 Adding a craftsmanship to the robot needs precise learning, prototyping and calculations.
Adding a craftsmanship to the robot needs precise learning, prototyping and calculations.
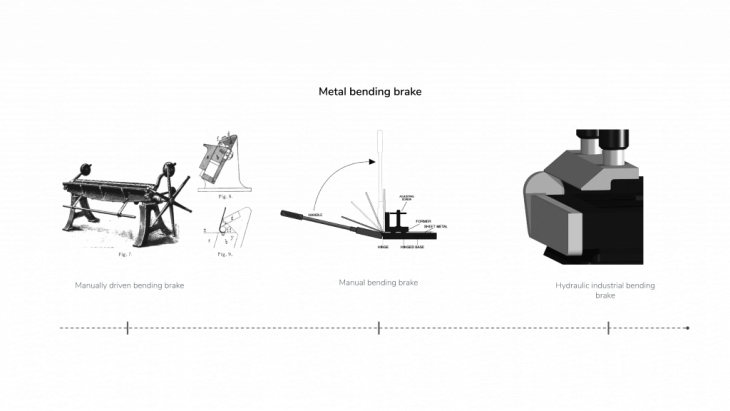
By studying the present tools we were able to learn and apply techniques for bending metal sheets.
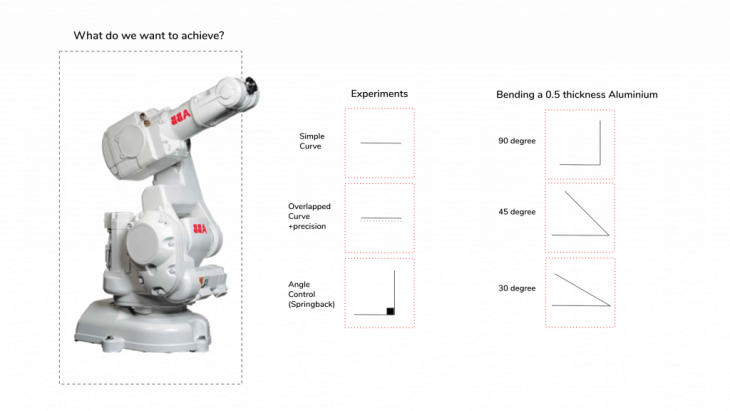
And then we set up some goals to be achieved with the new tool we are going to build.
And as a very early start, we built a prototype to grip and bend.
However, we found imperfection in controlling the crease position and the angle of bending.

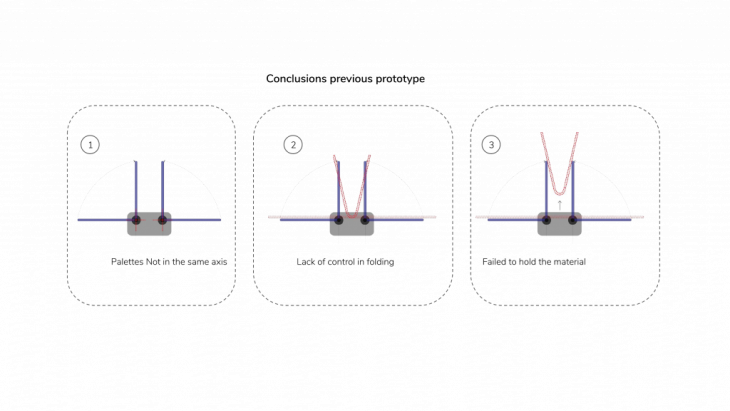
Therefore, New design and strategy was made to achieve the wanted target from the tool.
