COMPUTATIONAL DESIGN FOR ROBOTIC FABRICATION // FRAME/WORK
Frame/work is a 3d space frame that can be built in a simple pick, cut and place process by a six axis robot. The design process involved the exploration of many different base geometries made of wooden sticks, that could then be aggregated into a spatial structure. From each of the modules we learned strategies to increase the stability and fabricability of the overall geometry, which were applied to our final design.
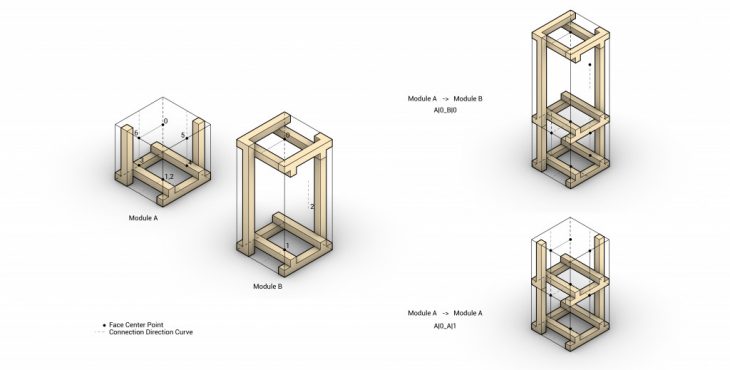
// CATALOGUE
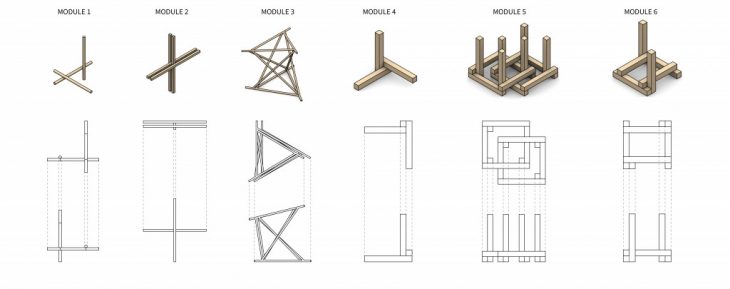
From these explorations we observed that the joineries used in modules 4, 5 and 6 were more stable, since the vertical elements are always held in place by two or more horizontal sticks. The first three modules presented many fabrication difficulties because of the need for extra supports during the placing process, and were also not ideal for the robotic gripper once many modules were aggregated. Our goal after this was having a clear order of assembly divided by layers, avoiding collision, and stabilizing the connection between sticks.
// FINAL MODULE
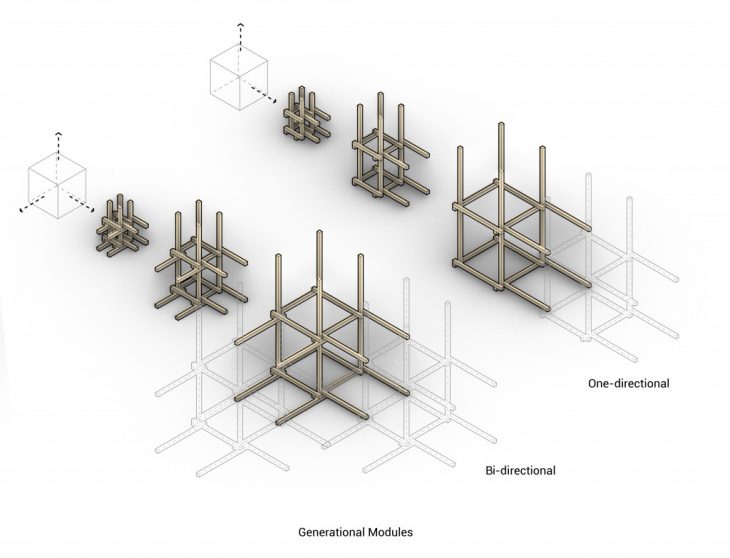
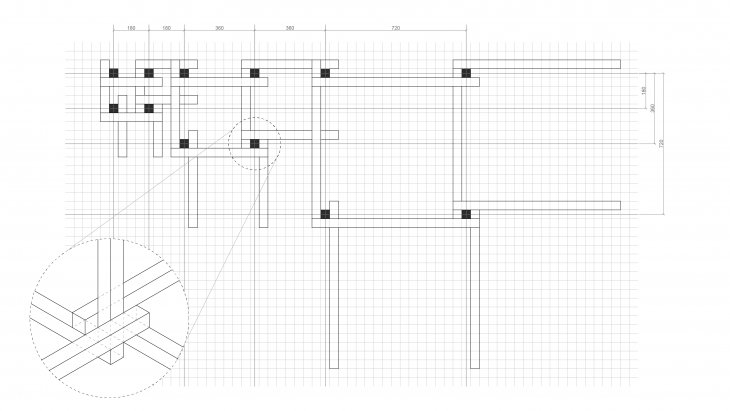
The final geometry can be aggregated in one or two directions. It follows a 180mm grid and has three different module dimensions, resulting in three different types of density once the modules are aggregated.
