FIBULA ROBOTICA / ROBOTIC CLIPPERS // R.1 STUDIO I
This page is still work-in-progress:
The project FIBULA ROBOTICA was developed during the R.1 Studio I of the MRAC 2020/21 program. The seminars approach was to start with manual explorations of reused off-the-shelf parts developing into the deformation and combination of those into a larger aggregation within an architectural context.
![]()
Overview
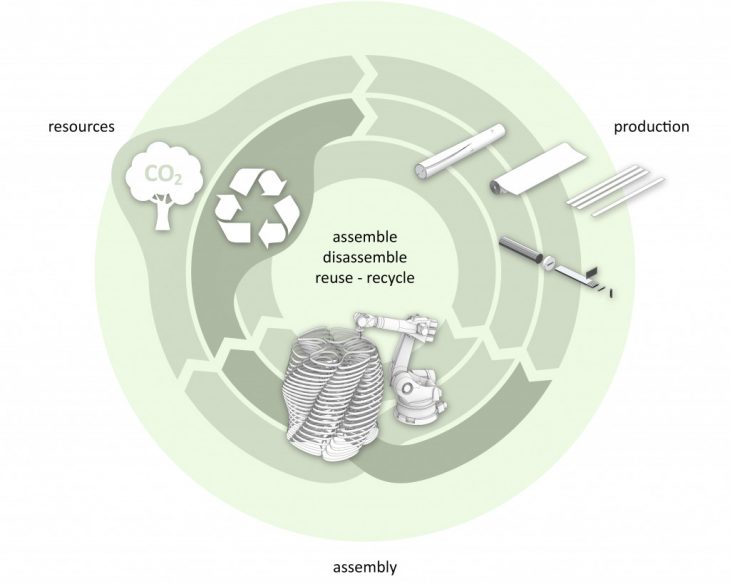
FIBULA ROBOTICA explores the combination of robotic fabrication and the idea of a bottom-up-approach in architecture by combining small parts into a larger aggregation. The aim is the design of a versatile assembly system which can be assumed to be assembled either fully automated or within the concept of robotically aided assembly.

Manual Explorations
The team started exploring the idea of assembly of smaller parts into a larger system with the aggregation of the usual clothespin.

Evolution of the Clipper
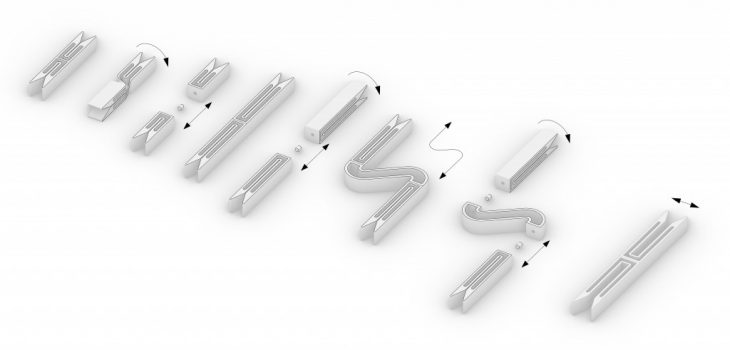
The essential properties of the clothespin were explored and transformed into various forms of clips.
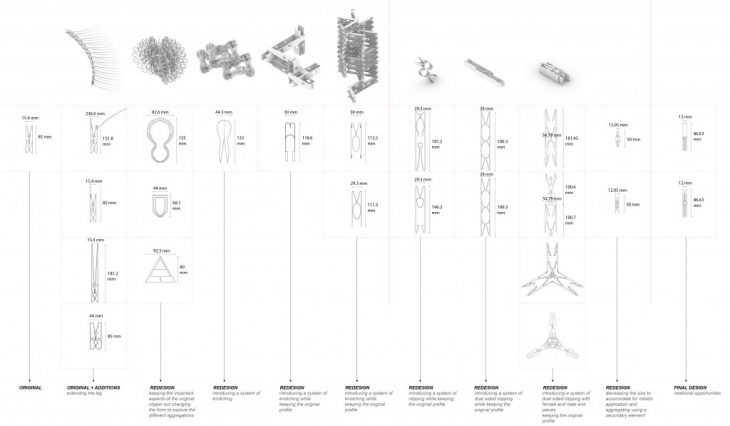

