Separated Physical Collaboration
Introduction
In today’s world, remote collaborations are in an unprecedented increase in use, new digital platforms to facilitate remote interaction are at their peak, based on these new living conditions, we ask ourselves How to work on a physical project together?
References
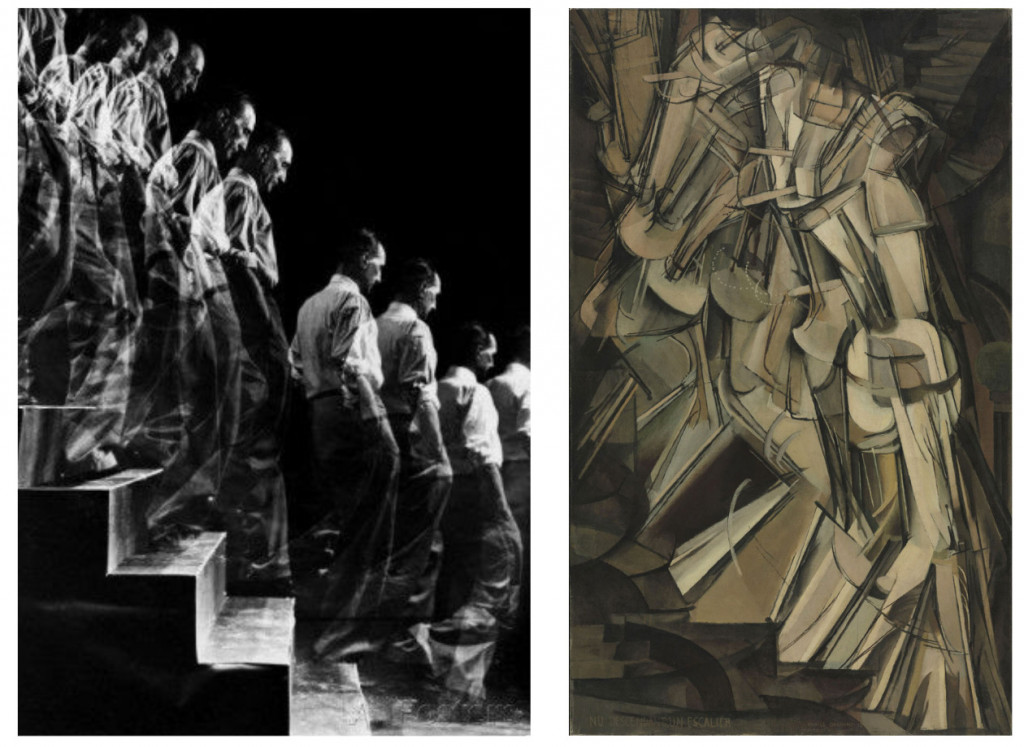
Marcel Duchamp
