
Brief
The task for Assignment 2 of S0.3 Computational Design Seminar was to deconstruct the design logic and form finding process of a pavilion, and visualise this logic by manipulating the animation tools of Grasshopper. The animation should combine different parameter slider animations and different camera movements.
Pseudo_Code
1 – As starting point for the develpemnt of our project we are going to import the top plant as blueprint of Rope Pavilion where
main structure as well boundaries and constraints are visible.
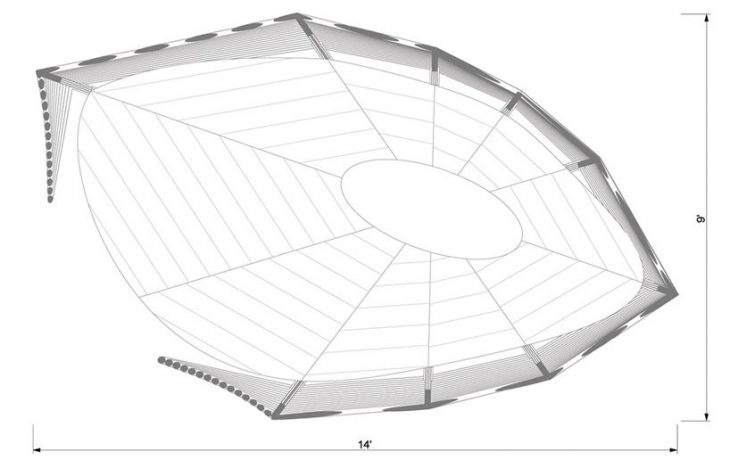
2 – Using uv´s parameters evaluating the surface we have imported in Point.1 we are going to have approximately center point of
the ellipse.
3 – Modifying both radius of the ellipse as well of the main axis by rotation we will have the closer ellipse possible to work on the project
4 – Subdividing the ellipse we work in Point.3 we will have the wireframe structure in ground floor (2D) of the skin_pavilion
5 – Before next step we need to calculate the vectors from the center of the ellipse to the points on the ellipse we found in Point.4
6 – Rotating vertical z plane having the center of the ellipse we will have the main planes to start constructing in 2D our pavilion
7 – Using planes we found in Point.6 intersecting with the ellipse we will have the points of one of the caternaries we will used to start
the form finding of our pavilion. To do it just need to calculate the others points to have the final lines we will use for it.
8 – In order to find the outside boundary as curve nurb we will need to calculate the vectors from the center of the ellipse to the points in Point.7.
Multiplying these vectors with differents parameters we will find the specific points of the external boundary of the skin pavilion.
9 – Just connecting points in Point.8 we will have the external boundary we have been looking for in order to go next steps.
10 – Moving the points in the ellipse we have from Point.7 in z (height) we will start form finding in 3D optimizing the best possible composition
11 – Create lines from the points we have in Point.10 and the ones we have from Point.8 in order to convert in caternary after applying some vectors to.
12 – Using the vectors we did in Point.8 in addition to others vectors depending form finding we will be workin on we will have the forces to applying
in our caternaries in Point.11
13 – From the caternaries after forces have been applied we calculate the skin surface of the pavilion lofting the curves.
14 – Sectioning the skin surface of the pavilion in Point.13 by xy planes using series in z we will have horizontal wireframe of the structure of the pavilion
15 – To simulate the aspects to the rope just applying volume by using pipe command to the horizontal curves we did in Point.14
16 – We do the same for the supporting structure offsetting the caternaries curves Point.12. Then applying loft to the curves. And extruding both sides the surface
17 – In order to finish our pavilion we will project the caternaries curves to the ground floor. Subdiving the curves we will achieved to have points for each curve.
Next we will make lines fliping the matrix if necessary to have the composition we need. After shifting and lofting we will have the supporting floor. Just
extrude the loft as surface in negative z to have the volumen simulating the floor.

Animation
Animated Systems is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at the Master in Advanced Architecture in 2018/19 by: Ignacio Bedia Pastor TUTORS:RODRIGO AGUIRRE, DAVID ANDRES LEON ASSISTANT:DANIIL KOSHELYUK