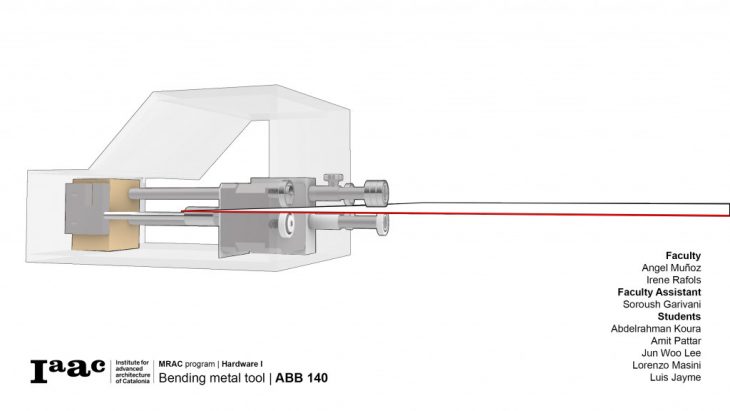
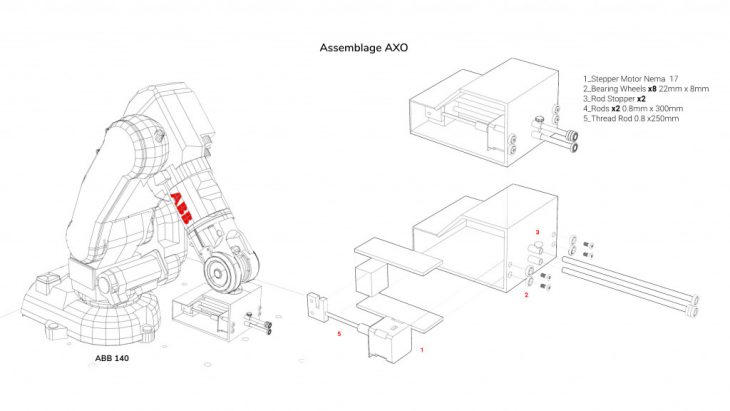
The Metal Sheet Bender
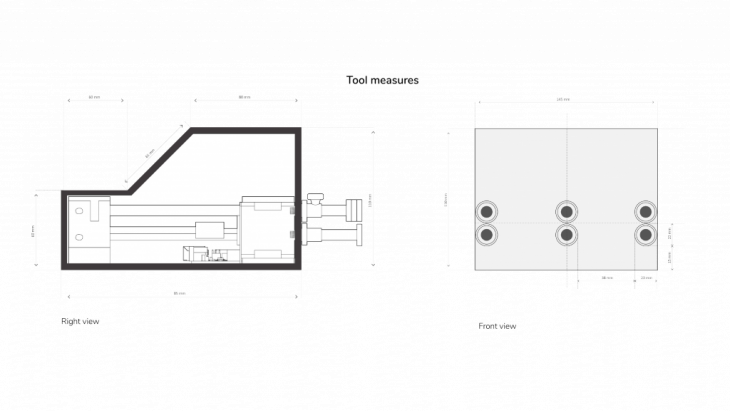
Tool measurements
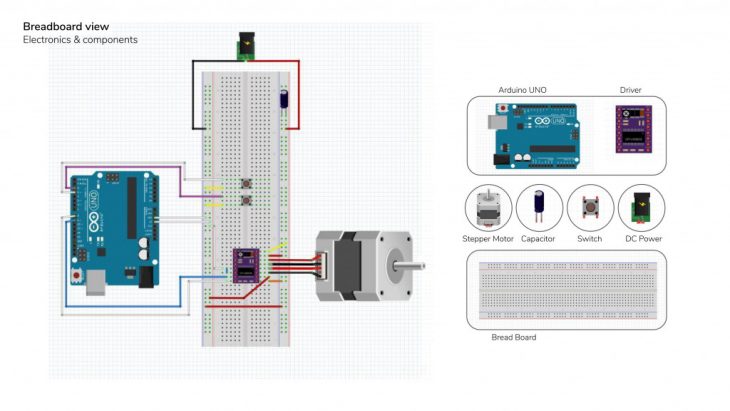
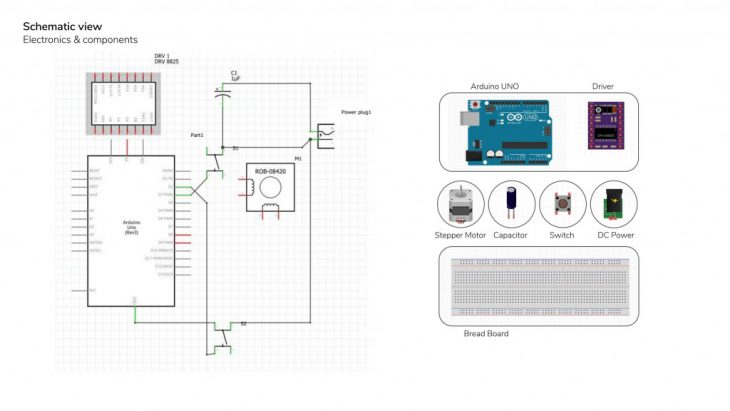
Arduino Uno Circuit
Stepper Motor Experimenting
</p>
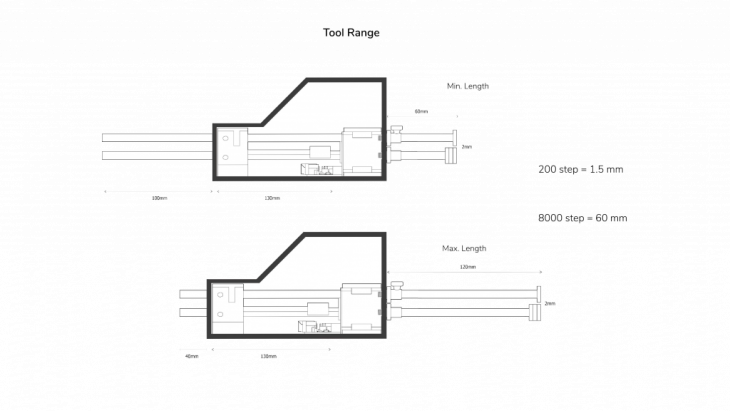
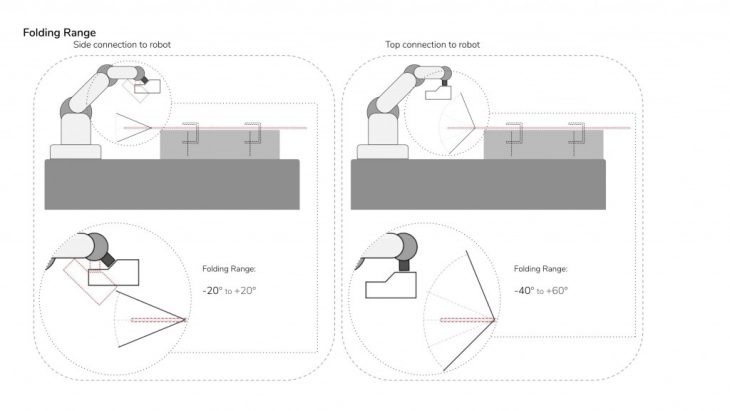
Folding Range and Robot Simulation
</p>
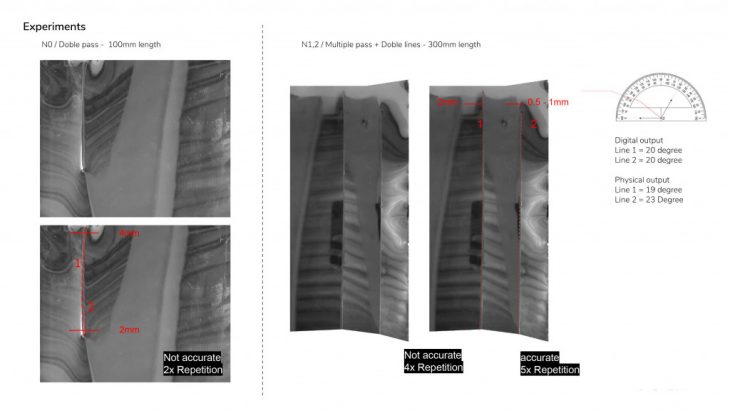
Experiments
</p>
Cons: 1.Length adjustment. 2.Simulation angle control.
</p>
</p>
Cons: Aluminium sheet Length adjustment.