- Study of phases of motion
- Nude descending a staircase
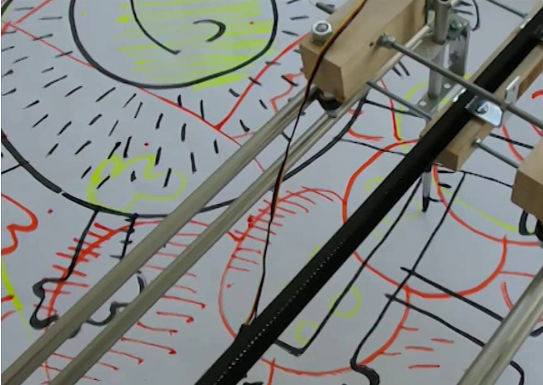
- Arduino Painting Machine
- Heather Hansen – Emptied Gestures

- Robot Artist Quincy

Concept
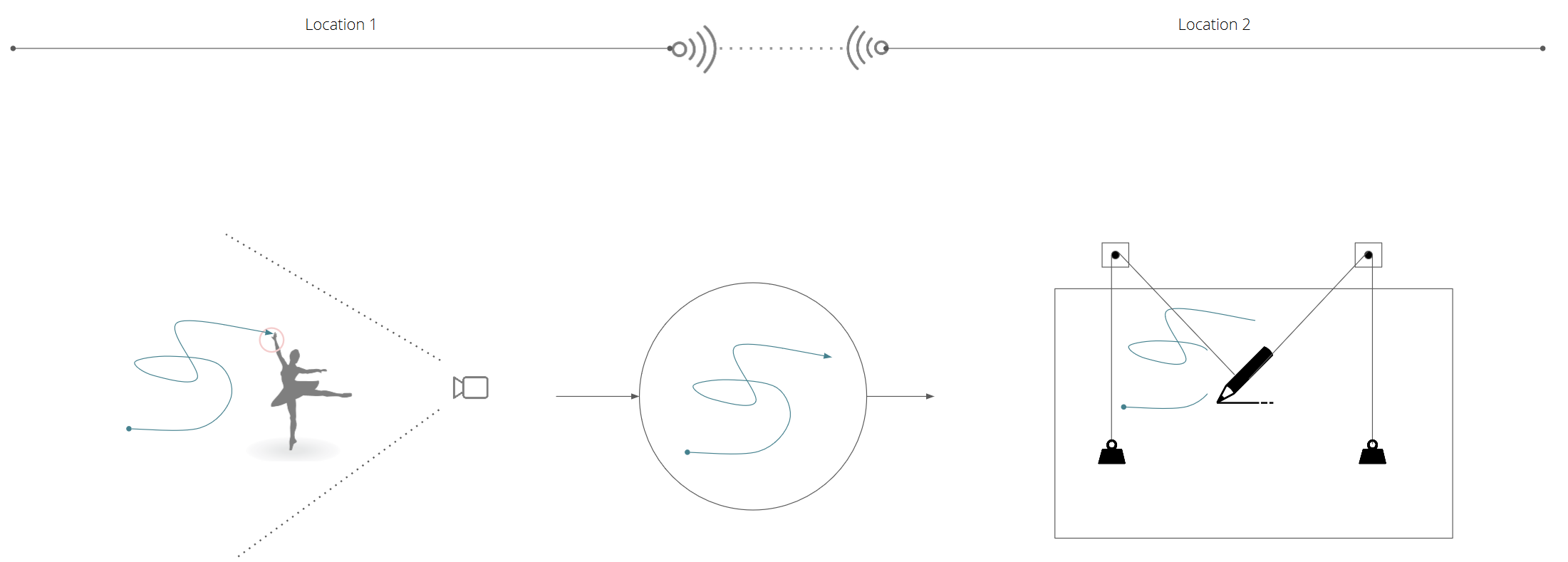
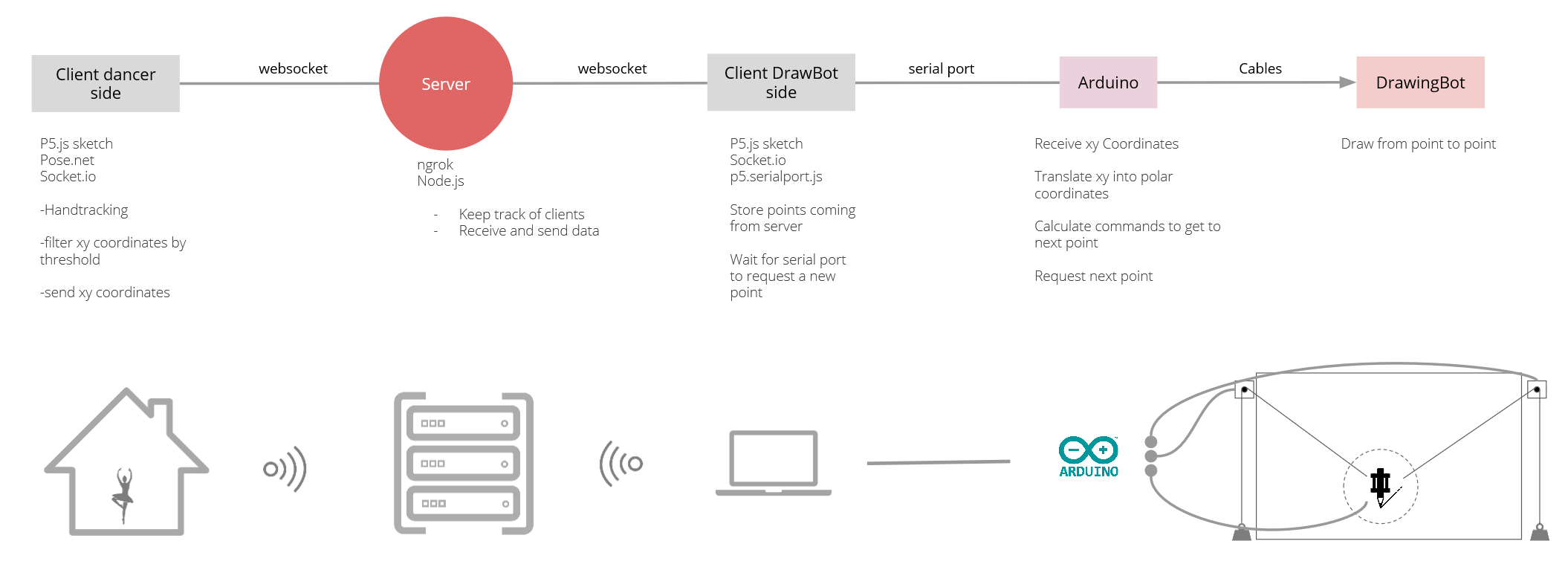
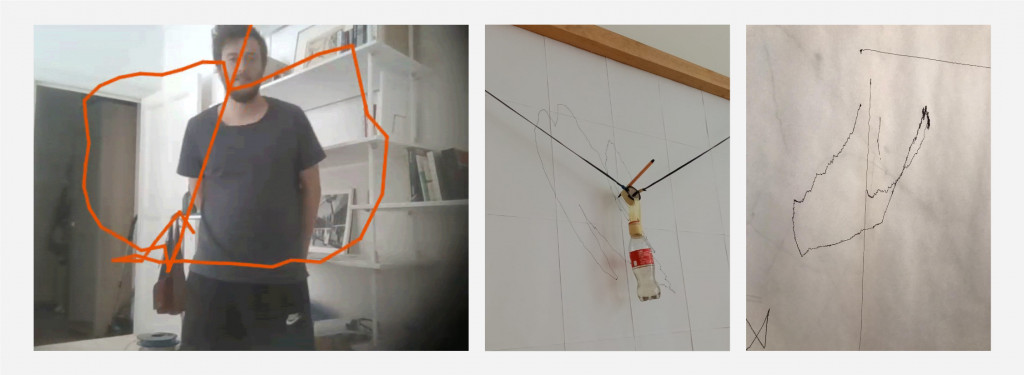
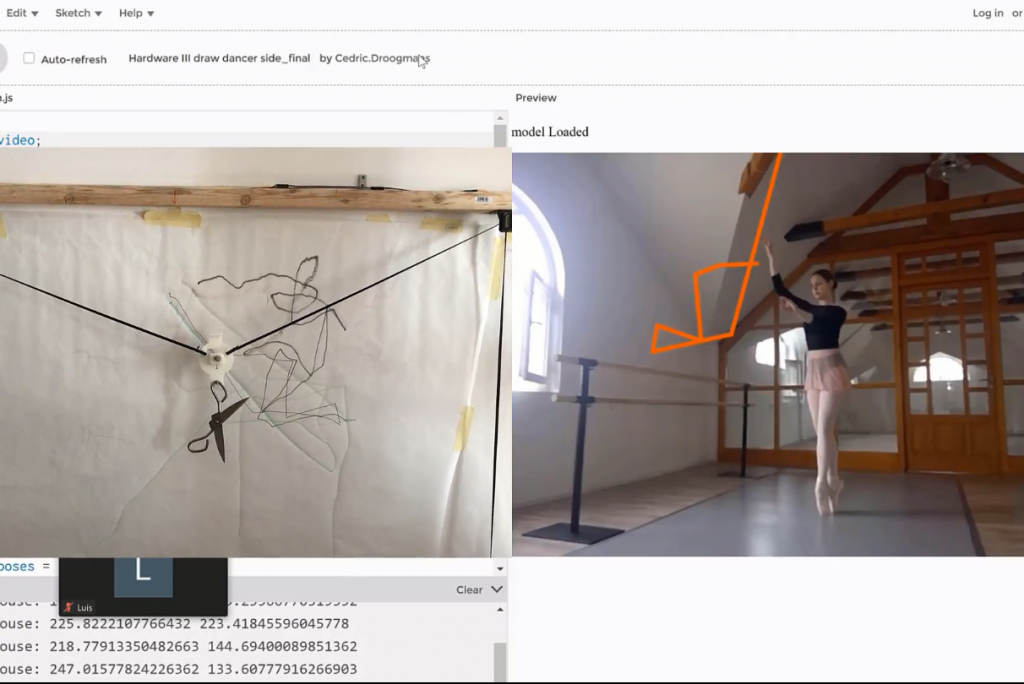
