DATA-DRIVEN IMMEDIATE ASSEMBLY // SOFTWARE I SEMINAR
Data-Driven immediate Assembly is a project developed during the Software I Seminar of the MRAC-20/21. The course reveals the main differences from the conventional methods of architectural creation by focusing on the bottom-up approach. This project was driven by the idea of working with inflatable architecture. Starting with the smallest part of a structure shaped by a flexible membrane and some ridged couplers to allow for the aggregation of many similar discrete elements.
Design Hypothesis
Driven by the idea of working with inflatable architecture.
By creating elements shaped by a flexible membrane that holds pressure and some simple connectors to allow for the aggregation of many.
Above: the first attempt of an inflatable system.
Data and Replacing the Random
The focus was to create the underlying data by ourselves instead of using third-party data-sets.
This data will drive the future aggregation and shape its way of expanding in a given boundary.
Multiple potential sources of data were investigated.
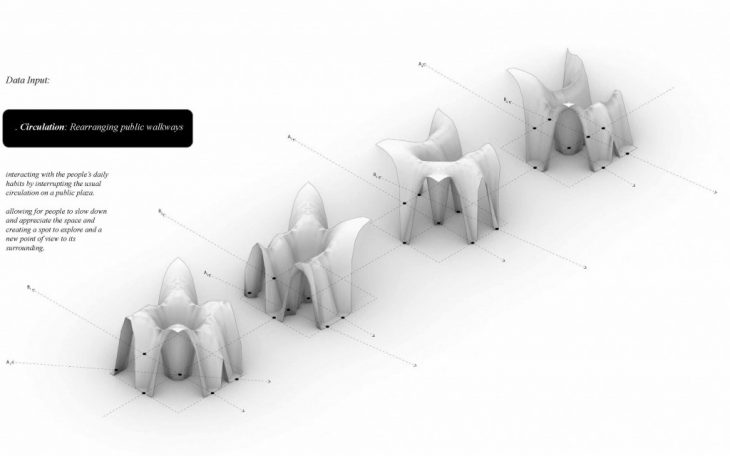
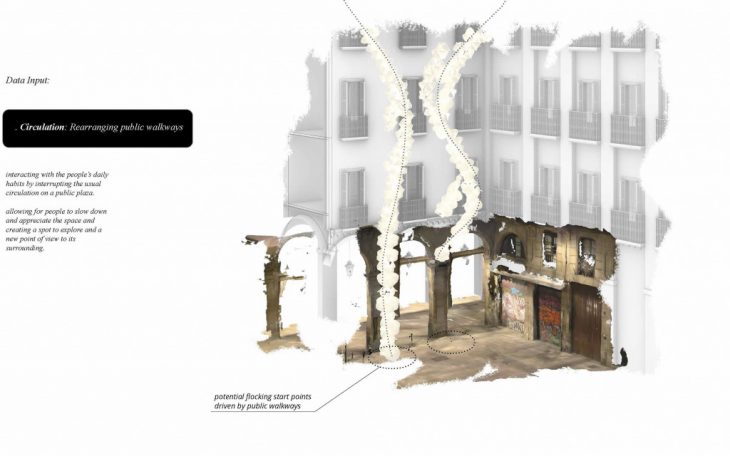
As the self-set goal was to create an installation for a public space we decided to go for tracking walk paths and use this data to either interact, disrupt, or slow down people’s paths.
Grid and Flocking
The focus was to create the underlying data by ourselves instead of using third-party data-sets.
This data will drive the future aggregation and shape its way of expanding in a given boundary.

