Automated assistance in construction sites 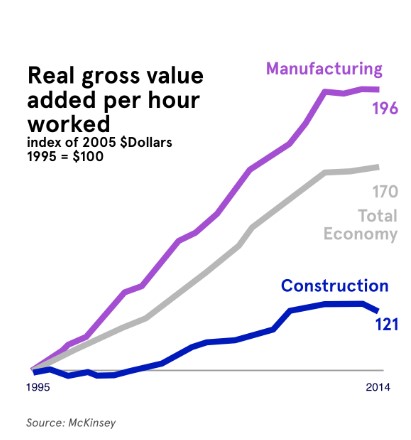
Productivity in construction is lower than other industries
The construction industry has suffered from an immense productivity challenge for the last three decades That’s because construction sites are complex environments that require more than just management and software tools for productivity gains, which is what also makes them huge opportunities for hardware startups in the years ahead.
Material management
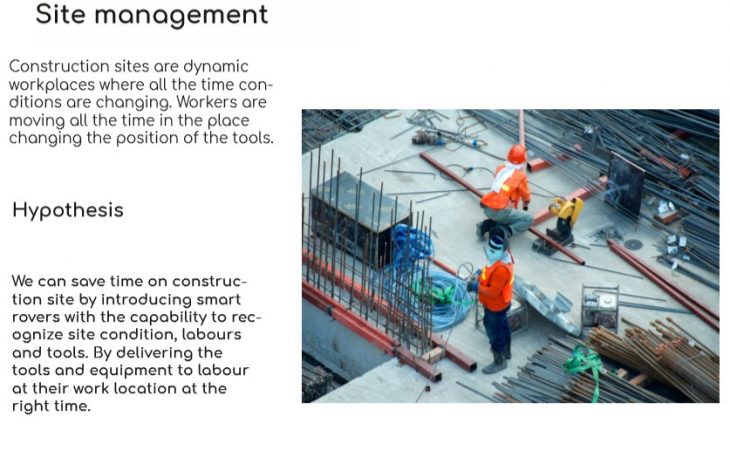 What happens if rovers can solve the problem of tracking and deliver goods in construction sites saving time and money?
What happens if rovers can solve the problem of tracking and deliver goods in construction sites saving time and money?
 Why rovers?
Why rovers?
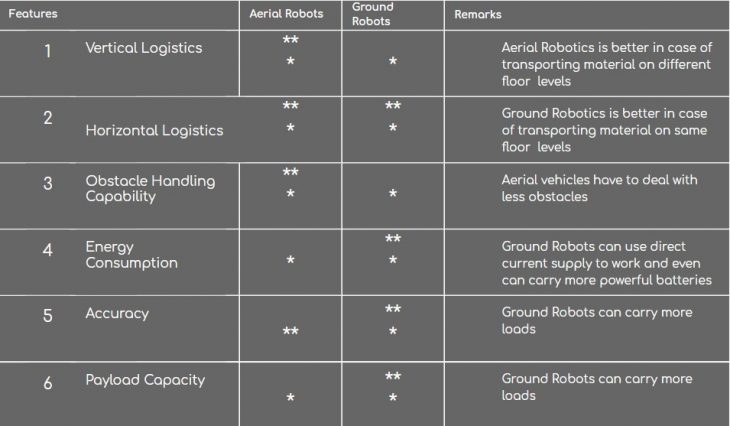
More accurate, more payload and better energy consumption performance
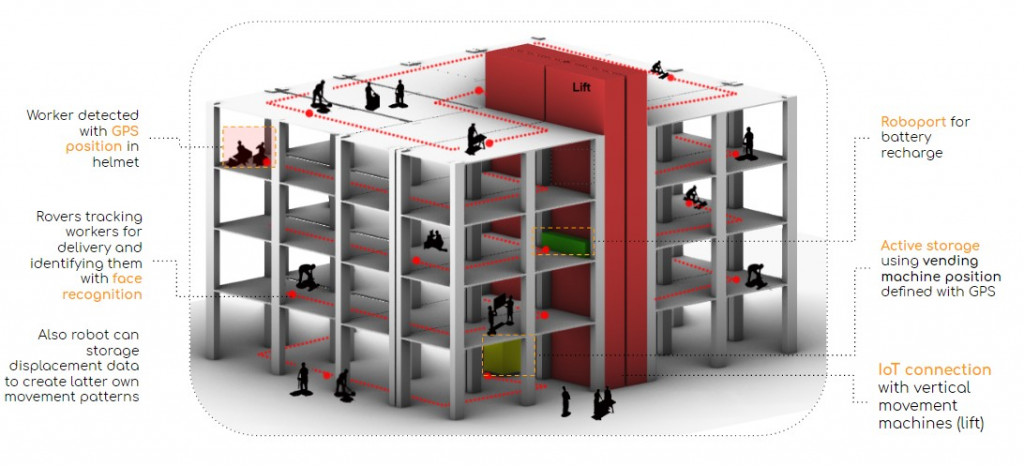
High rise building
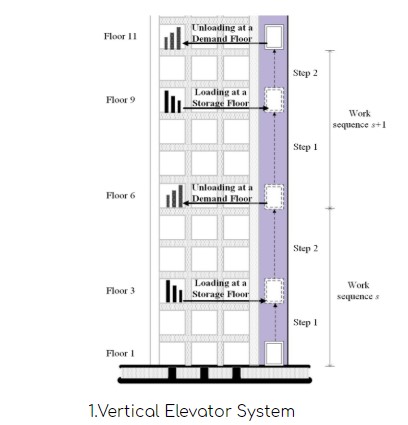