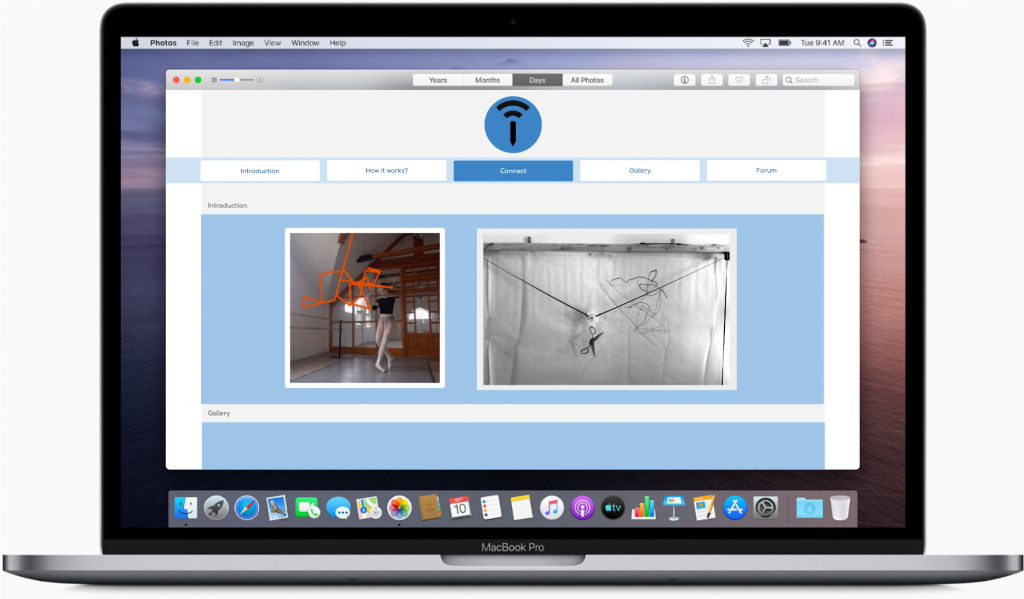
Using a webcam to trace the hand movement of a dancer present in certain location and then installing a polar plotter in a different location to reproduce the path of the artist’s movements
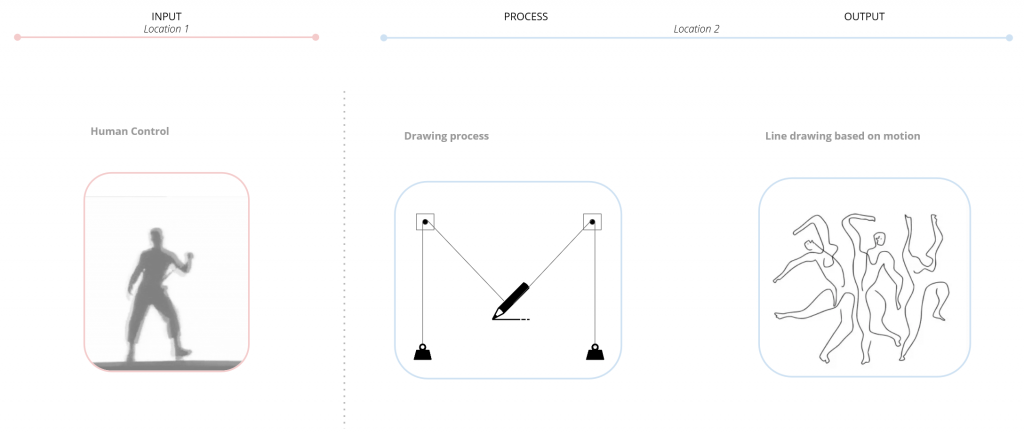
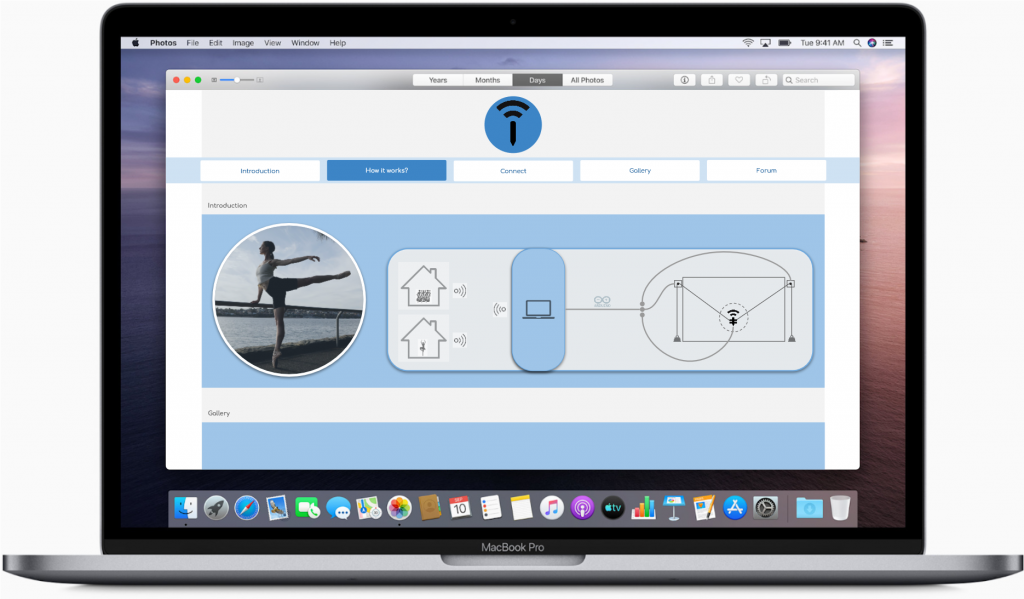
Basic setup
Human control: Dance
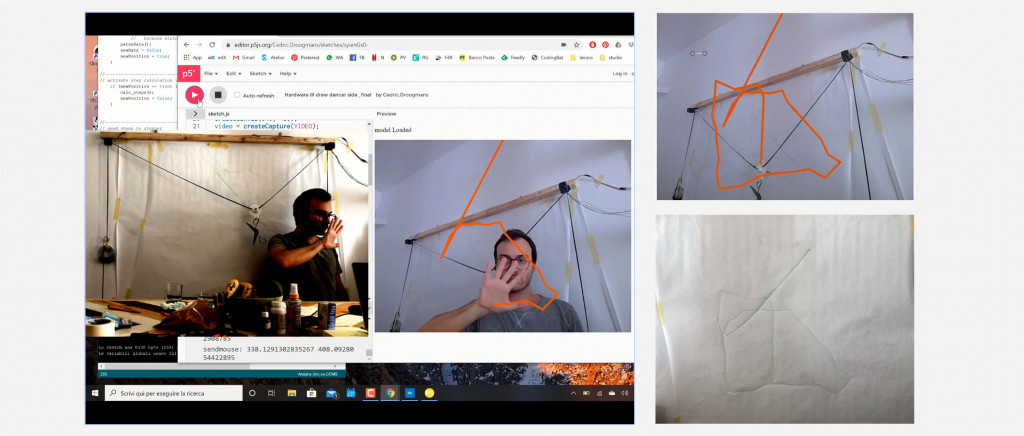
Software
Everything that is happening online is programed in the p5.js webeditor. Using Node.js to setup a server, socket.io to create the websockets to communicate between the different clients,
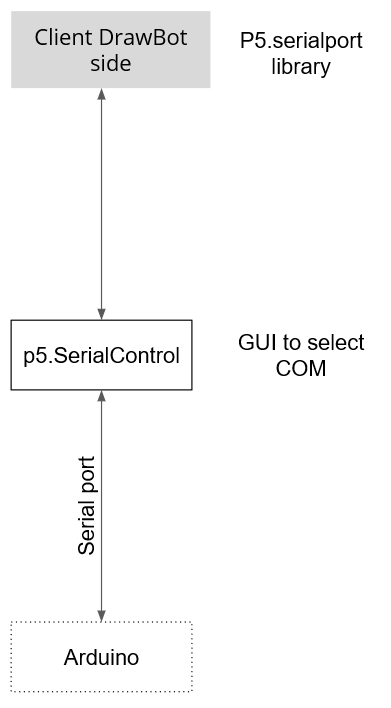
and ngrok to tunnel the port of the server. To communicate between the arduino and the DrawBot side we are using p5.serialcontrol.
