GOAL
The team “CRACKS” was inspired by the crack pattern mosaic which brings an amazingly mesmerizing architectural outcome and can be merged in internal and external architecture such as water features, bathrooms, etc. The main focus of this project was to use waste ceramic tiles and assemble them using the UR-Robotic arm.
SETUP
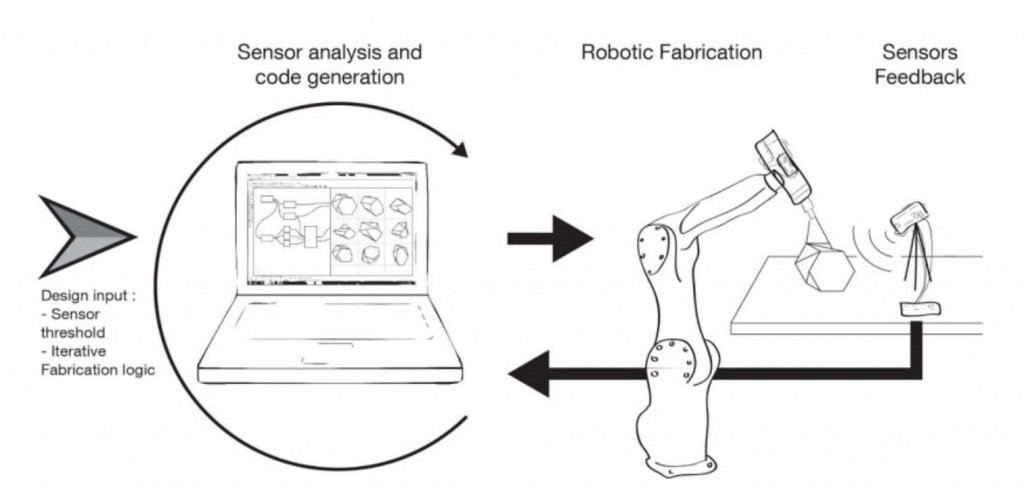
Intel Real sense RGBD camera was used to detect in real-time
which helped the arm to sense the exact tile piece required for execution as per design.
INSPIRATION
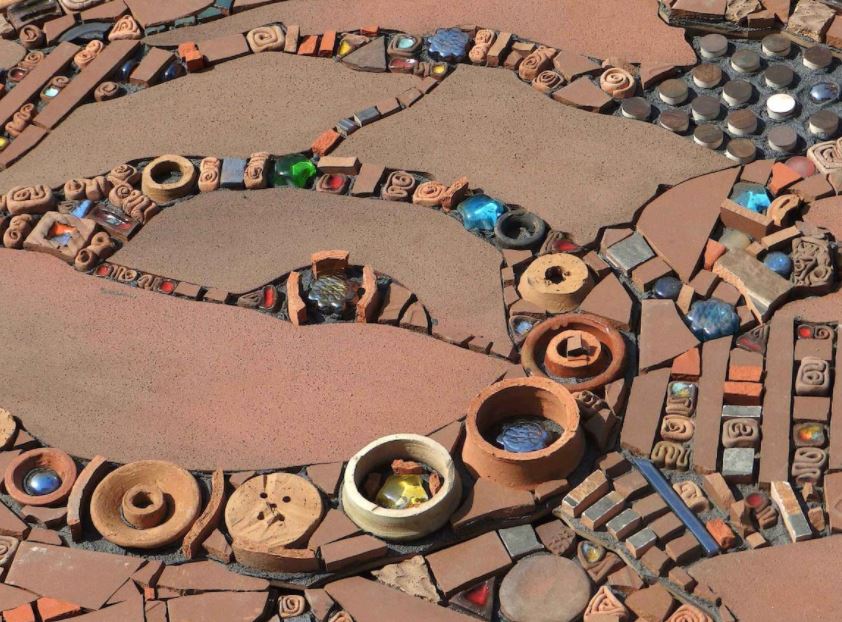
Mohamed Banawy & Khaled Zaki, the Egyptian Pavilion at the Egyptian Pavilion in 2013 Venice Biennale.
DESIGN CONCEPT
Inspired by the above-mentioned, the team designed a 300X300mm prototype as a workshop deliverable, which has the potential of large-scale application. The main intention of the design was to use white glossy bigger tile pieces as the mainframe and to use the small contrast pieces of 3 darker colors (gray, beige, brown) as filler pieces in order to create a “CRACK” pattern.
