Craftsmanship Machine Soulfulness
Introduction
This project aims to explore how robotic fabrication and craftsmanship join together in developing an architectural system. The growth of this system is based on aggregation strategy defined by a set of specific rules and controlled parameters.
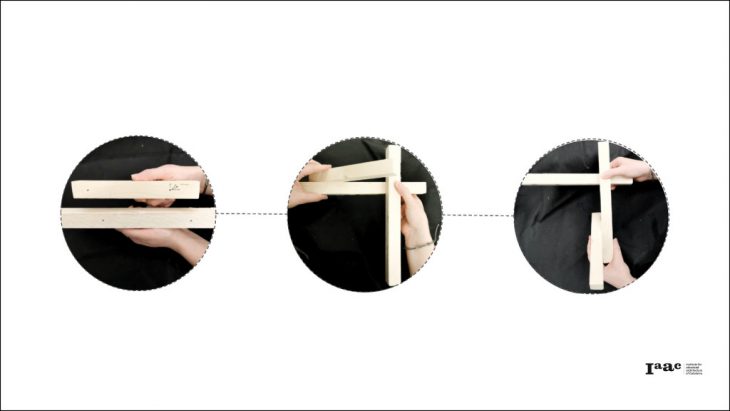
Physical to Digital
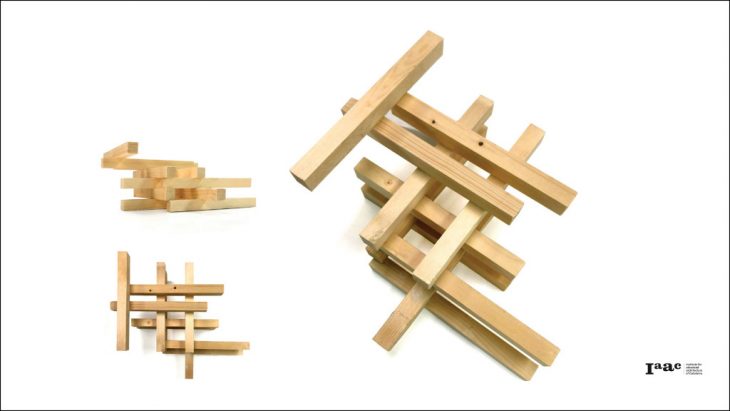
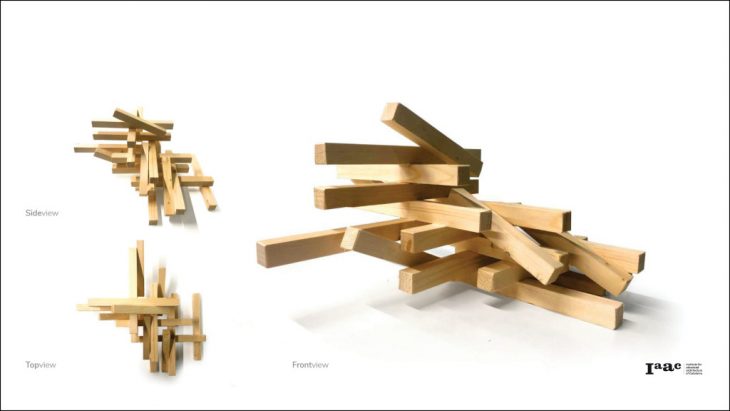
Wood blocks were used to create the assembly. The lengths of the pieces are 20cm and 30cm respectively. By conducting manual experiments with the physical elements, we were able to explore their structural and geometrical behavior.
From this study, we chose to use a module and set the rules for growth.