In construction sites is possible to find two different systems to deploy materials and connect different levels in high rise buildings. We are focusing our project on lift connection with storage in key floors.
Service structure
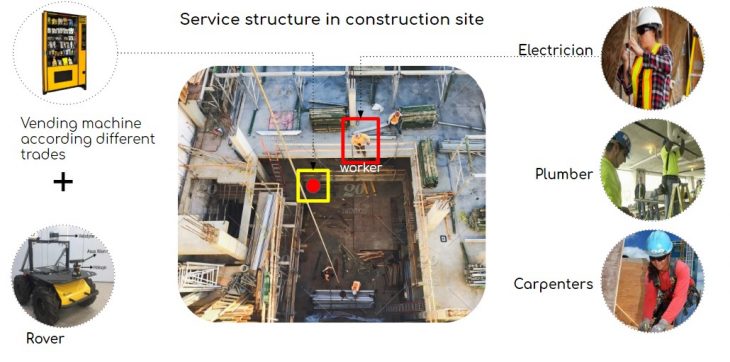
Idea is to connect tools and materials using rovers. Vending machines provides materials and tools according with every trade, using as a reference the most common elements they need during the work.

Using a mobile app workers can ask to rover materials they need, rover connect with vending machine carring the tool. At the end of the path, rover find the worker using navigation and gps. When reach the point, release the tool using face recognition as a security layer.
Market survey
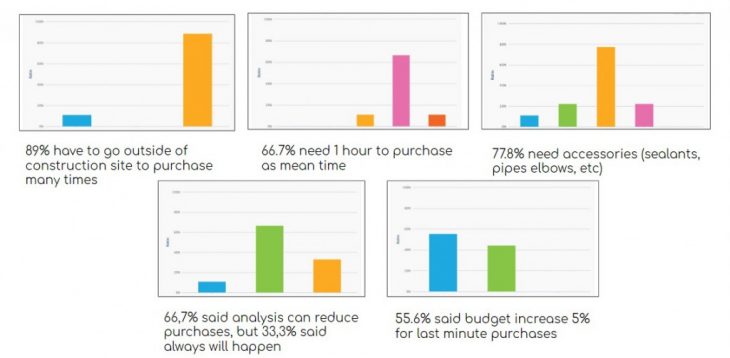
Asking to potential users in the market, they answer that last time purchases increases their budgets, they also needs 1 hour or more to go outside to purchase. It happens very often during the time lapse of the construction site.