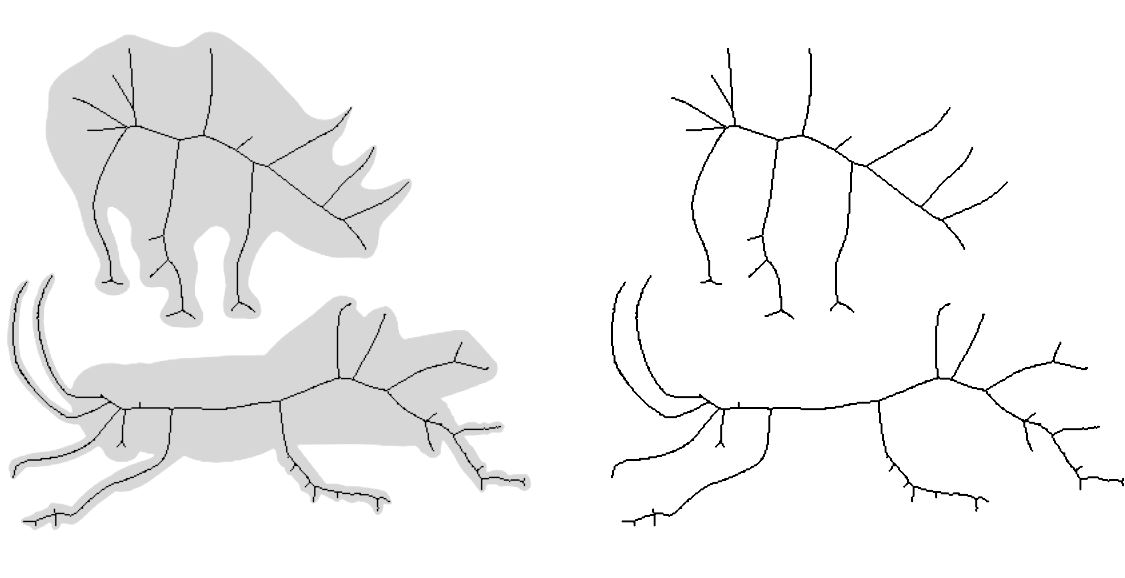
As We used the medial axis approach to achieve the crack pattern
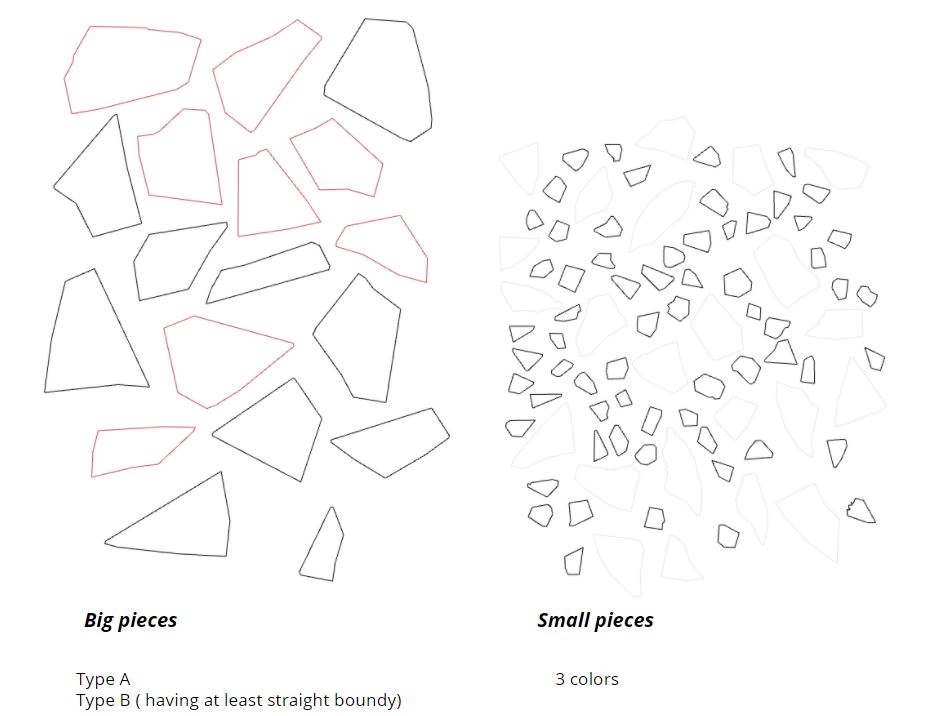
SELECTED DATASET
Based on the design concept, we selected the above tile pieces based on color, required sizes. The next target was to create a contour profile of all the selected tile pieces so that the robotic arm can detect the exact piece during the execution time. For this process we used OpenCV. A clear image of the tileset was used with OpenCV code which converted the RGB image to Grayscale and created contour around the edges of the tileset. The code also helped us to remove unwanted noise from the image. Alongside contour, we also used color, area, length of boundaries as parameters in our algorithm. Further, the contours transferred in grasshopper using ROS.