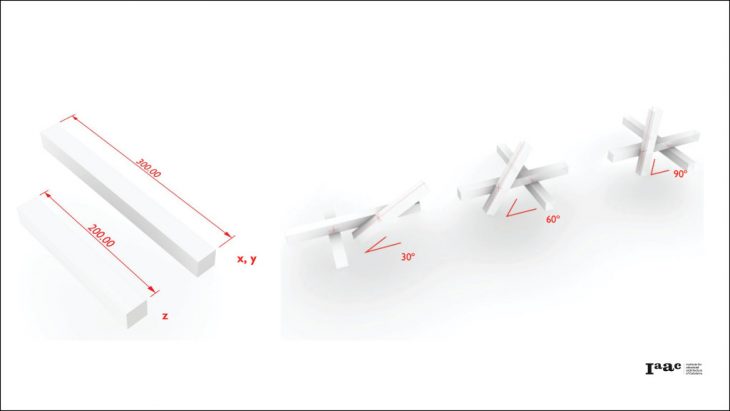
- Each module is consisting of 3 blocks – two long (30cm) blocks and one short (20cm) block.
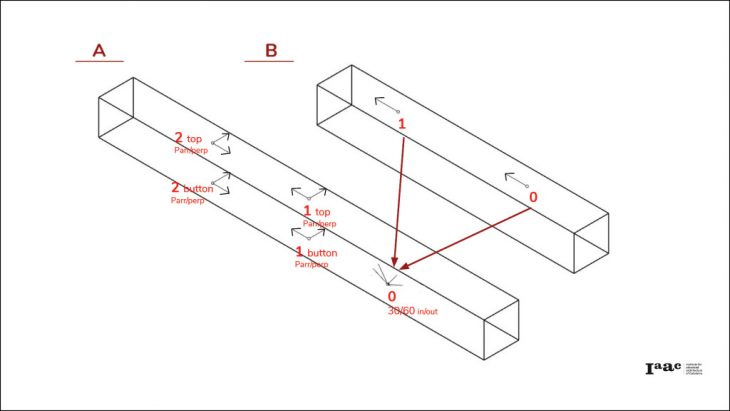
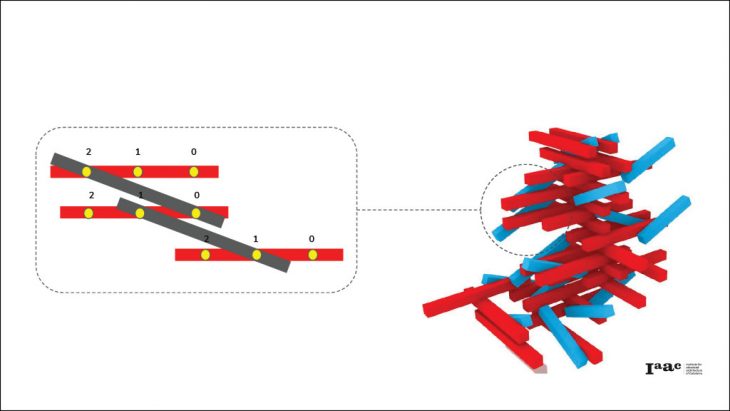
- For the connection points, each block was virtually split into three pieces, which gives the option for two internal connection points on each face.
- The 30cm blocks are always perpendicular to each other, which allows growth only on the Y and X direction.
- The 20cm block of the module grows on a 30°, 60°or 90° on the Z direction and it is connected to the side of the longer block.
