BLOOMING CANOPIES
Using Python in Grasshopper to design Kinetic Architecture
ABSTRACT
The intent of the studio was to demonstrate the capabilities of Python as a programming language in architectural design. Python has been demonstrated to be a versatile programming language used to program various software programs. The immense versatility of the language has allowed it to be used as the go-to language for not only web based softwares and apps but also in the field of design. The language is compatible with Rhino and Grasshopper and features as a plugin in both.
As an attempt to learn and explore python, I looked at the possibilty of the python being used in the application of kinetic architecture.
OBJECTIVE
Use biomimetic geometric principles to define a sequence of kinetic canopies that senses and reacts to the presence of an observer / user

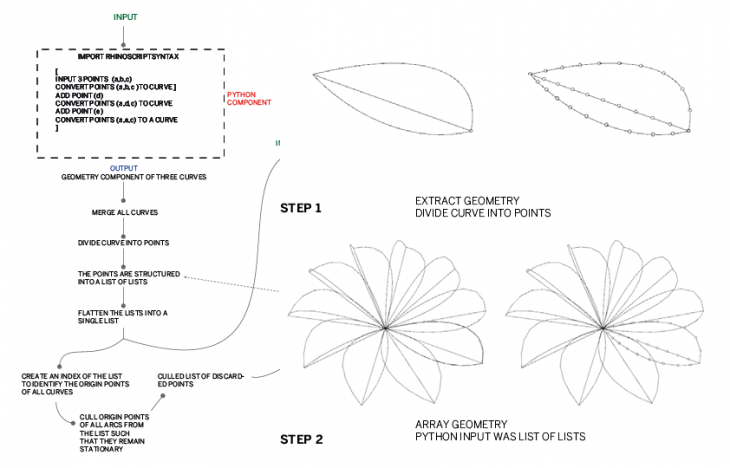
PROCESS
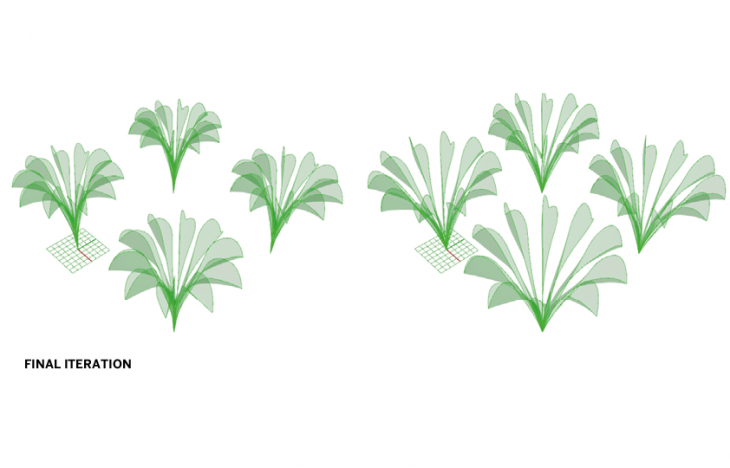
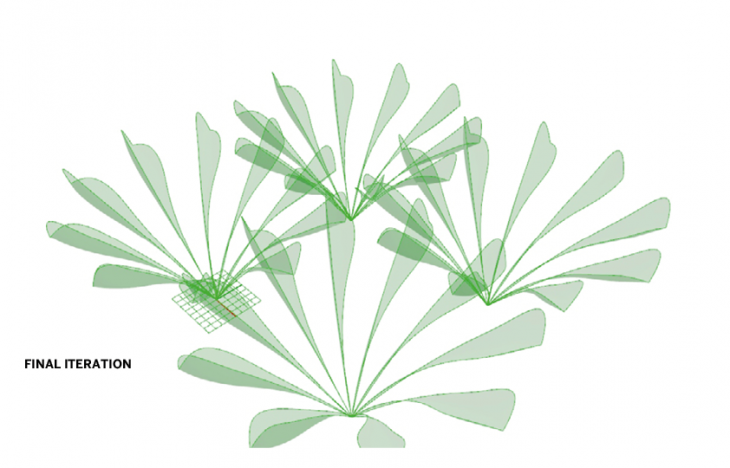
The process started with the initial step of creating a surface geometry with radial symmetry. the geometry was built up from a single point moving into curves and into a final surface. At each step, more points were generated and all these points were stored in a list. Each component of the geometry or ‘petal’ acts as a list of points and the final geometry or ‘flower’ becomes a list of list of points.
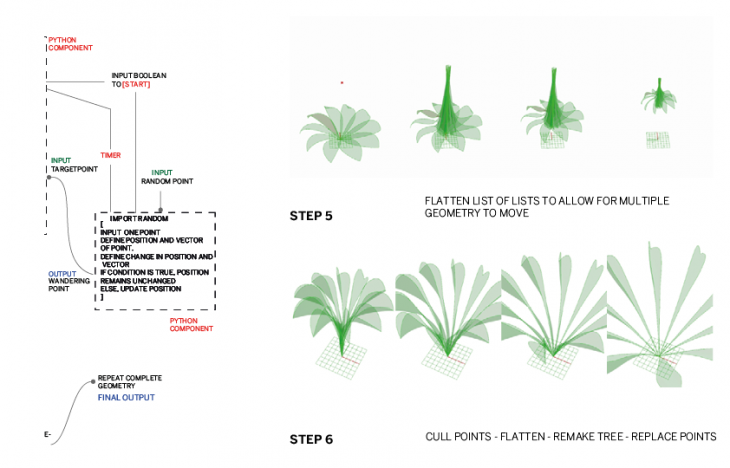
Once the geometry is generated, the next step was to move them towards a stationary point in space. This part of the code was written in python. As the data input of the complete geometry was a list of lists, it created some issues in the ability of the ‘for’ loop to run through all the points effectively. Therefore the lists were simplified into a simple list and run through python. once run, it was then restructured back to its original data tree.