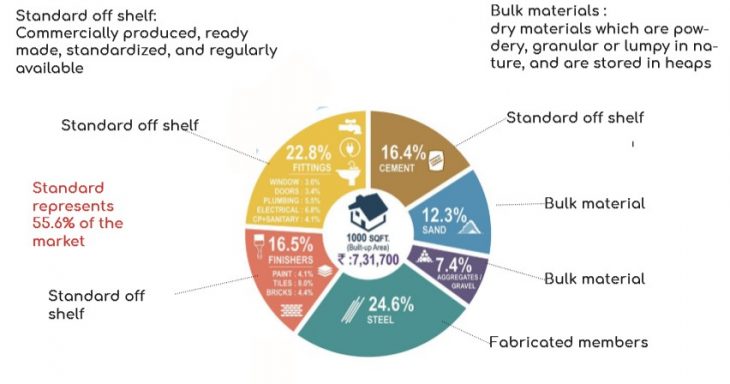
Market analysis

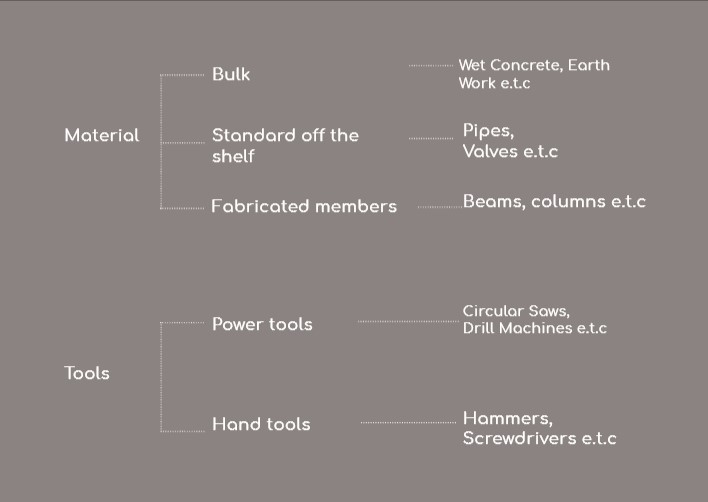
Structure analysis
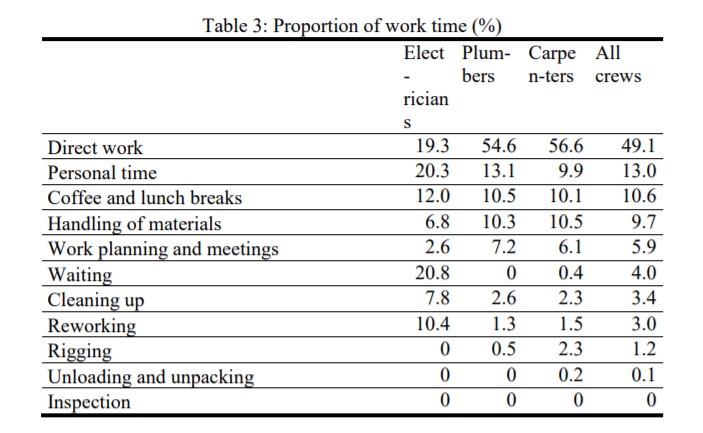
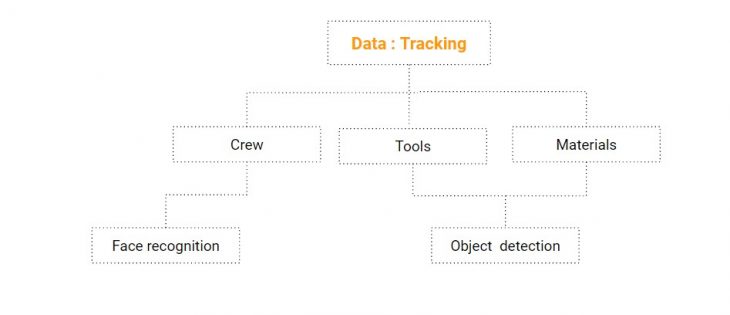
To analyze work patterns in construction site, we divided it in two areas 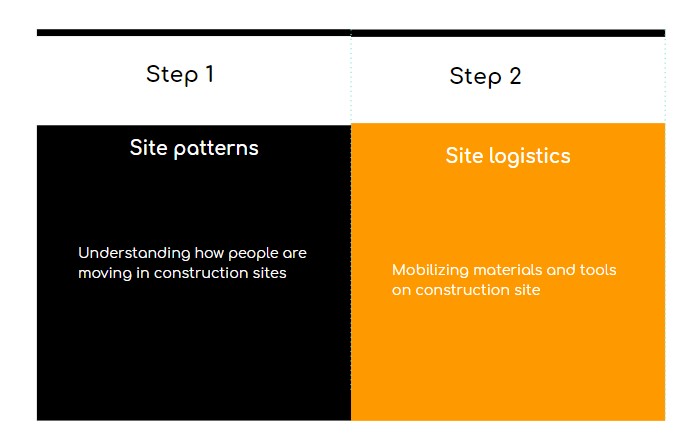 According to site logistics we can track crew, tools and materials
According to site logistics we can track crew, tools and materials
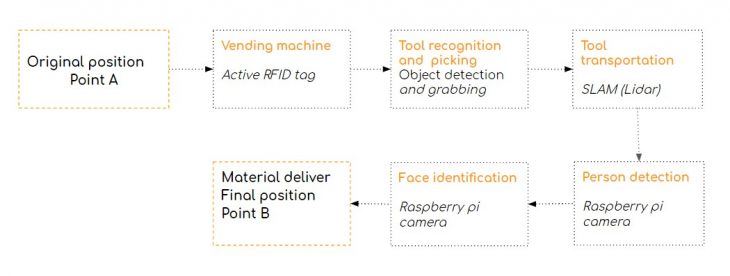
 Flow chart showing robotic path from point A (tool) to point B (worker)
Flow chart showing robotic path from point A (tool) to point B (worker)