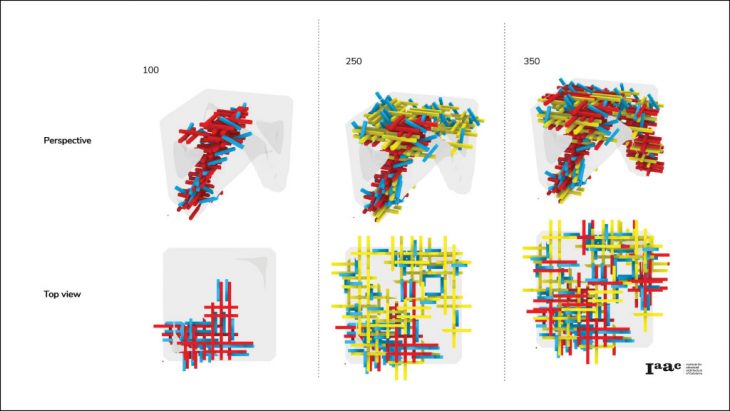
Digital Aggregation – Computation
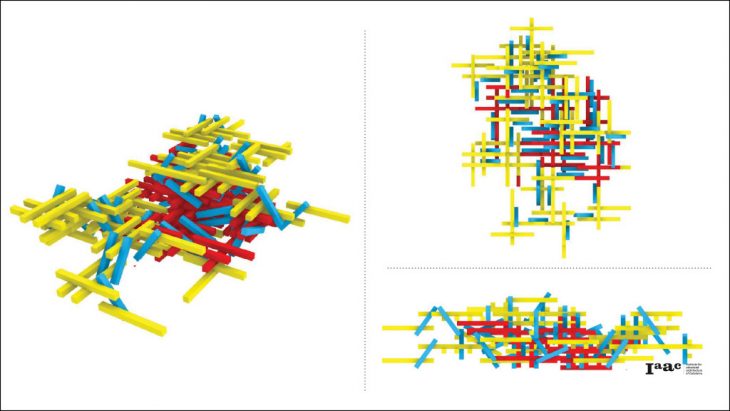
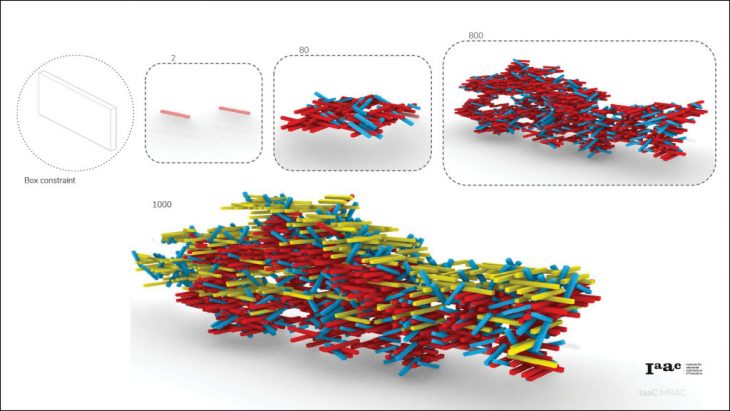
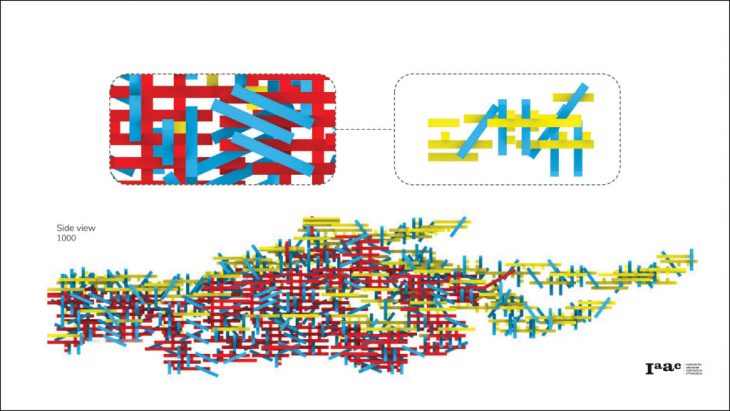
All non-self-intersecting combinations of these modules were generated geometrically. Rather than explicitly choose a series of modules to work with, we took this as an indication that these rules allowed for a broad range of forms, and began using them separately.

Grasshopper and Wasp were used to generate aggregation forms based on these rules. The rules were refined to use the part types for specific purposes, wherein the flat pieces fill in local areas and the angled pieces expand upwards and outwards in various rates.