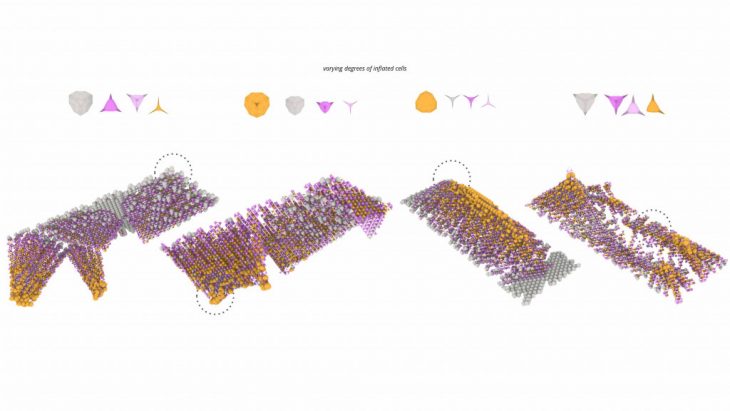
Started exploring by flocking within a 2-dimensional quadrant-grid and expanding around attractor points, the design eventually evolved in flocking within a 3-dimensional tetrahedron-grid.
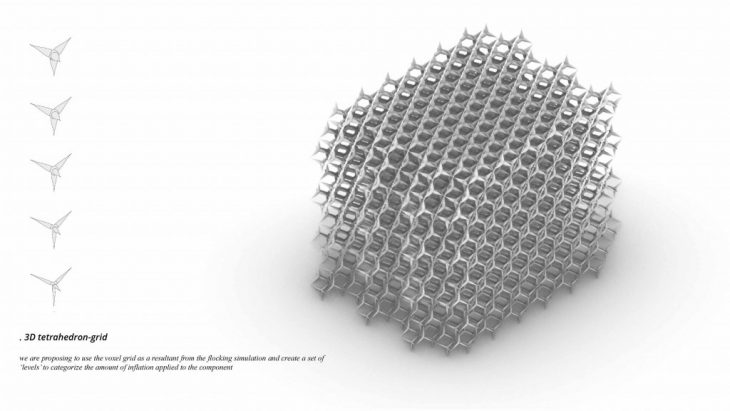
The idea is to allow for a more dynamic appearance even in dense areas of this tetrahedron-checkerboard.
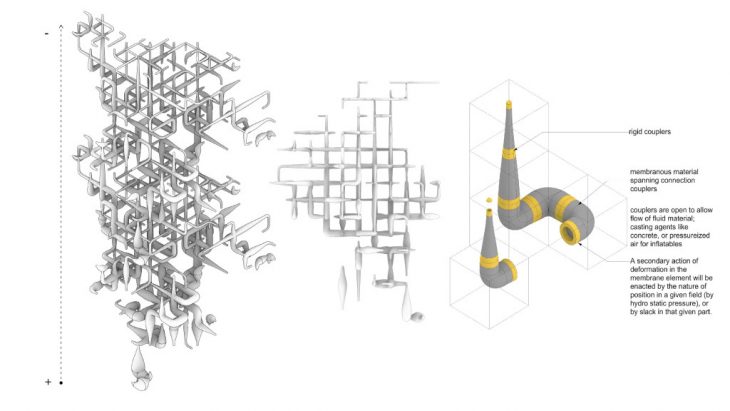
Components
The components are based on the tetrahedron shape and the main shape is formed by the flexible mesh.

To allow for connecting a large number of components the connectors in each corner of the tetrahedron are designed to allow connection in every direction of the tetrahedron checkerboard.
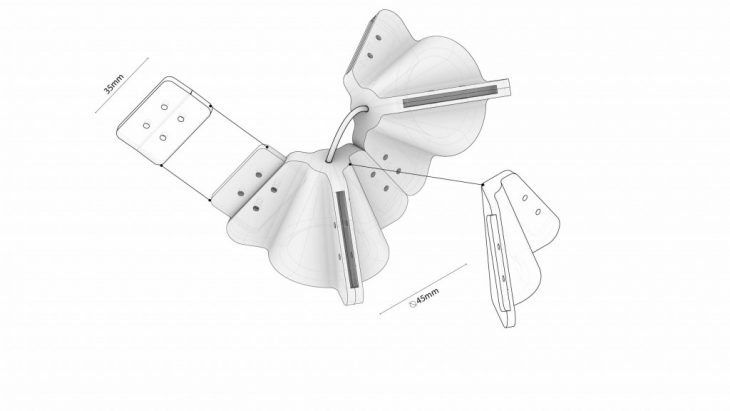
Structural support of the installation is given by attaching to its surrounding – Floorslab, adjacent buildings, balconies.
To test the materiality of the design, the connectors were 3D-printed and first prototypes from paper as inflatable material were further explored.