Materialization
The essential properties of the clothespin were explored and transformed into various forms of clips.
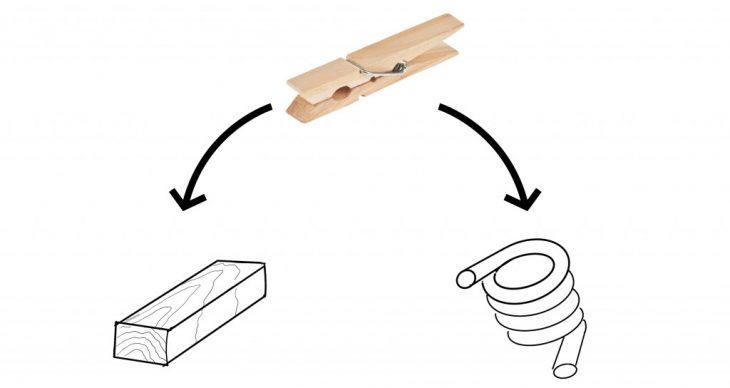
The materials of the clothespin- took apart and reassembled in their most simplistic state – ecological sourced wood and metal in form of recycled aluminum.

The use of wood as veneer or engineered bendable plywood is the most efficient way to use wood.
Form Finding
Clipper prototype to accommodate for incorporating veneer into the system:
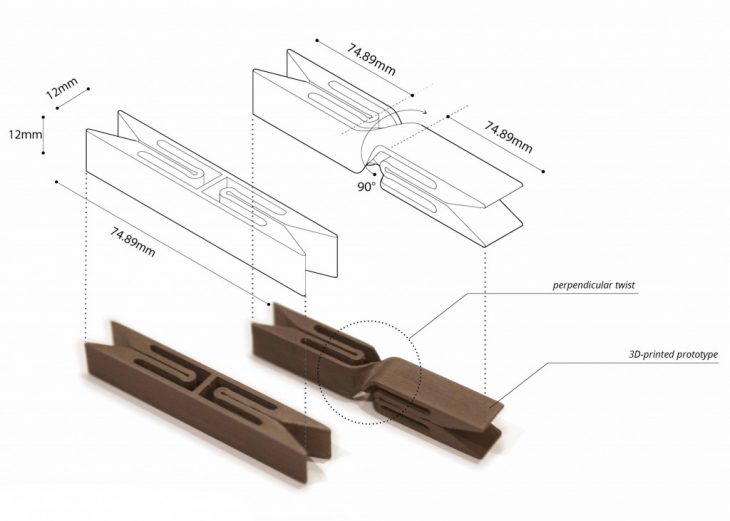
Proposed to produce the clipper from recycled aluminum as extrusion cuts to have the system very low in cost and highly scalable.
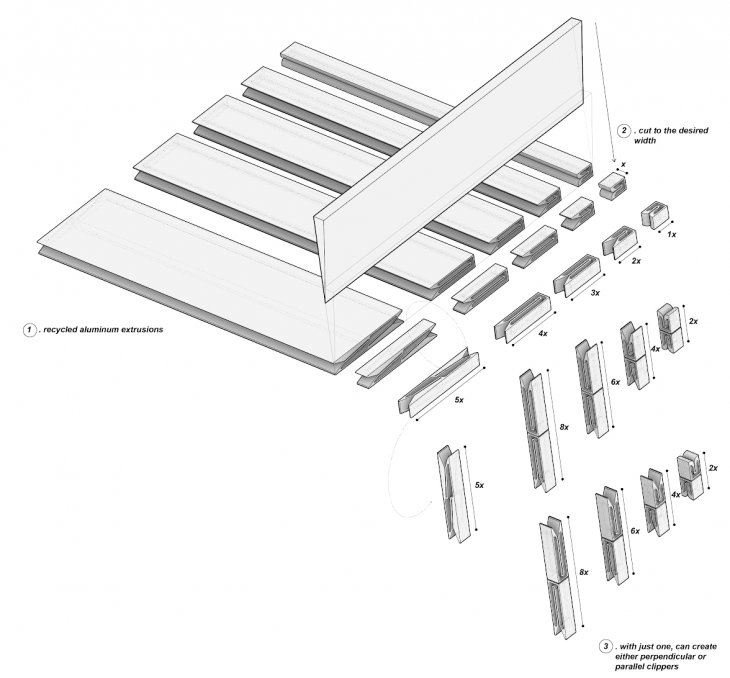