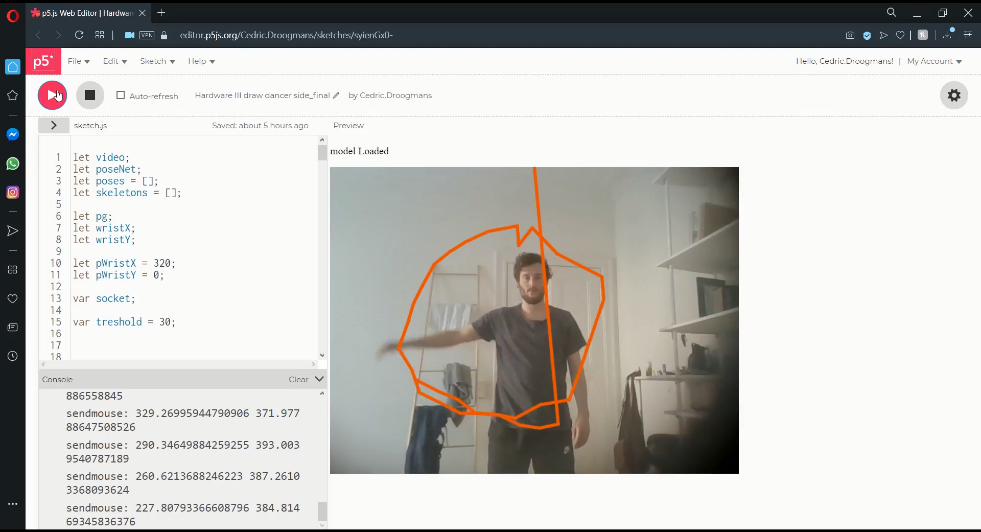
Drawing with wrist – P5.js / Pose.net
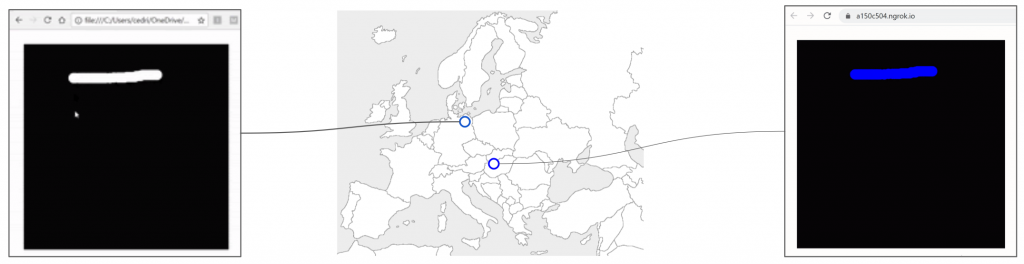
Connecting laptops – First Test
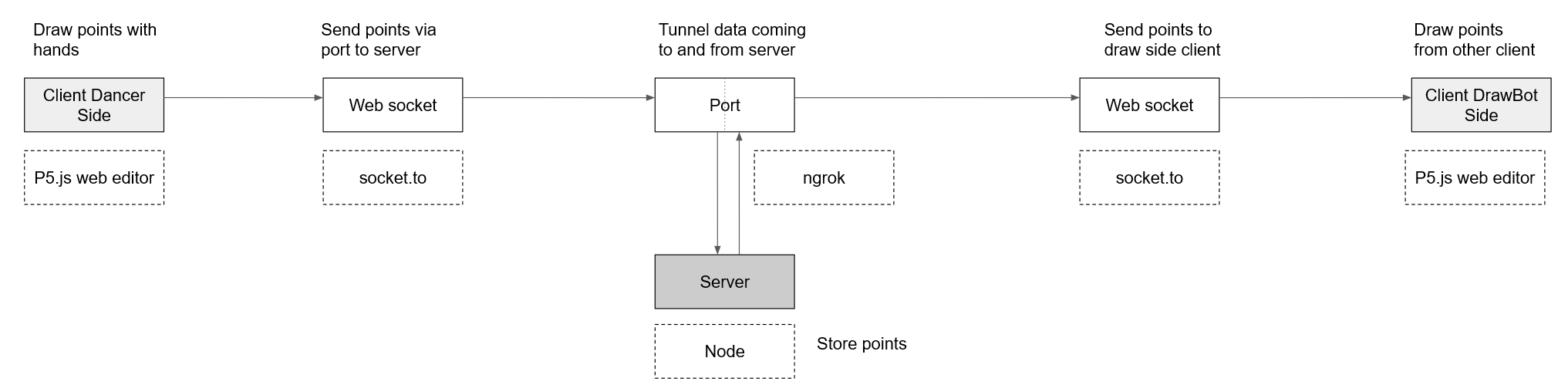
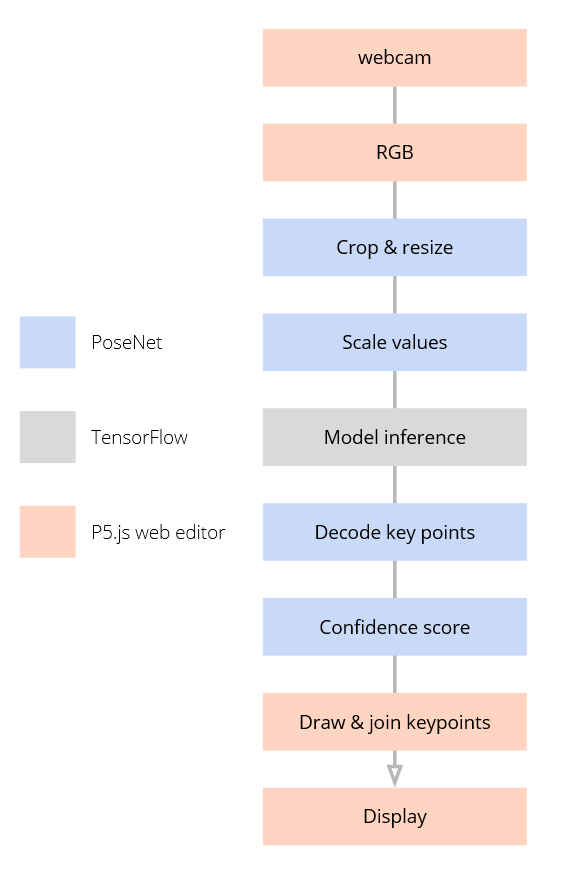
Pseudo code flowchart
https://editor.p5js.org/Cedric.Droogmans/sketches/syienGx0-
https://editor.p5js.org/Cedric.Droogmans/sketches/MUZqmLO2C
