Dynamic Space Configuration using Evolutionary Solver and Machine Learning
In the Digital Matter Studio 2018, we developed a spatiotemporal localization sensor with which one can map occupancy and spatial behavioral patterns of inhabitants in a space. This sensor can be mounted on the floor and works with various kinds of top flooring materials.
The occupancy pattern, when overlapped with other spatial information such as Sunlight, Temperature and visual connectivity can give a cohesive and holistic spatial performance overview. Based on this information many spatial issues can be revealed – like pedestrian bottlenecks, spatial congestion, ignored/disdained spaces as well as accident-prone areas.
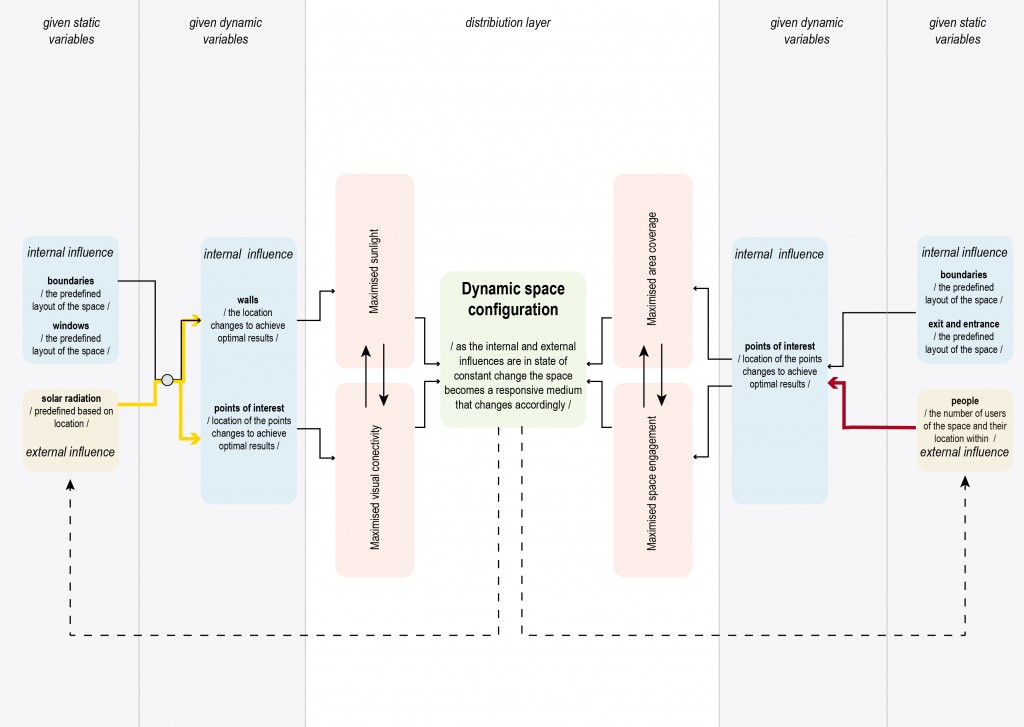
One of the solutions to some of these problems is ‘Dynamic Space Configuration’; where the spatial the arrangement of any item in a space is computationally decided, based on the aforementioned parameters. For this computational exercise, the factors taken into considerations are sunlight, visual connections, and frequent pedestrian paths.
These three factors are individually developed and simulated using various computational tools. Below is a pseudo-code explaining the computational approach.
For Sunlight analysis setup, a pre-defined space is considered with a given amount of facade openings. The internal partition walls are generated computationally, where the orientation, size, and location of the walls are optimized to maximize total sunlight hours.
‘Ladybug tools‘, an Environmental analysis tool and ‘Galapagos Evolutionary Solver‘ plugin for grasshopper is used.