The clipper can be seen as highly parametric in the bounds of being cut from a single extrusion. Multiple deformations of the clippers are possible to allow for different rotations, inclinations and sizes and heights of different materials.
System of Aggregation
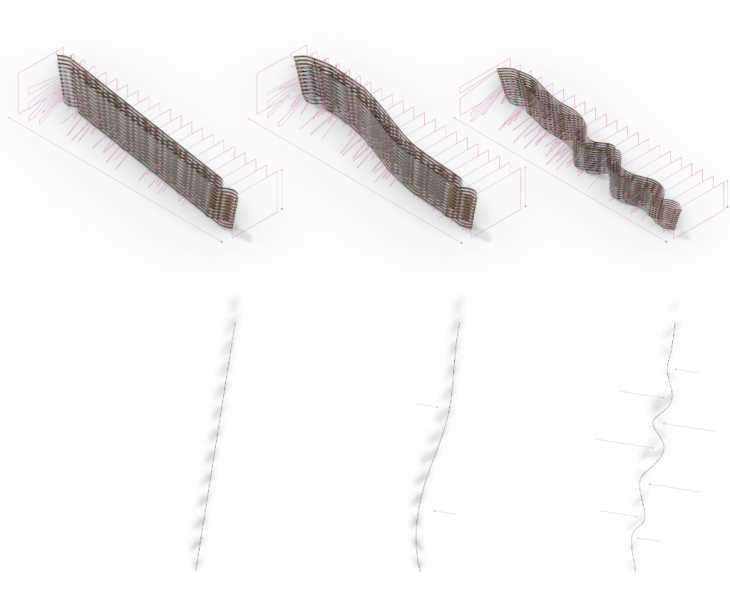
To strengthen the stacking of layers the method of placing layers perpendicular rather than tangential.
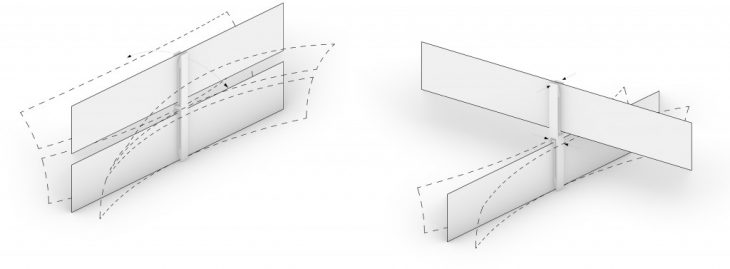
By applying this scheme onto a base curve the geometry starts to strengthen itself when rising in height. This perpendicular system can be applied onto all kind of geometries and can be scaled into all directions.
Robotic Craft
Mentioned earlier, the robotic explorations were split into two schemes: fully automated assembly first and a human-machine-collaborative approach afterwards.