Sending data to Arduino
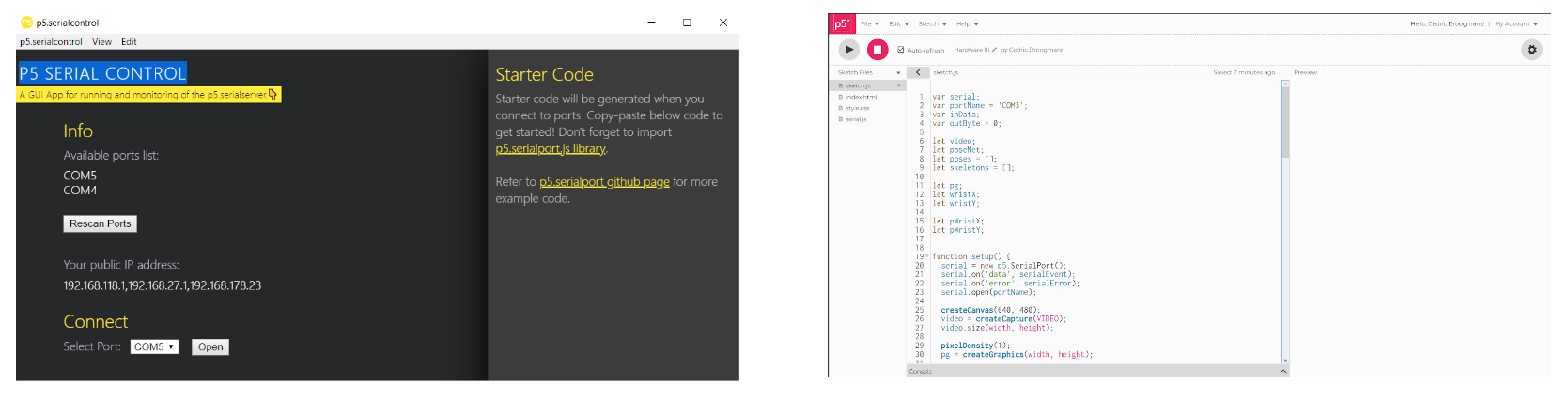
P5 SERIAL CONTROL
Arduino
Data Cycle

Polar coordinates

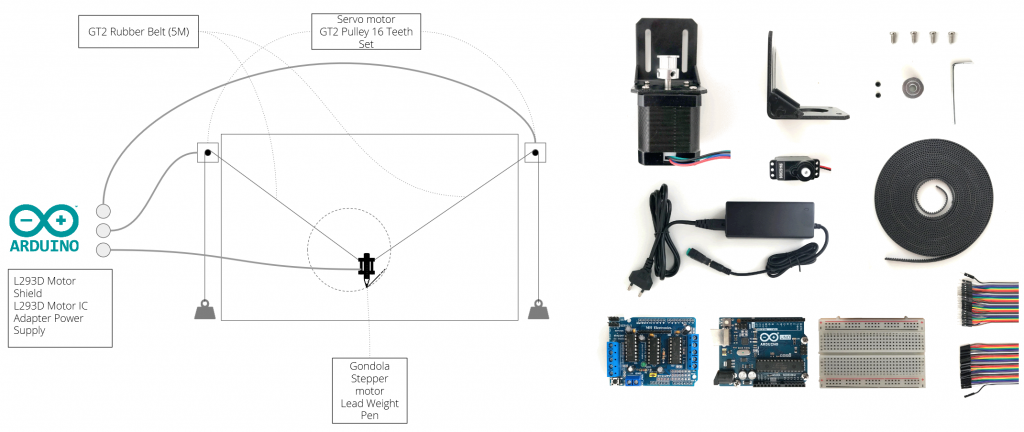
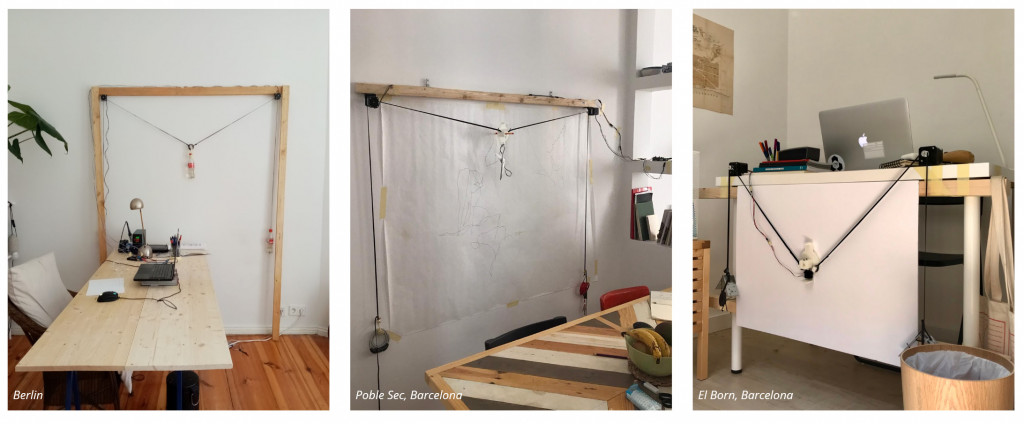
Hardware
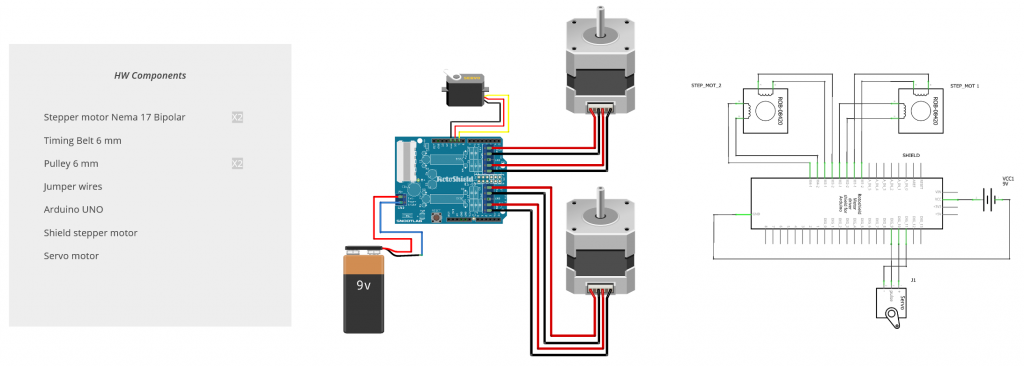
Materials used: Stepper motor Nema 17 Bipolar Timing Belt 6 mm Pulley 6 mm Jumper wires Arduino UNO Shield stepper motor Servo motor