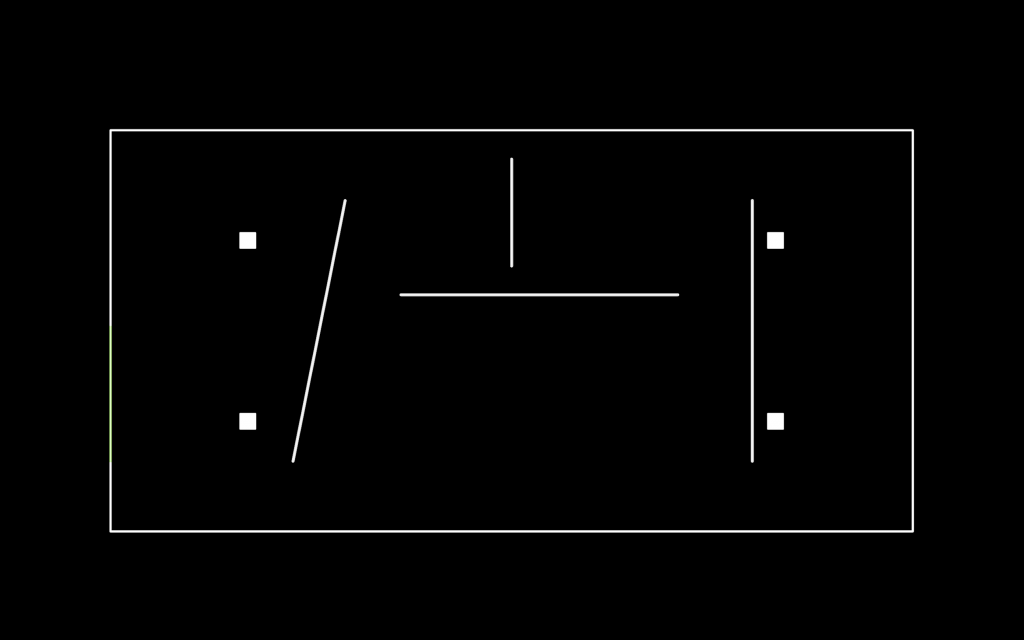
Base space with fixed Boundary and window size
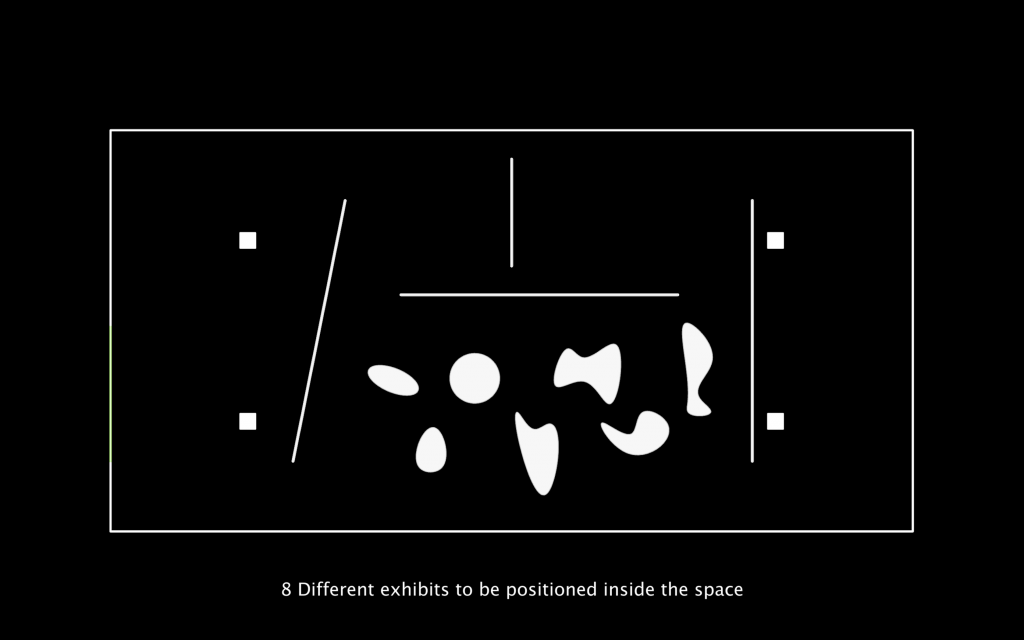
8 different exhibits to be positioned inside the space
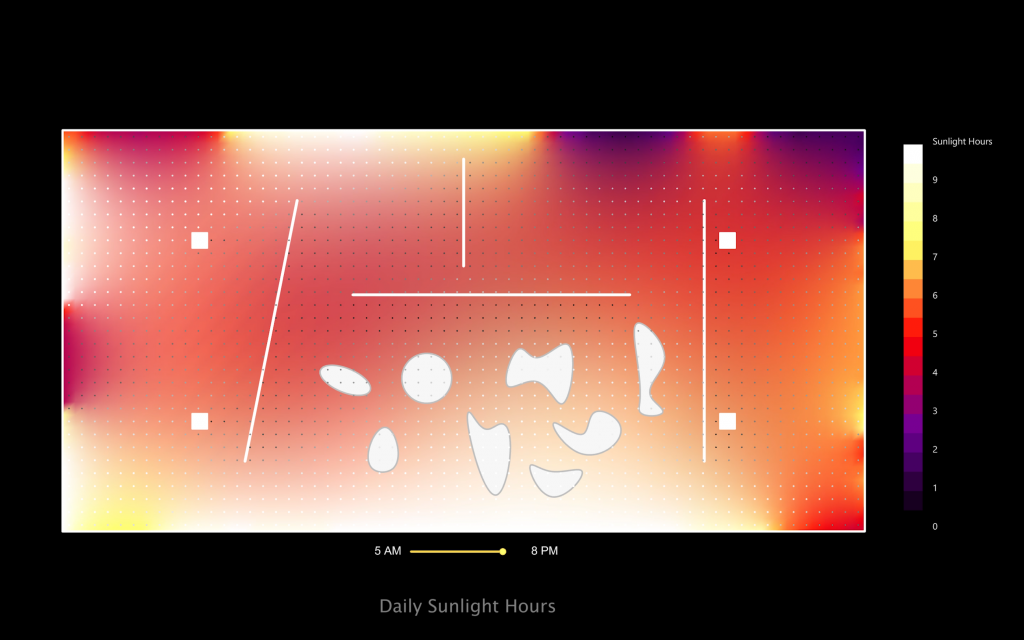
Sunlight hours

Moving partitions based on Sunlight Hours