First starting in small scale with the ABB IR-140 robot to explore the fully automated task of placing veneer and clips.
Custom-made end-effector to pick and place the veneer, slide along the veneer and place the clips. The design of a suitable tool is essential for the success of the robotical assembly.
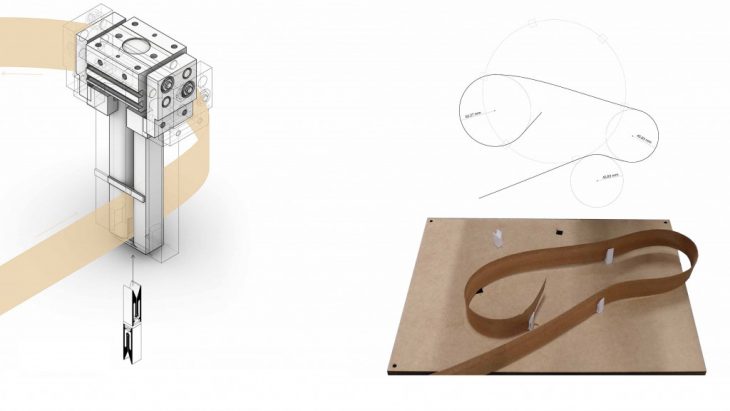
Above the first type of end-effector and an image of a basic tool pathing to measure the bending of the veneer.
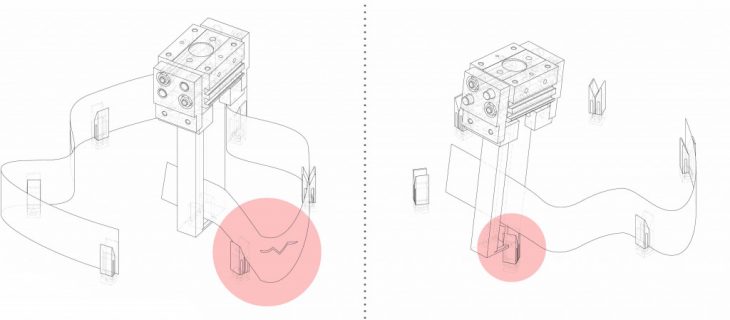
During the trials with the veneer in the small scale we encountered several material behaviors we wanted to eliminate by switching to more durable material and into a more architectural scale.
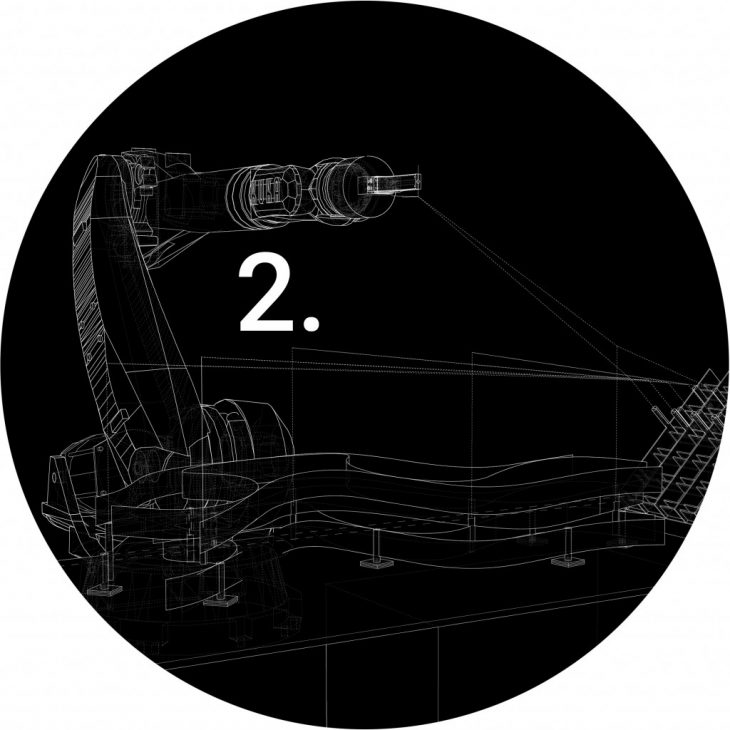
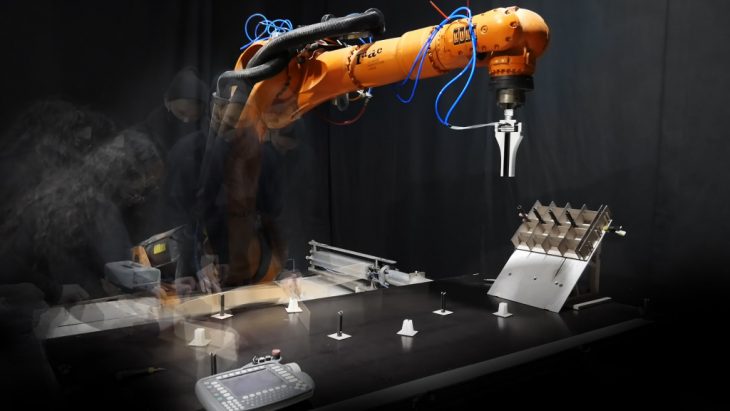
Later the update to larger scale with the KUKA 240 robot to explore the collaborative assembly of placing plywood and clips.
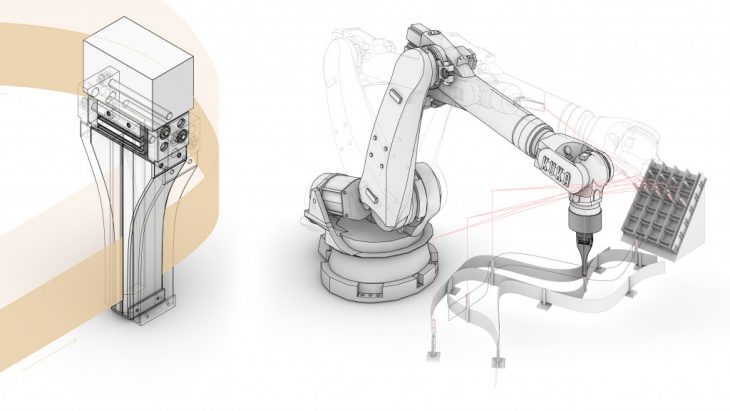
The original end-effector needed to be redesigned due to the thicker material and inaccuracies detected in the earlier tests.
To introduce a more architectural scale, the use of special bendable plywood was combined with the larger scale of the KUKA robot.