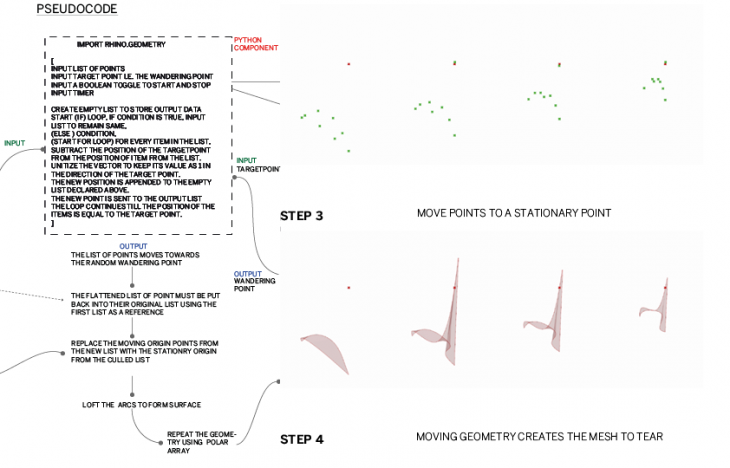
Replacing the stationary point with a random attractor point i.e. the user that affects the motion of the geometry. Lastly the attractor point is set off by a start command that sets off the whole motion.
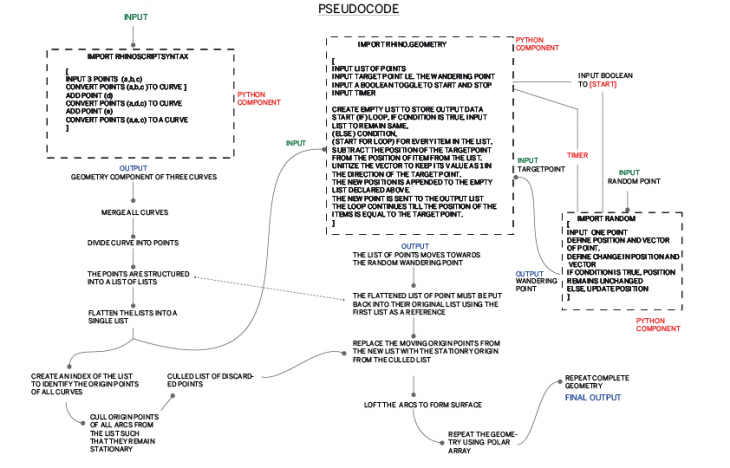
FINAL PSEUDOCODE
TEST
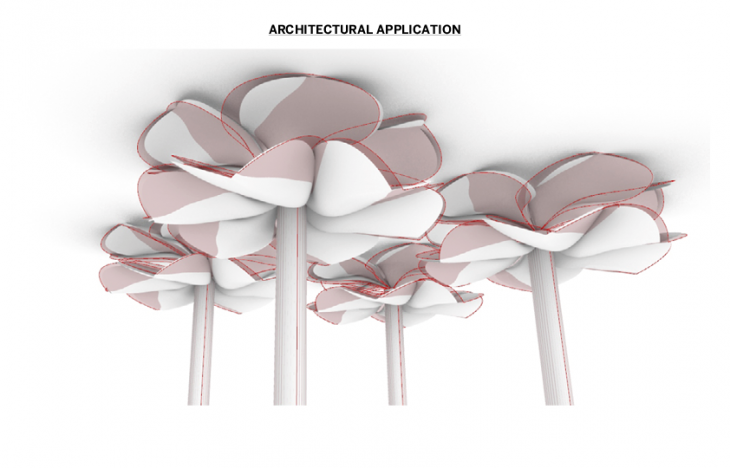
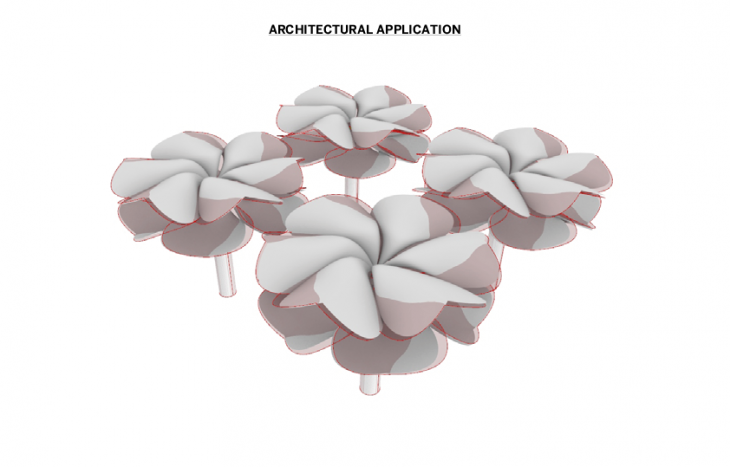
ARCHITECTURAL APPLICATION
The architectural application is envisioned as an interactive canopy or an installation where the movement of the user in the space affects the motion of the canopy.
CONCLUSION AND FURTHER APPLICATION:
The next steps of this project will be to introduce multiple attractor points and establish a proximity range for the wandering point. Beyond the range the geometry will trace its path path to its original position unless acted upon by a different attractor point
Blooming Canopies is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction (M.R.A.C.) in 2018 by,
Students: Sujay Kumarji
Guest Lecturer : Long Nguyen
MRAC Faculty: Eugenio Bettucchi