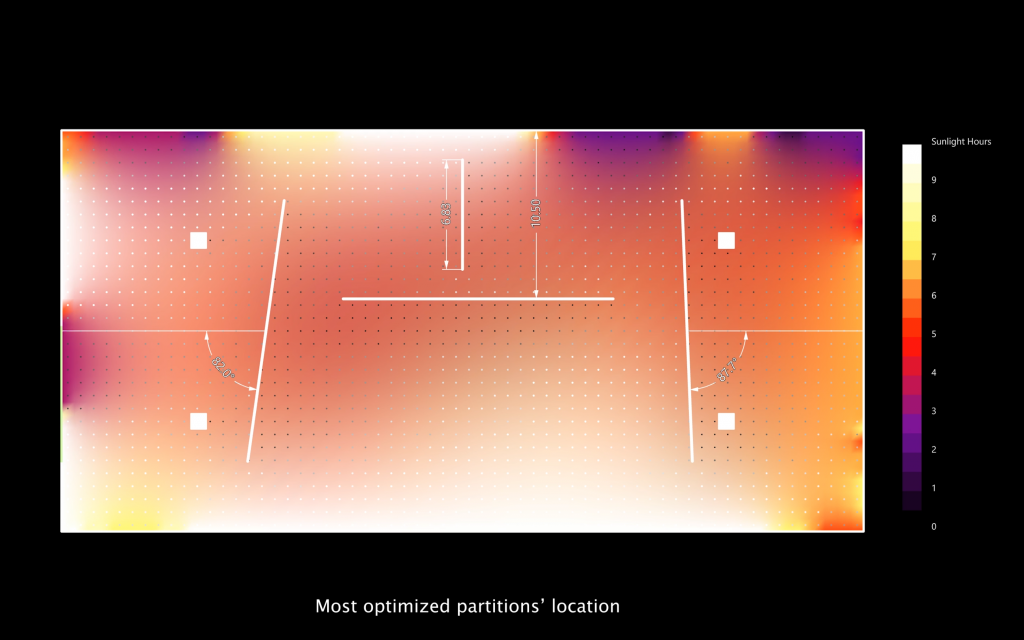
Optimized internal walls
Further, to maximize Visual connections of given 8 ‘areas of interest’, the evolutionary solver is used again. The ‘interest points’ are allowed to freely move inside their given space, until a maxim overall visual connectivity is reached.
