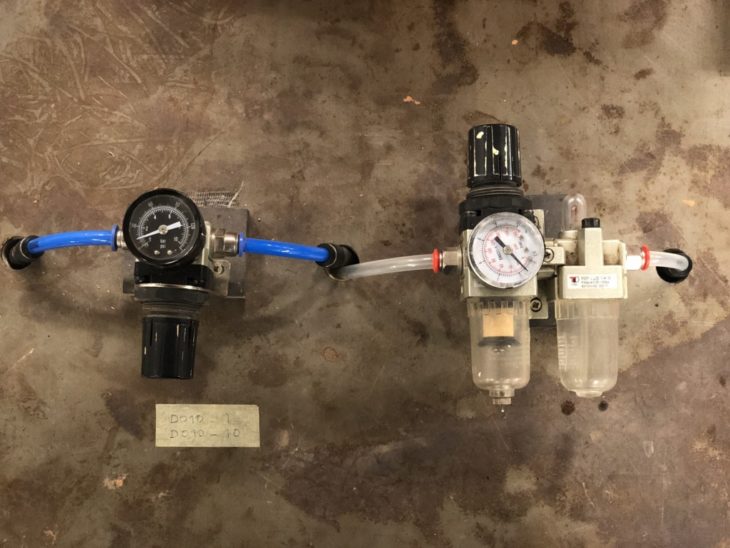

Pneumatic gauges at 6 bars Source: Heschen
Pseudocode
On the sequence of operations made by the robot on the program, the robot will first, pick the sheet from the station and bring it to the table jaw as shown:
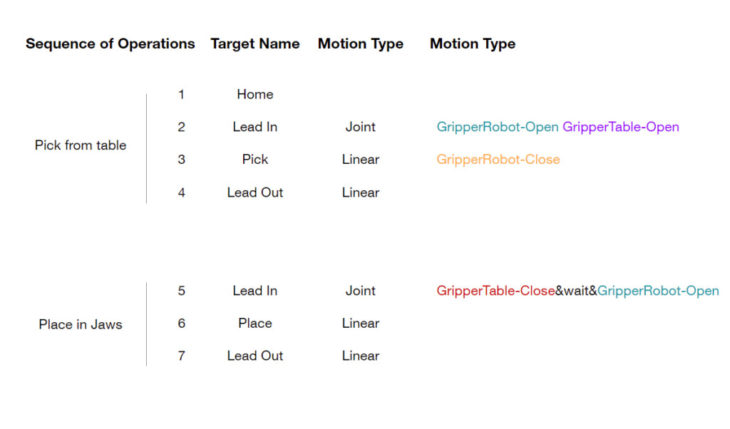
</p>
Then, the robot gripper will move behind the first bending line, close the jaw and turn to certain angles, pull to the following bending line and repeat the action until the last bend. Then open both grippers and move the robot gripper Home.
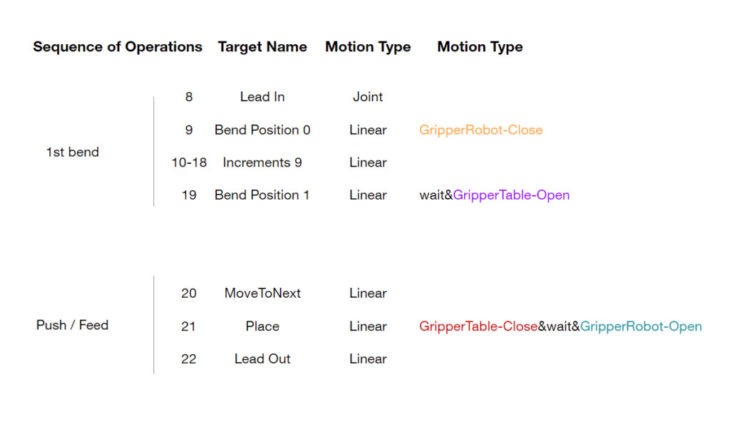
</p>