Iterations
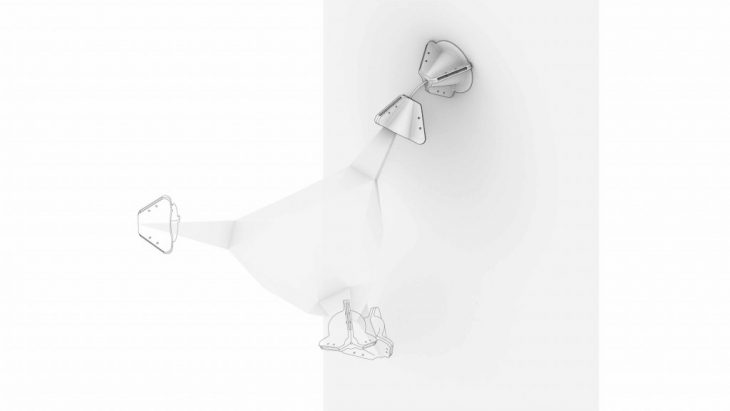
The prepared Grasshopper script was run several times to have a variety of versions to select from.
The diagram above shows a perspective view of the aggregated components on the left and a floorplan of the flocking lines on the right.
Different boundaries were explored – vertical and horizontal ones. A set of aggregations distinguishing a change in attractor and repulsion parameters.
Starting points (anchor points) and the goal points have been changed for each version to produce a completely different outcome. the envelope is the only constant.
Real-World Application
To demonstrate the capabilities of the design further a location within Barcelona was proposed.
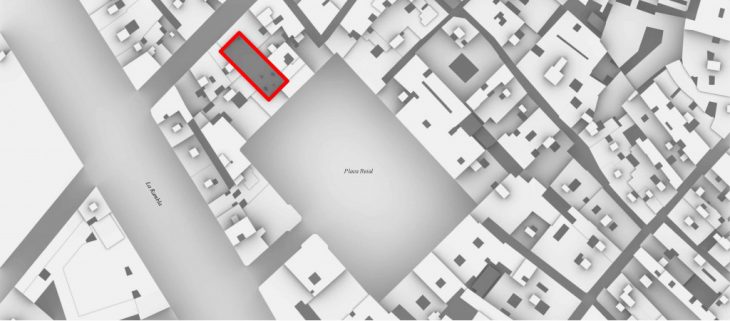
The proposed site for the installation is located in the heart of Barcelona next to Placa Reial.
The location belongs to the Gothic-Quarter and is located immediately next to the famous La Rambla.

The site was scanned and replicated in 3D.

The iterations are based on the paths of how people use the space currently and how they could be using the space when the installation is in place.
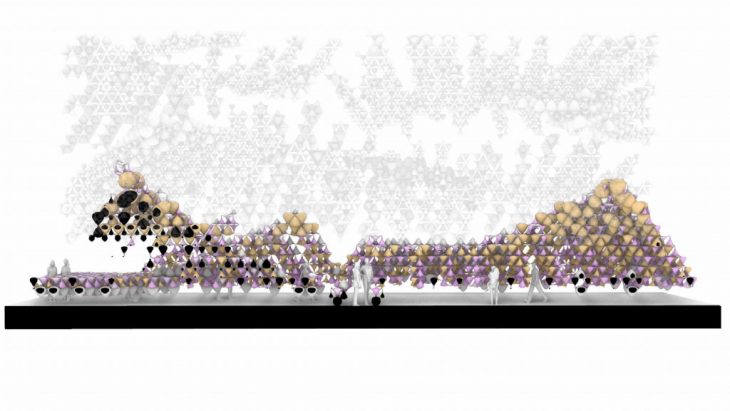
Proposed Installation
During the LLUM Festival in Barcelona, the proposed installation could highlight some of the void spaces within Barcelona.
The mix of inflatable structures combined with light allows for large scale but light-weight walk-in art installations.
The installation is meant to force people to stop and enjoy the urban space.

Like a living and breathing object within the urban context, the installation is inviting to slow down and appreciate the moment and the adjacent surrounding.

Project Files
Click HERE to view the project’s Github-page including all Grasshopper scripts:
DATA-DRIVEN IMMEDIATE ASSEMBLY // SOFTWARE I is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at the Master in Robotics and Advanced Construction in 2020/2021 by:
Students: Hendrik Benz, Michael DiCarlo, Aslinur Taskin
Faculty: Ján Pernecký
Faculty Assistant: Eugenio Bettucchi
Image References/ Copyright:
https://www.shinichimaruyama.com/nude
https://www.rutasconhistoria.es/loc/la-calle-del-bisbe-o-del-obispo