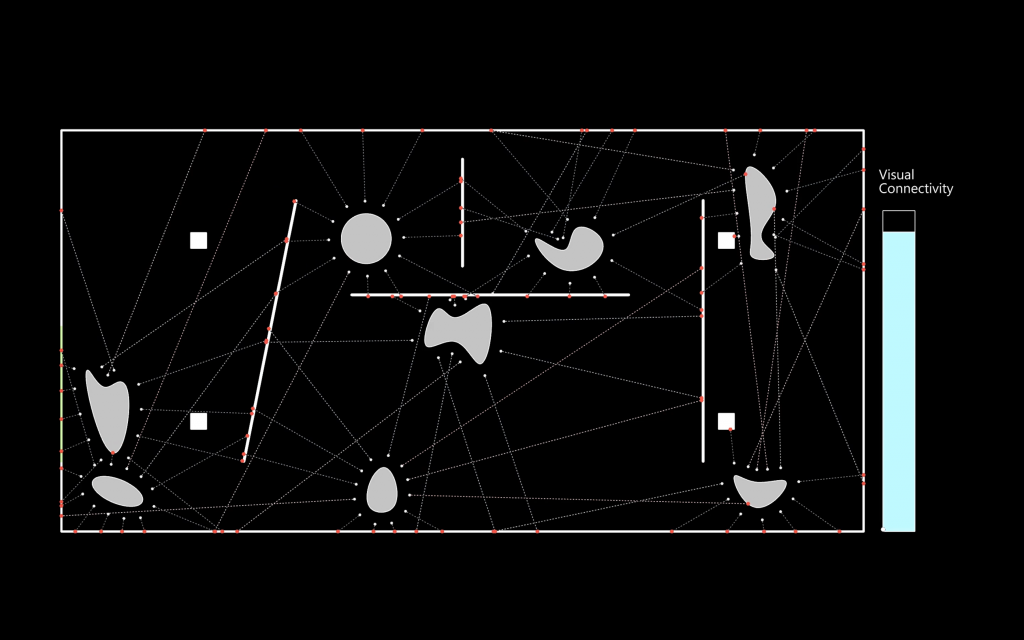
Moving exhibits based on visual connections
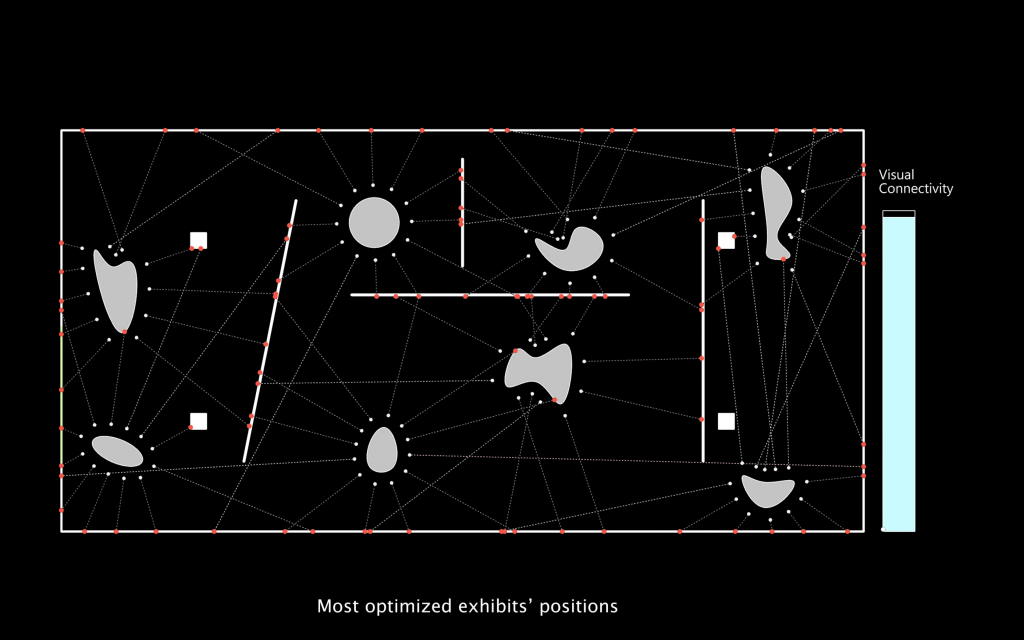
Most optimized locations
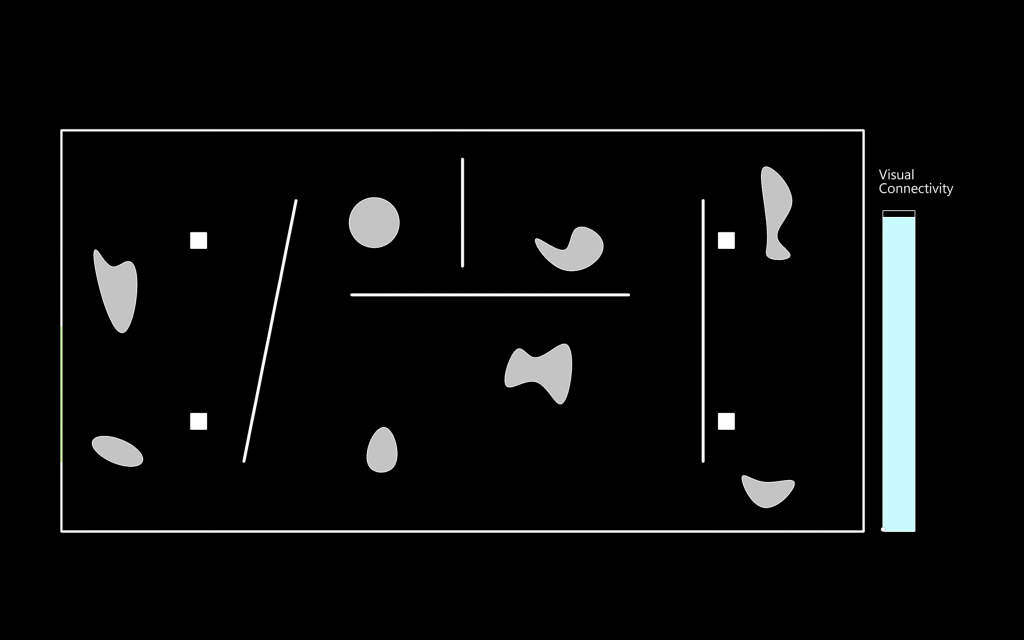
Final locations
An alternative approach is explored for placement of areas of interest. Realistic pedestrian paths are generated using Pedsim plugin and these paths are then analyzed for space usage and engagement. This information along with locations of ‘points of interest’ is recorded for ten or more iterations. With the collected information a neural network is trained, using OWL. The trained neural network can predict the location of points of interest for a given input of a) Simulation Runtime b) required Space usage and c) required Space engagement.