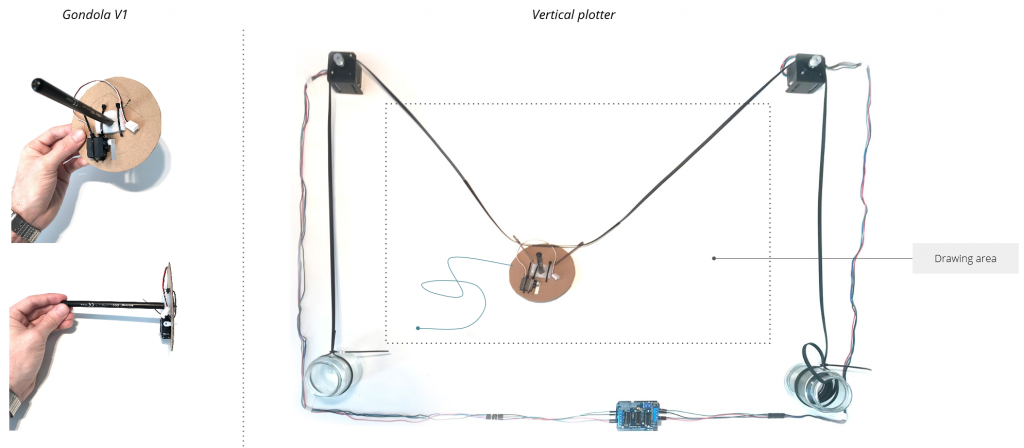
Drawing cable robot
Assembly
Fritzing / wiring
Gondola – V1
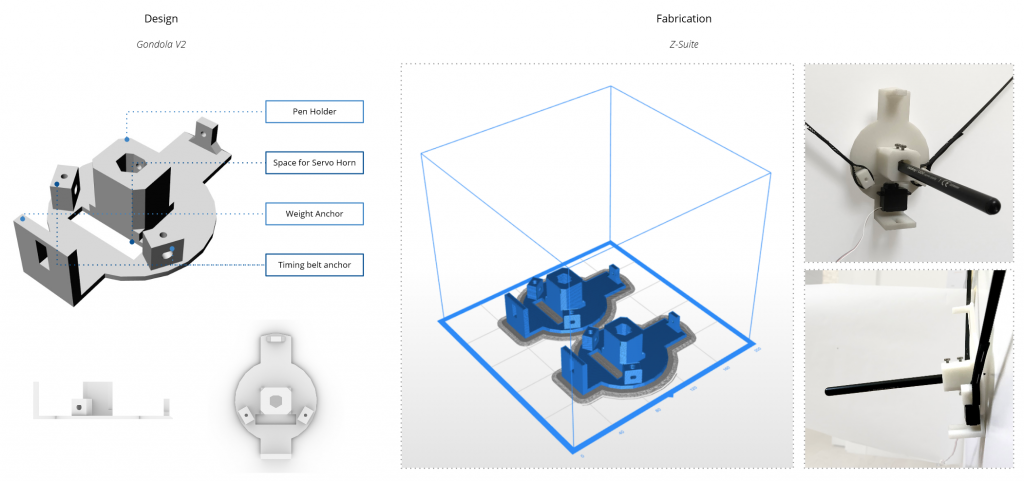
Gondola V2
Fabrication – 3D printing
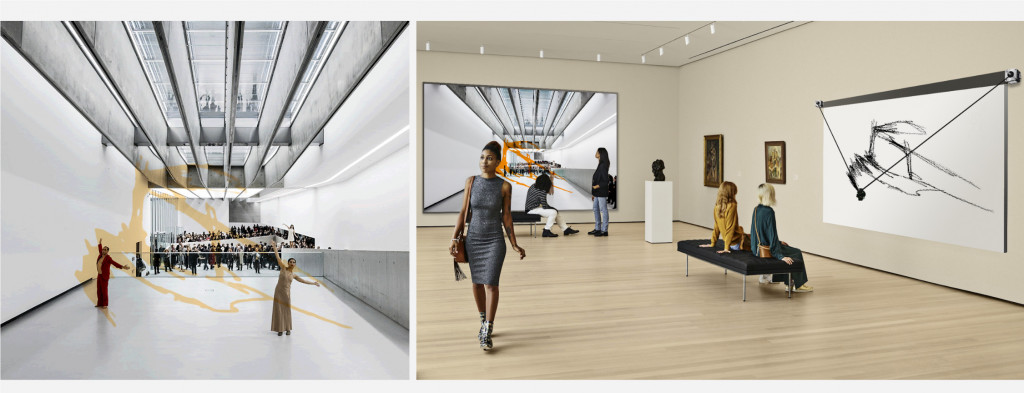
Locations
Setups Variations
Robot drawing style
 a
a
Experiment 01
Experiment 02
Comparing results
Experiment 03
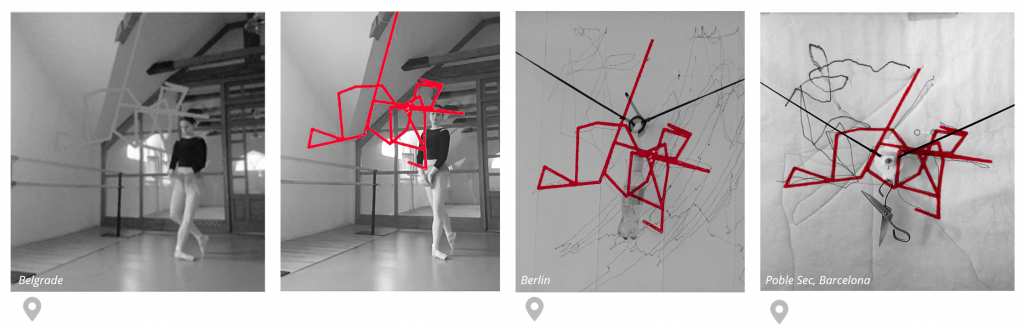