Test 01
The first experiment was conducted to test the process of the robotic fabrication of the basic modules and identify issues in the details and strategy in the camming process.
Observations
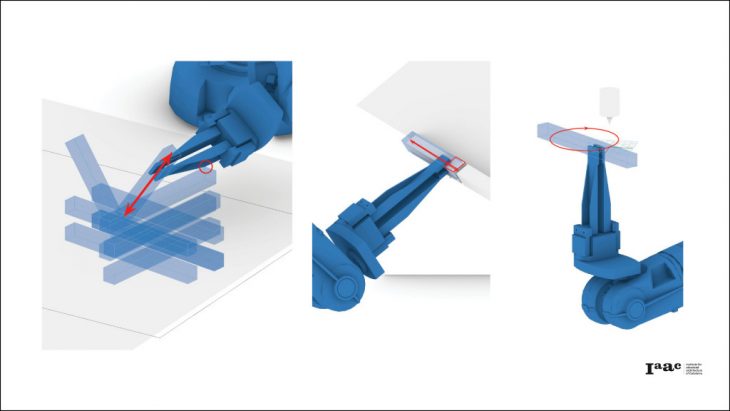
One of the issues we encountered was related to the over-push of the robot on the cantilevered side of the blocks. To overcome this issue, the grabbing point on each stick needs to be adjusted so the force of the robot lands between two supports.
Additionally, the angled elements were shown to require more difficult tool-paths, with the angle of approach being more likely to cause collisions or unreachable positions.