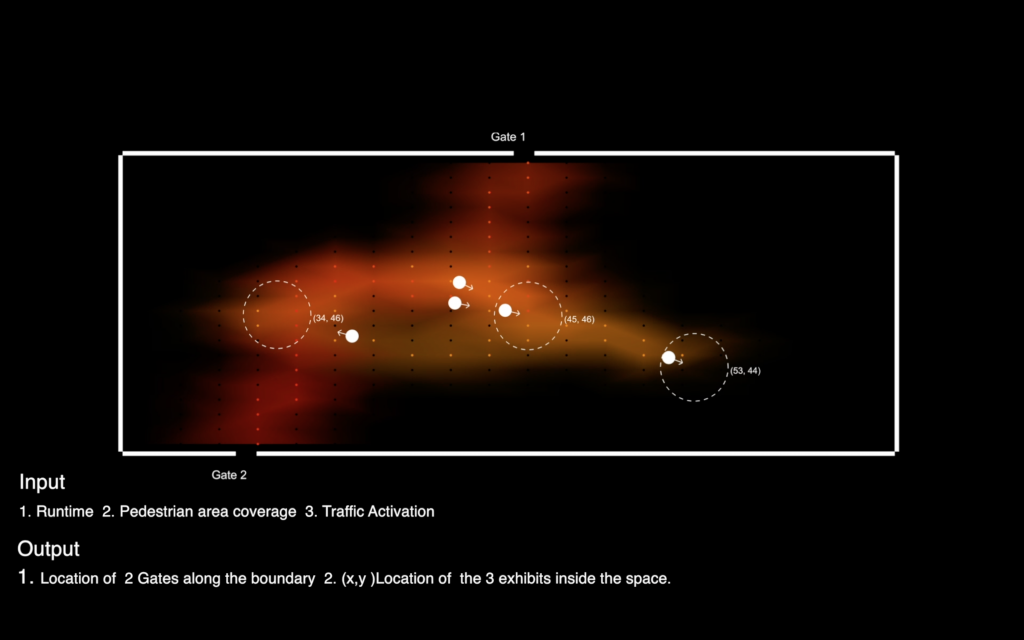
Collecting Training data – Inputs and Outputs
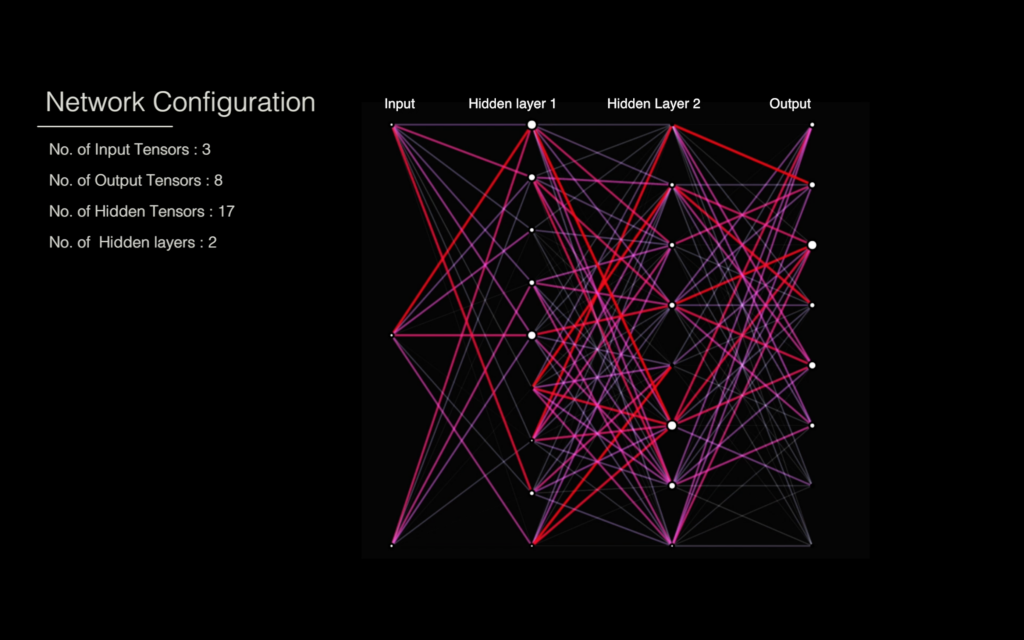
Building Neural Network
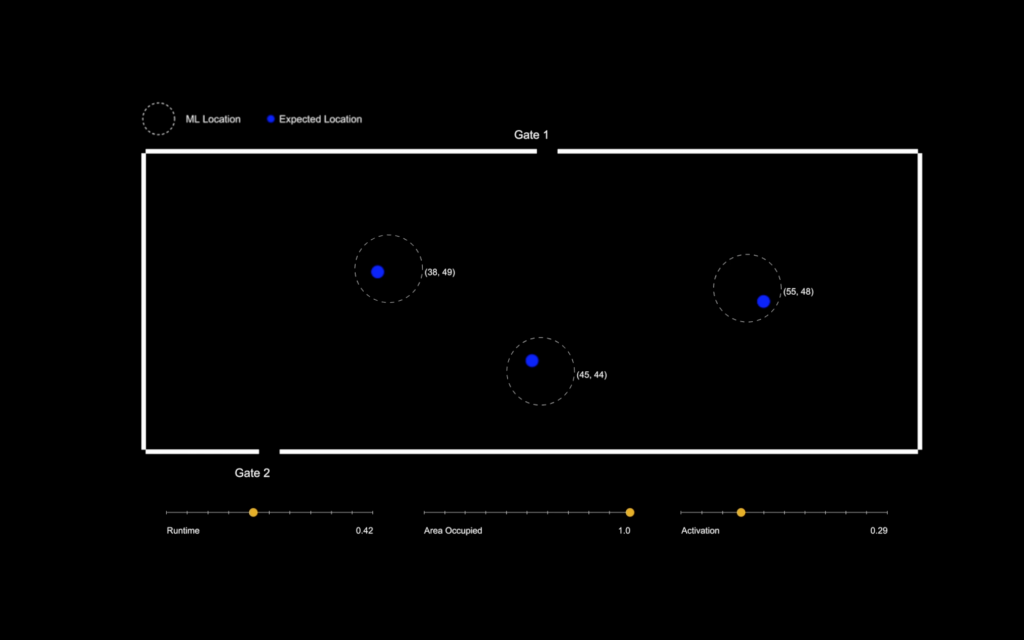
Checking accuracy of ML output