Experiments results and analysis
A Change in the robot path so it can follow the sheet edge.
Experiments results and analysis (after changing robot path)
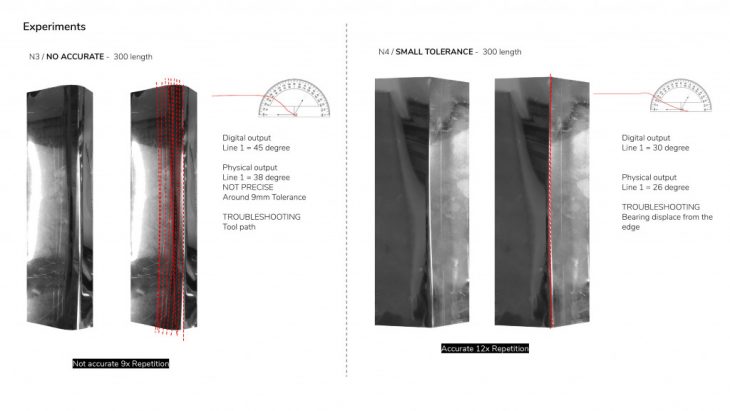
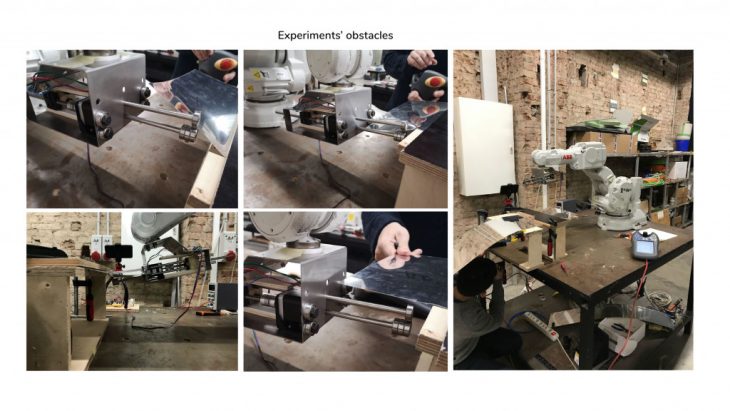
Experiments’ Obstacles
Future possible applications

Bending metal tool | ABB 140 is a project of IaaC, Institute for Advanced Architecture of Catalonia developed in the Masters of Robotics and Advanced Construction in 2019/20 by: Students: Abdelrahman Koura, Amit Pattar, Jun woo Lee, Lorenzo Masini and Luis Jayme Buerba Faculty: Angel Munoz, Soroush Garivani