 Focusing on navigation we can find two types
Focusing on navigation we can find two types
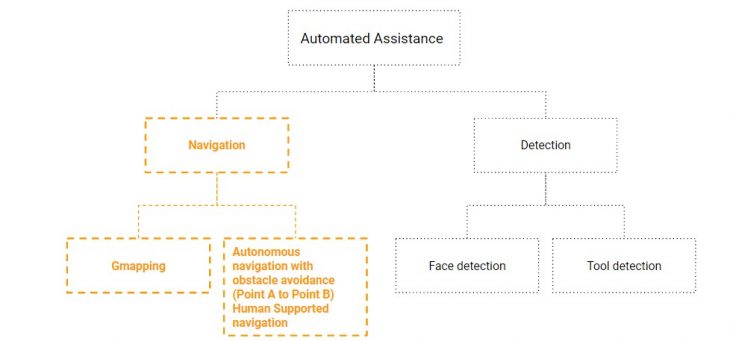
Navigation
To run a navigation demo, we mounted a system with Turtlebot 2 robot, Astra Camera, ROS under Arduino 16 and RVIZ to visualize maps

Demo 1 – Autonomous Navigation
Using system proposed , robot did an autonomous path from point A to point B using navigation packages in ROS
Robot: Kobuki Turtlebot 2| Location: IAAC | Controller: Auto| Camera: Orbbec Astra|Platform: ROS Kinetic |Connection: Laptop – Kobuki
Demo 2: Autonomous navigation with obstacle avoidance