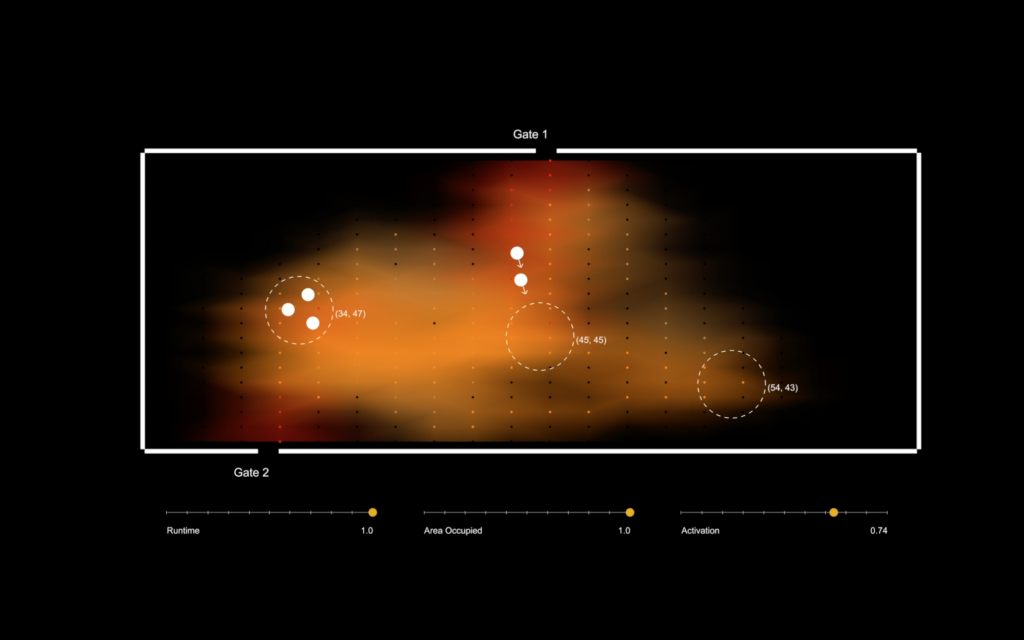
using ML to predict locations
Computational Design Assignment
Institute for Advanced Architecture of Catalonia
2018
Faculty: Aldo Sollazzo, Rodrigo Aguirre
Students : Shruti Jalodia, Hayder Mahdi, Nikol Kirova