Experiment 04
Future additions
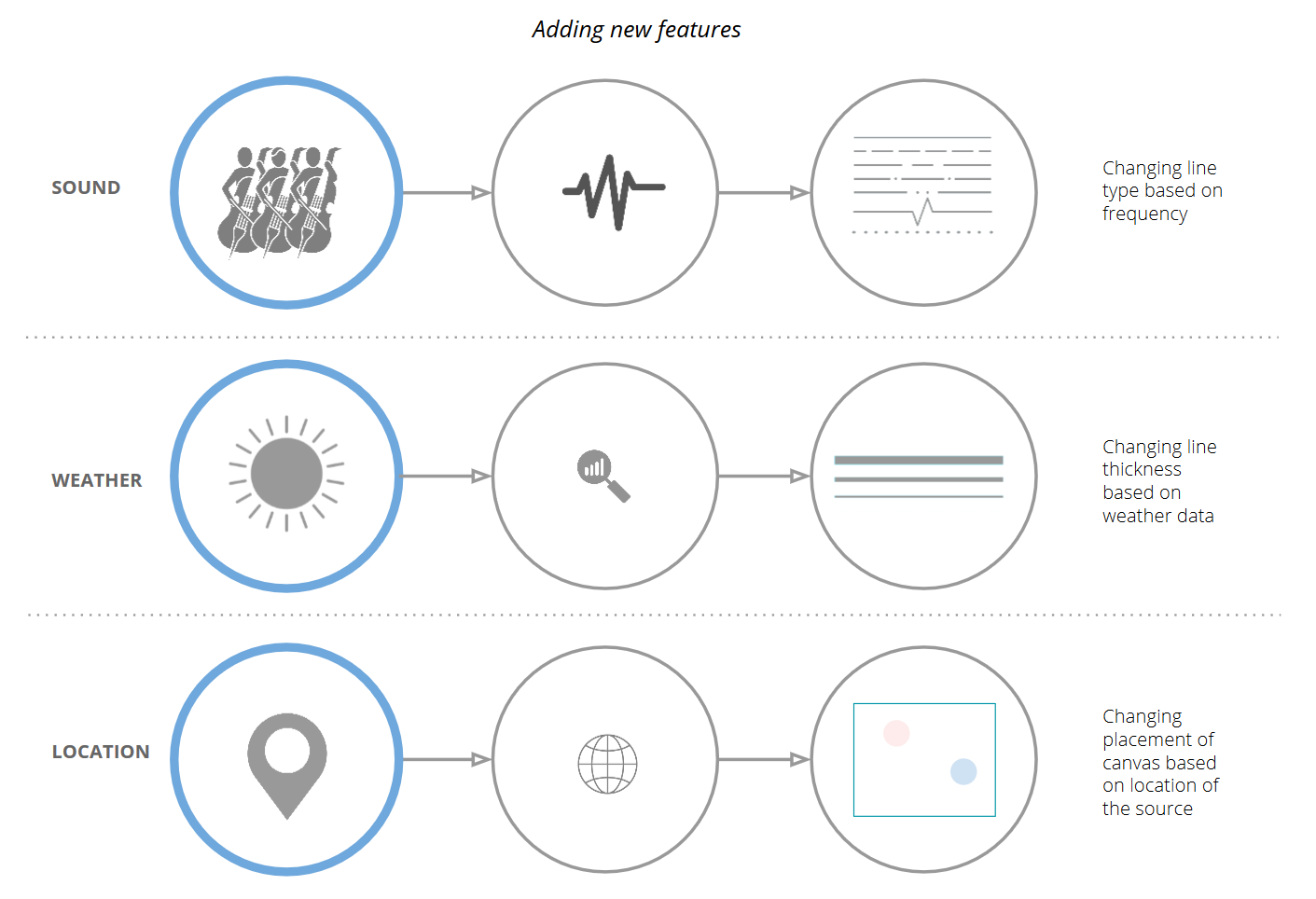
Improvement of User Experience
Real time Art Performance
Faculty:
Angel Muñoz & Agustina Palazzo
Students:
Lorenzo Masini
Cedric Droogmans
Elena Jaramazovic
Luis Jayme Buerba
GitHub:
https://github.com/cedricdroogmans/Dancing_Apart
Useful links:
https://nodejs.org/en/
https://expressjs.com
https://ngrok.com