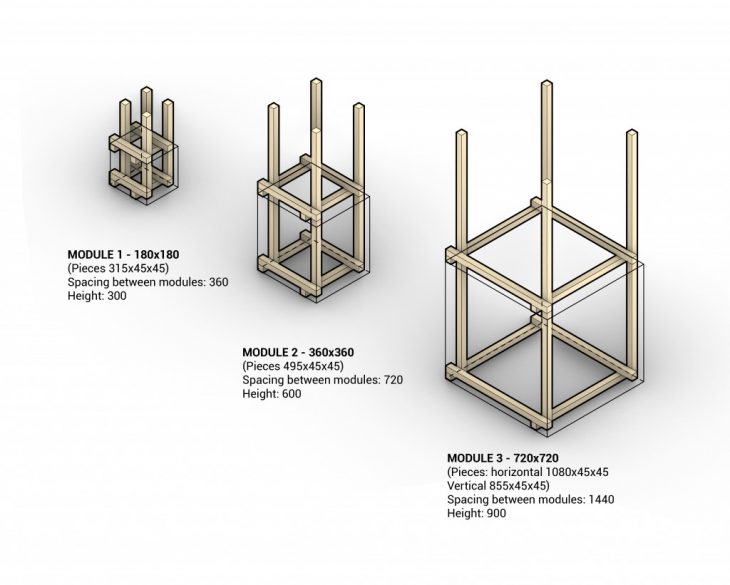
The vertical pieces are held in place by horizontal pieces on four sides.
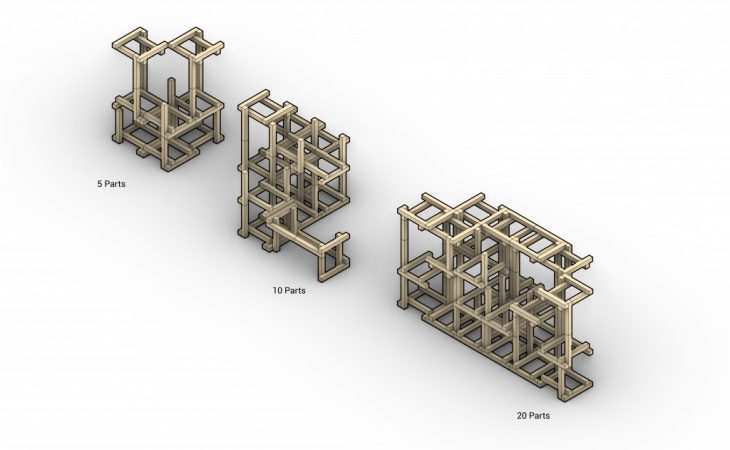
// STOCHASTIC AGGREGATION
We tried a stochastic aggregation of the modules using Wasp and the result was close to our goal, but with some issues in the assembly logic and the support of some of the sticks. This method didn’t offer enough control of the order of assembly and that is essential when working with a pick and place process. This experimentation was further developed and adjusted in order to achieve our final aggregation.
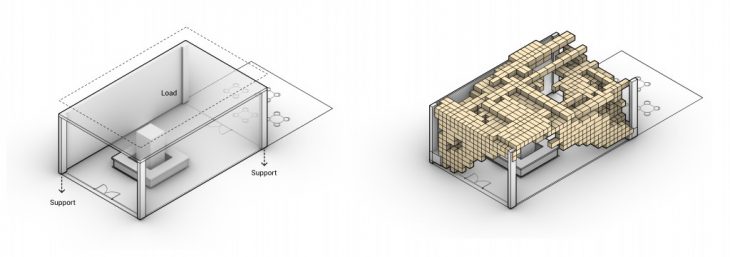
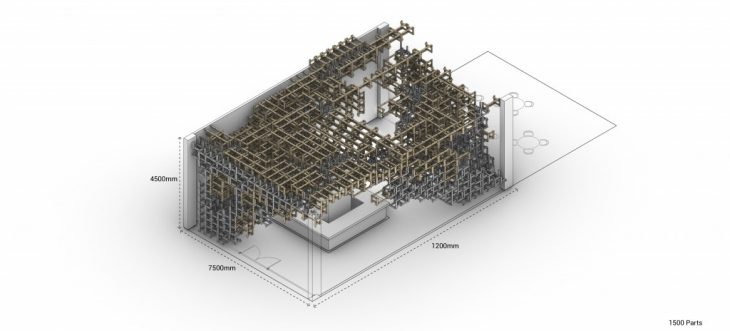
// FINAL AGGREGATION
The three different densities allow some areas of the frame to be very open and others very protected from sun and rain.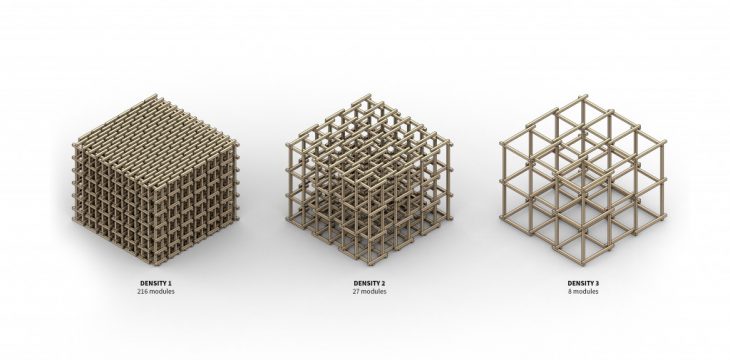
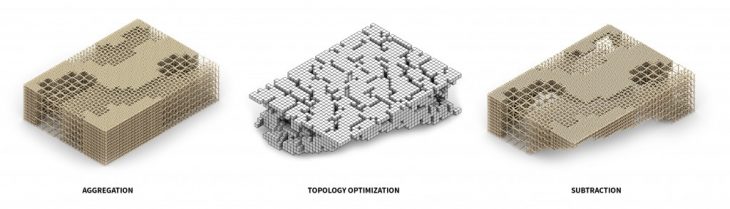
The program chosen was an outdoor coffee shop and restaurant inserted in a park in an urban context for 55 people. The spatial frame was obtained by aggregation and subtraction. First, we filled the whole floor plan with the modules, respecting the areas that need more protection and the ones that need less. Then, we ran a topology optimization in order to be able to subtract part of the volume and have a stable structure as a result.