 Robot: Kobuki Turtlebot 2 |Location: IAAC Controller: Human |Camera: Orbbec Astra |Platform: ROS Kinetic|Connection: Laptop – Kobuki| Obstacle: Human
Robot: Kobuki Turtlebot 2 |Location: IAAC Controller: Human |Camera: Orbbec Astra |Platform: ROS Kinetic|Connection: Laptop – Kobuki| Obstacle: Human
Demo 3 – Labour Following navigation
Robot: Kobuki Turtlebot 2 | Location: IAAC | Controller: Human | Camera: Orbbec Astra | Platform: ROS Kinetic | Connection: Laptop – Kobuki | Obstacle: Human
Demo 4 – Labour Following Navigation (Carrying Plier)
Robot: Kobuki Turtlebot 2 |Location: IAAC |Controller: Human| Camera: Orbbec Astra | Platform: ROS Kinetic | Connection: Laptop – Kobuki |Obstacle: Human
Detection
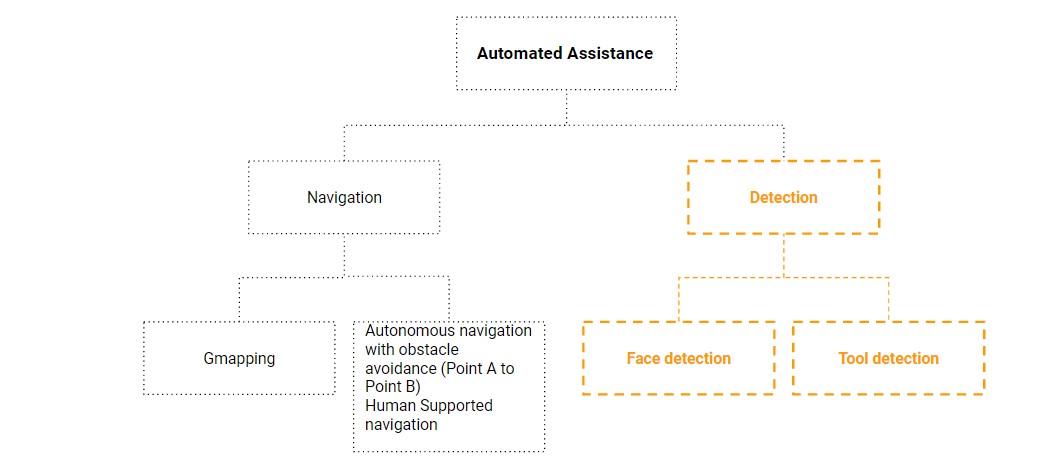
Face recognition
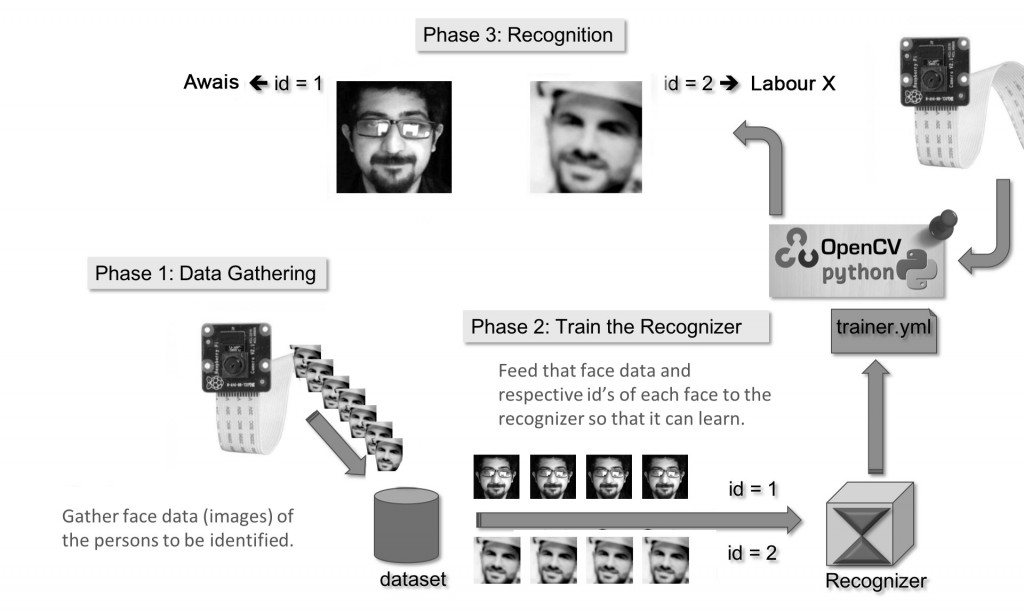
Face recognition demo
Using face recognition to activate hardware gripper using raspberry pi and raspberry camera
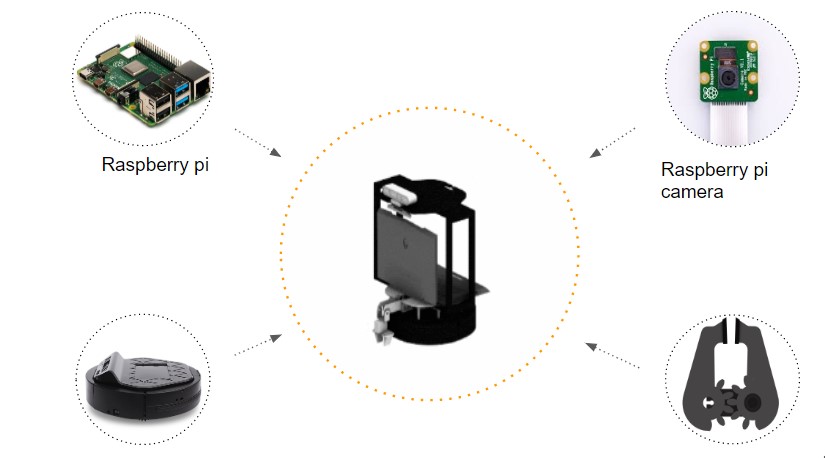
System setup
Future exploration
Tool detection
 Dataset construction for handtools
Dataset construction for handtools
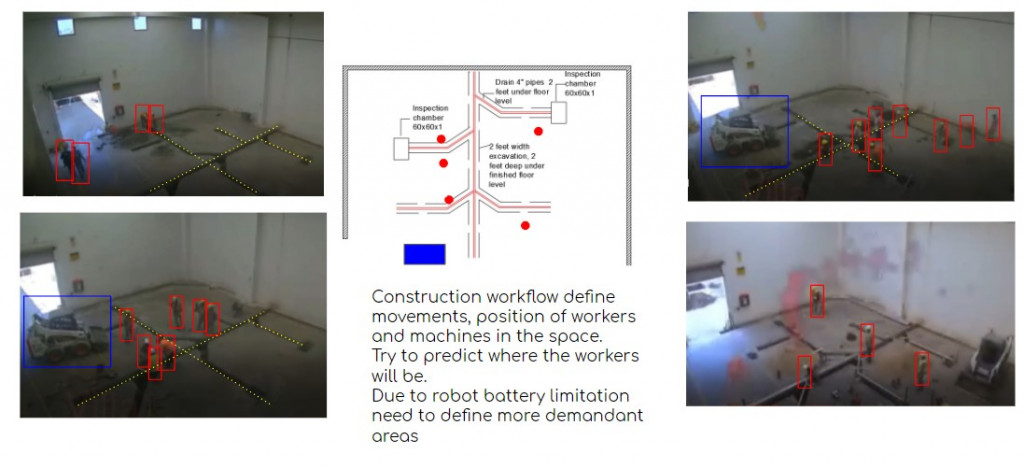
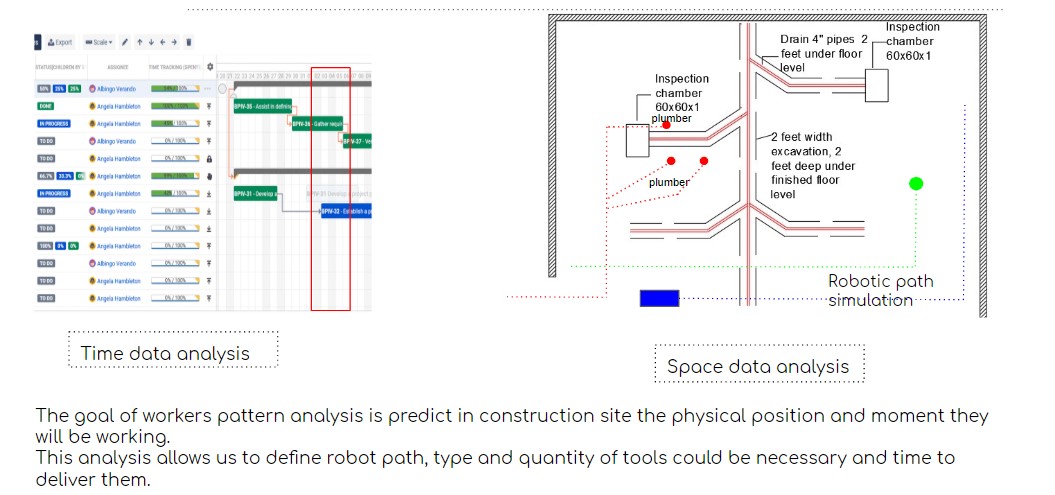
Workers pattern analysis
Final idea