Other areas required hand adjustment of angles and positions to ensure reachable positions. Overcoming this problem cleanly is a challenge, as it would require kinematic math or brute-force checking of positions against the simulation response.

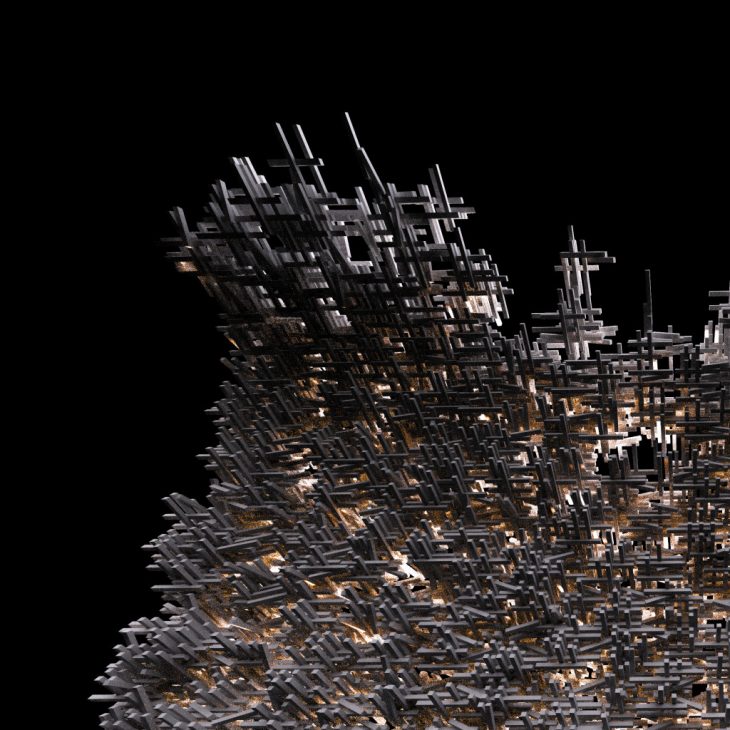
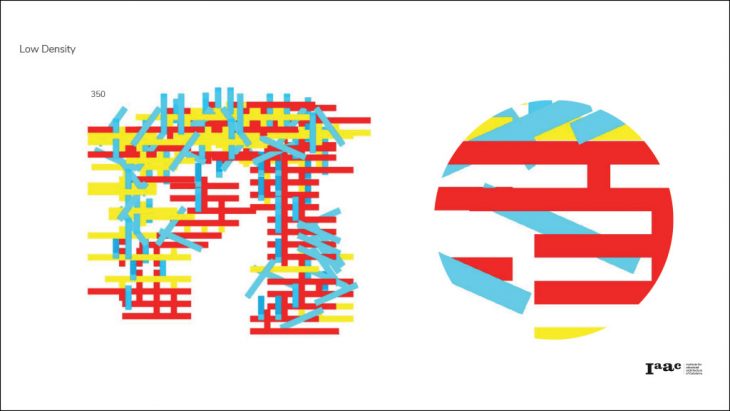
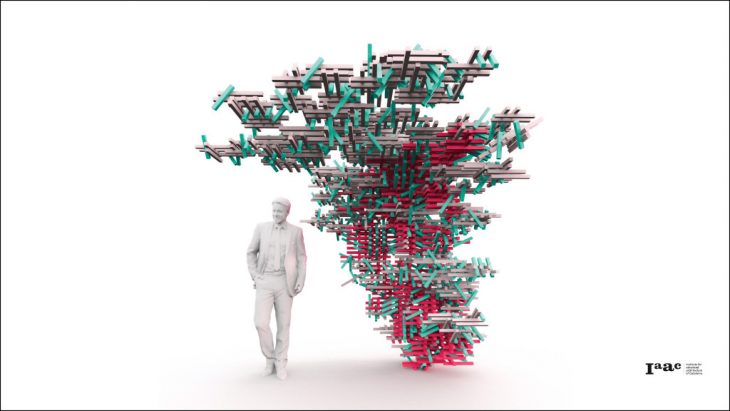
Aggregation
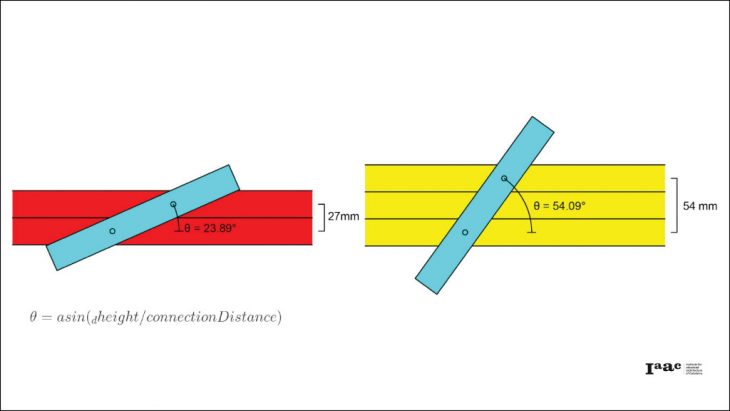
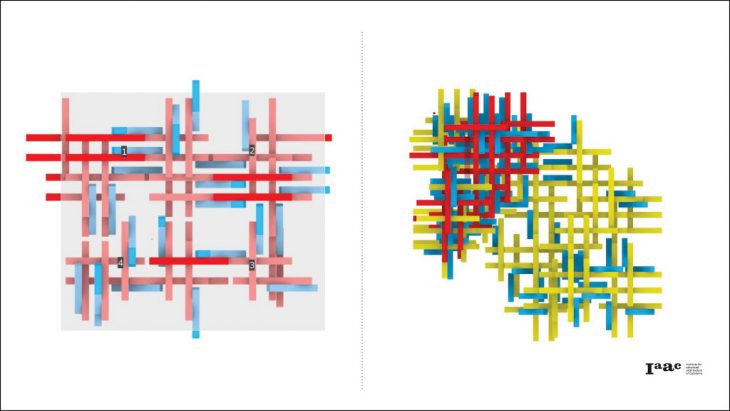
The (A) wood piece was divided into 2 different components where the rotation angle was 24° and 54°. The color red refers to the (A) piece with the 24° angle and the yellow refers to the 54° angle. Different rules of connection between them and the (B) piece give unique emergent patterns as shown in the aggregation videos.