The highly precise placement of the clippers is achieved by the robot, the placement of the plywood is manually done in a human-machine collaborative setup.
Fabrication Setup
Beside the assembly of the system manually the upscaling of the robotic fabrication process is thinkable.


Recursive System
To allow for a highly customizable system a script was developed to allow for adjustable number of layers, sheets per layers, visibility through the system, height of layers etc.
The current script focuses on the use as a visual division. Allowing for areas of less visibility through the system and for areas with a maximum of transparency.
Prototyping
During the final presentation, two prototypes were presented.

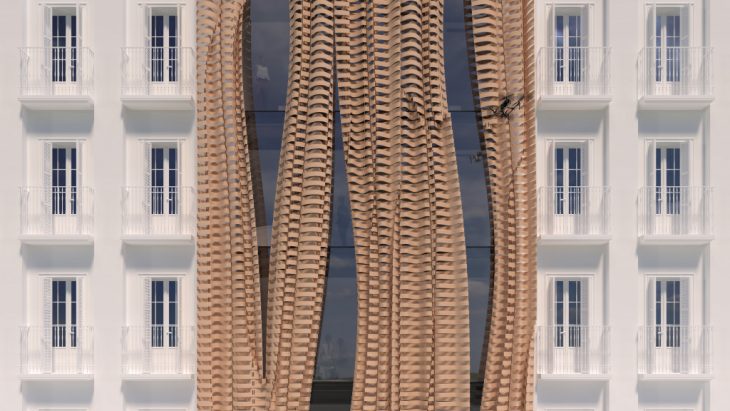
A large frame holding a full scale example of a potential shading element for the use in front of glazed facades and a small scale example of multiple sheets per level for a more sturdy example of a self-supporting structure like a wall or for the use as furniture.
Application
Potential Applications as shading elements for facades, visual division in form of lightweight walls or conference pods, or structural base for parametric furniture.
Potential shading on facades:

Potential visual division in interior spaces:


Future Development
Potential future developments of FIBULA ROBOTICA include:
1. Explorations for Mini-Builders
(autonomous collaborative small-scale robots)

2. AR-supported immediate-on-site-design and assembly
(Augmented reality App for holo-lens or handheld devices)

3. Advanced Robotic Sensing
(sensor support by 3D-scanning, camera-capture, end-effector with revolution-encoding)
Documentation
Link to the video of the experiments for a fully automated assembly of small scale prototypes on IAAC’s ABB robot:

Link to the video of the experiments for a robotically aided assembly of larger scale prototypes on IAAC’s KUKA robot:

FIBULA ROBOTICA is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at the Master of Robotics and Advanced Construction program in 2020/21 by:
Students: Hendrik Benz, Michael DiCarlo, Aslinur Taskin
Faculty: Alexandre Dubor, Raimund Krenmueller
Faculty Assistant: Roberto Vargas