// ASSEMBLY LOGIC
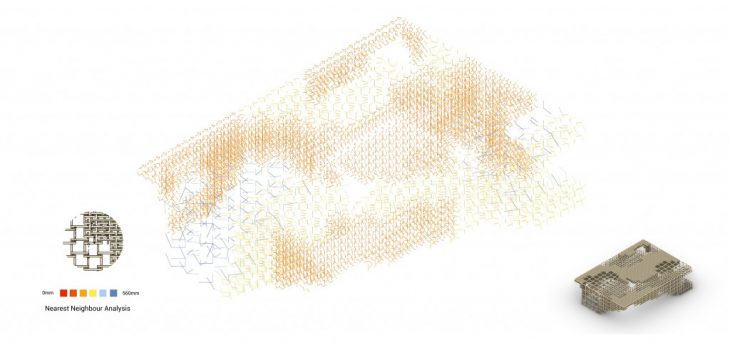
// ANALYSIS
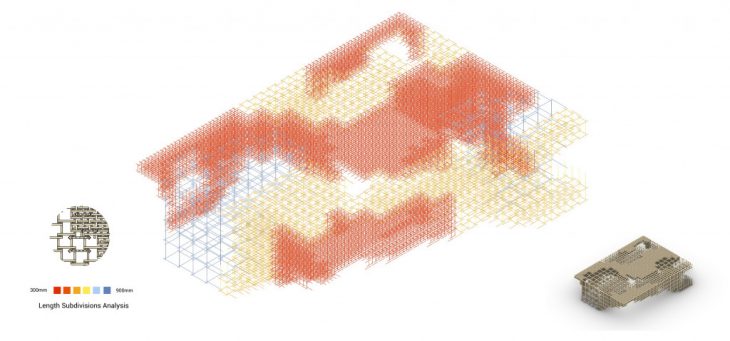
The analysis was done to both verify if there were any collisions throughout the volume and to sort the different lenghts of the wooden sticks.
// ROBOTIC SETUP
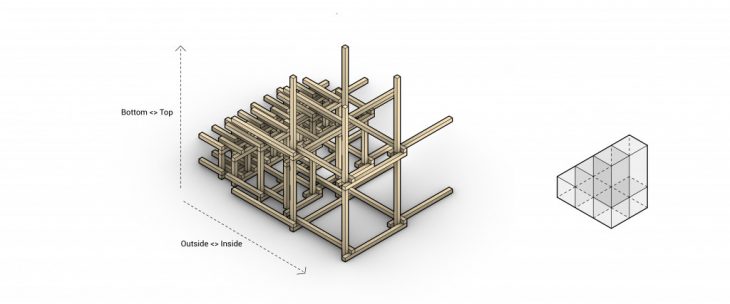
The robotic setup consists in a pickup table where the sticks of different lengths are placed in the right order, a gluing table and the work bed. The layers should be numbered and organized to make sure that every stick placed has at least two points of support. The vertical sticks are then always placed in between four horizontal sticks. The robot will have different approach angles according to the position in which the stick will be placed and where the glue should be applied.

// RENDER

// VIDEO
</p>
Frame/work is a project of IAAC, Institute for Advanced Architecture of Catalonia developed Master in Advanced Architecture in 2019/2020 by:
Students: Brenda Freitas, Abhishek Sharma
Faculty: Alexandre Dubor, Ricardo Mayor