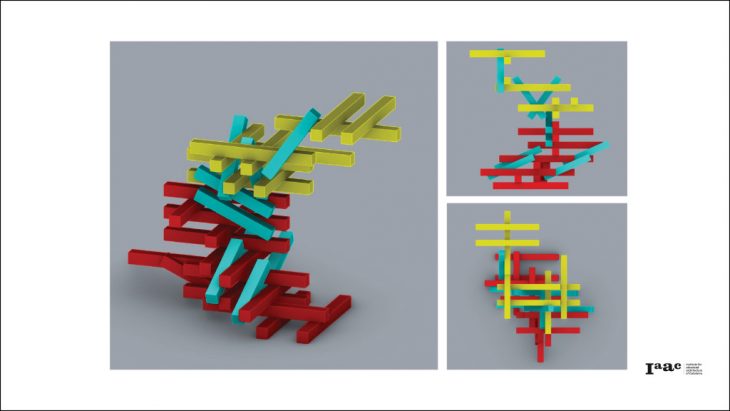
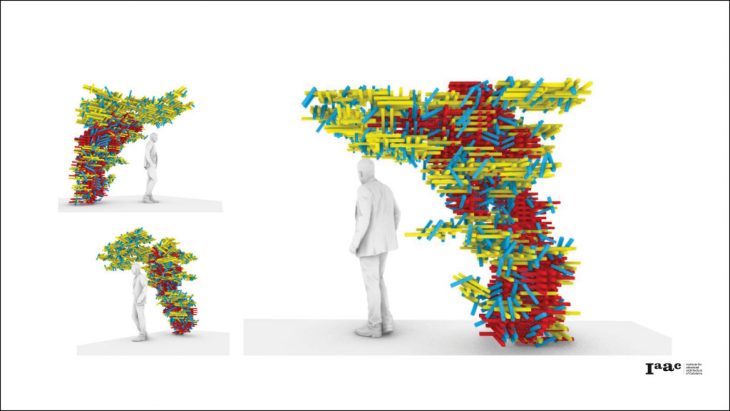
Robotic Fabrication
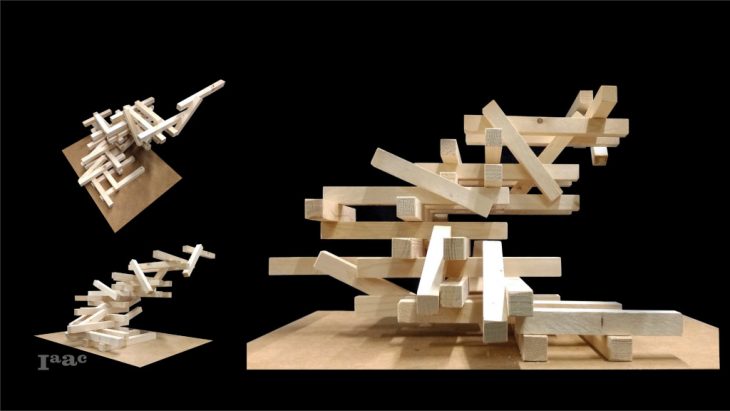
The second assembly was designed to demonstrate these aggregation that we explored digitally. We used grasshopper to simulate the robotic movement. The final model was constructed in two pieces vertically, split at the point where the smaller angles transition to the larger, and even these smaller modules approach the limits of the reach of the robot.
The two parts where combined manually to produce the final assembly.
Craftsmanship Machine Soulfulness is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction in 2019 by:
Students: Matthew Gordon, Luis Jayme, Gjeorgjia Lilo, Roberto Enrique Vargas Calvo
Faculty: Pablo Zamorano, Aldo Sollazzo, Raimund Krenmueller
Faculty Assistants: Soroush Garivani, Hazal Yilmaz