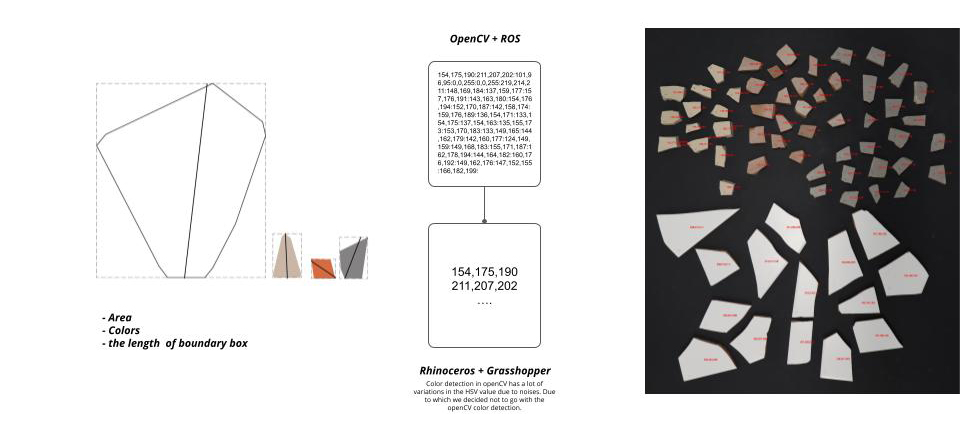

FINAL DATASET// In order to achieve a better outcome,
we decided to select a much bigger piece for the base frame which eventual would create more depth to the crack pattern concept.
DESIGN ALGORITHM
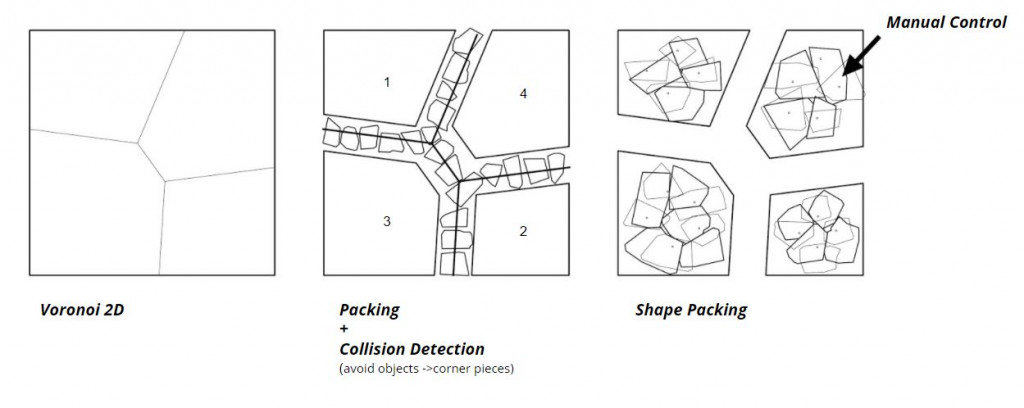
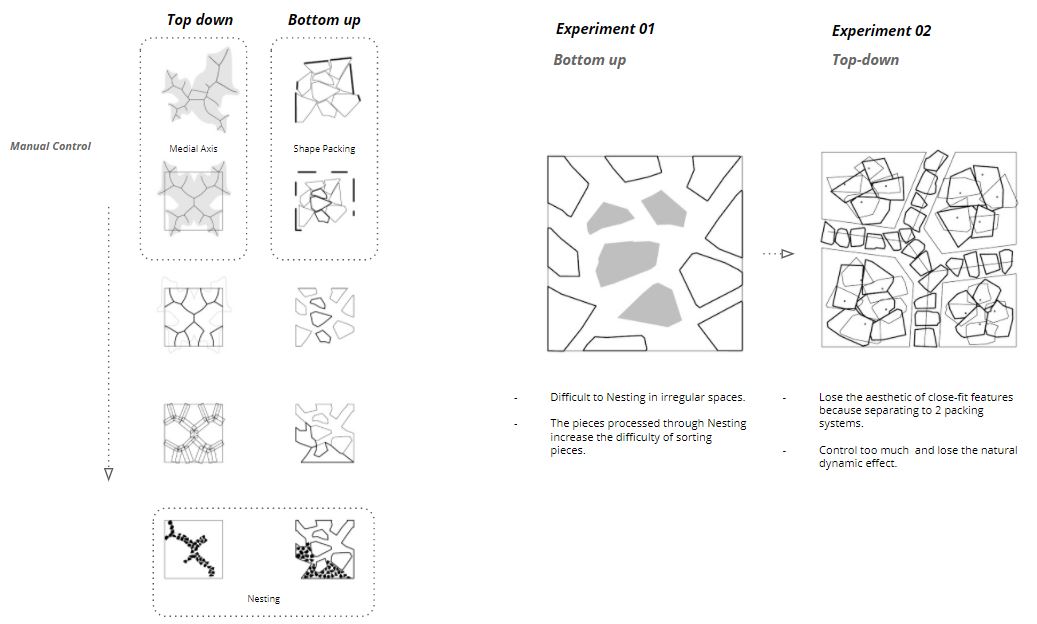
For the algorithm, we used grasshopper along with the kangaroo plugin which helped us to achieve the design outcome.
FABRICATION/FINAL OUTCOME

CRACKS // WS 2.1 is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at
the Master in Robotics and Advanced Construction in 2020/2021 by:
Students:Charng Shin Chen, Arpan Mathe
Faculty: Angel Muñoz, Alexandre Dubor
Faculty Assistant: Soroush Garivani
