ABSTRACT
With digital modelling tools like Rhinoceros 3d and parametric tools like Grasshopper,
we can design and manipulate the geometry of a structure to get variable designs which we relate
to optical desires, relevant structures for the fabrication process and other needs. We transform the
flexibility inside the digital interface to a solid nonchangeable physical modell .
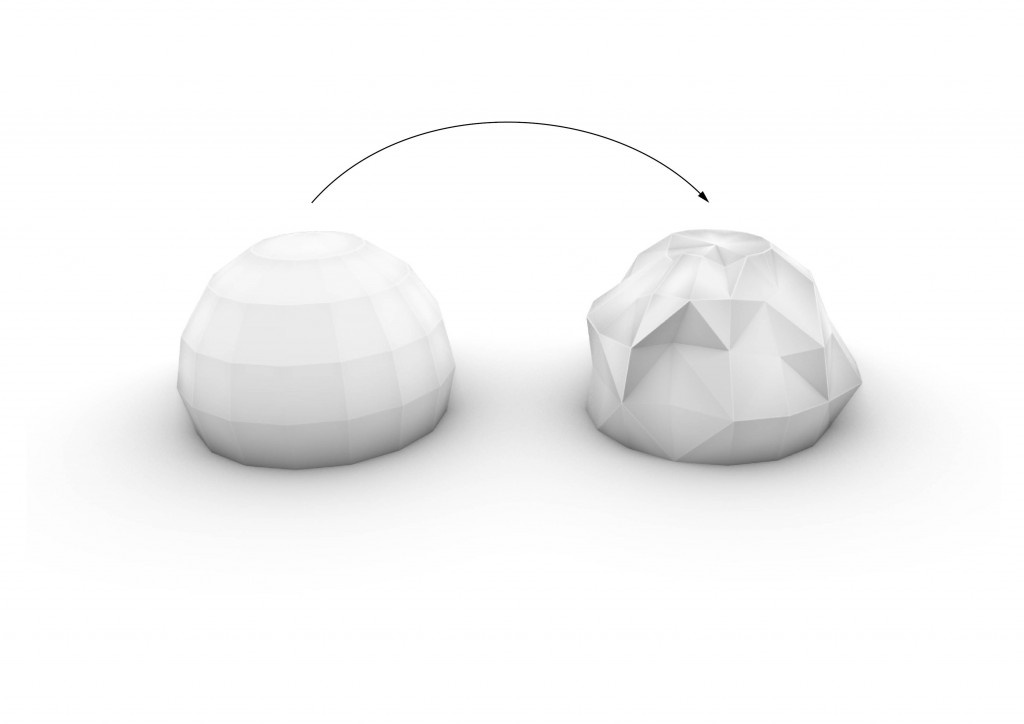
What if we can simulate the physical behavior of the final fabricated structure inside the digital
world of Rhinoceros and Grasshopper ? If we could add force and tension to the digital modell by
keeping the dimensions of the structure elements, we are able to simulate how our final physical
structure could be deformed, if the connection between the elements is flexible enough.
KEYWORDS Flexible Connection • Physical Structure Manipulation • Digital Physics • Origami

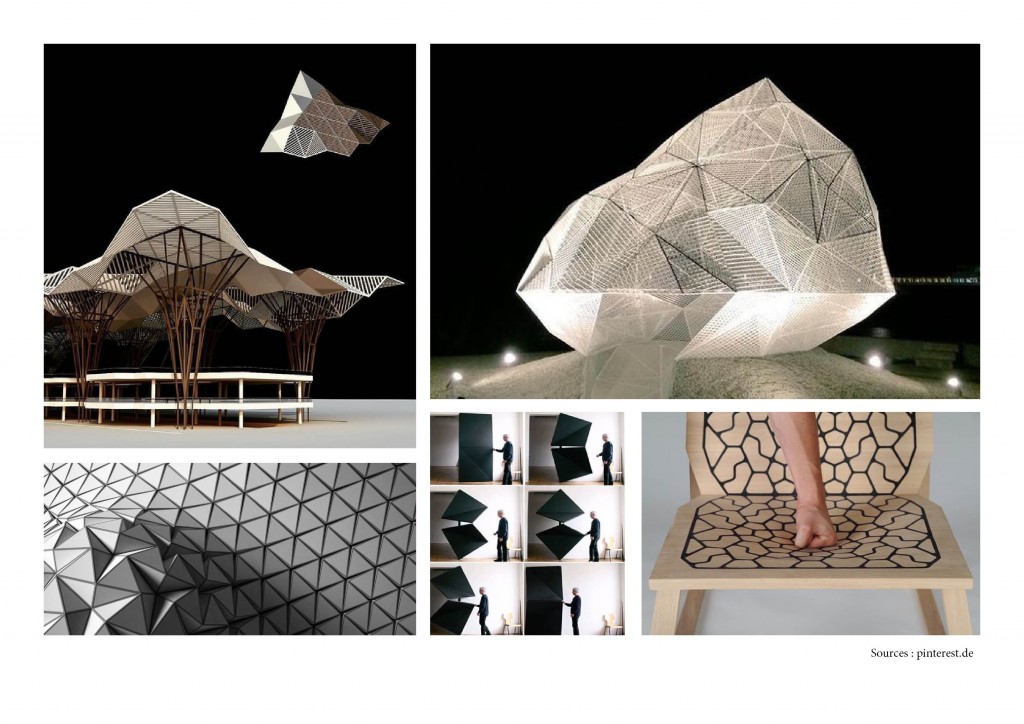
PHYSICAL RFERENCES
IDEA
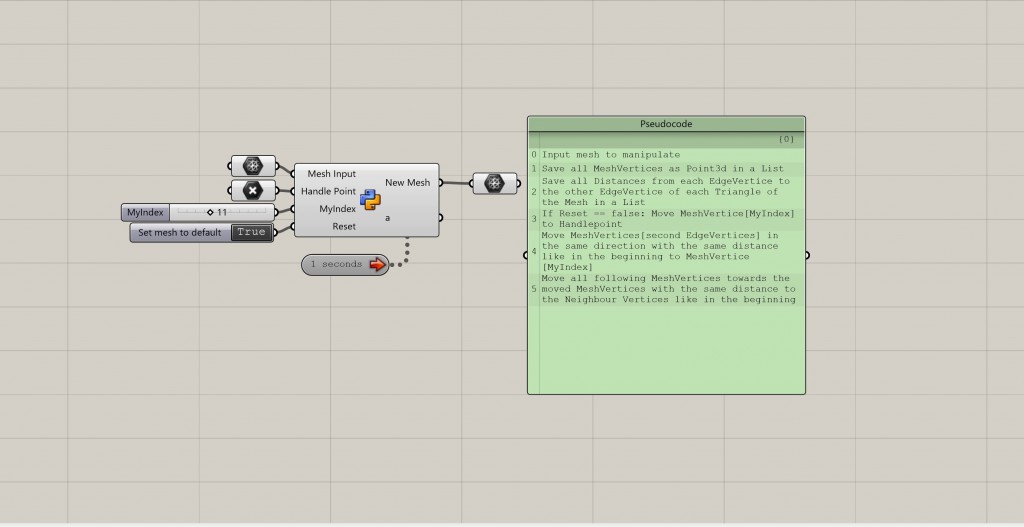
PSEUDOCODE
CONCLUSION
The script is still not working finally but the first steps are visibly in the abstraction of a snake-like line, moving always with the same distance between the points.