LEOBOT
The main idea of this project was to :
- Record human motion and use it to perform tasks using robotic arm in real time.
- Create a connection between the artist performance and the spectator by using projection mapping.
For the whole process, we decided to use clay engraving. Human participant will work on a 2d surface in human workspace and robotic arm will work in real-time on piece of clay (400 x 400 mm) in robotic workspace.
Clay panel wall of size 1200 x 1200 mm was used to project the visual effects generated using grasshopper and unity.
re-Visiting Craftsmanship
The human body fosters a wealth of tacit knowledge, especially in master-builders. The precious knowledge bred by these masters’ bodies is a precious repository of profound skills and embodied know-how. Following the development of industrial manufacturing much of this knowledge was lost. This project comes to celebrate the new opportunities that can emerge when expanding barriers – between the craftsman and the Robot, The analog and the Digital, The physical and the visual.
Inspiration

Concept
For the whole process, we decided to use clay engraving. Human participant will work on a 2d surface in human workspace and robotic arm will replicate the same motion in real-time on piece of clay (400 x 400 mm) in robotic workspace.
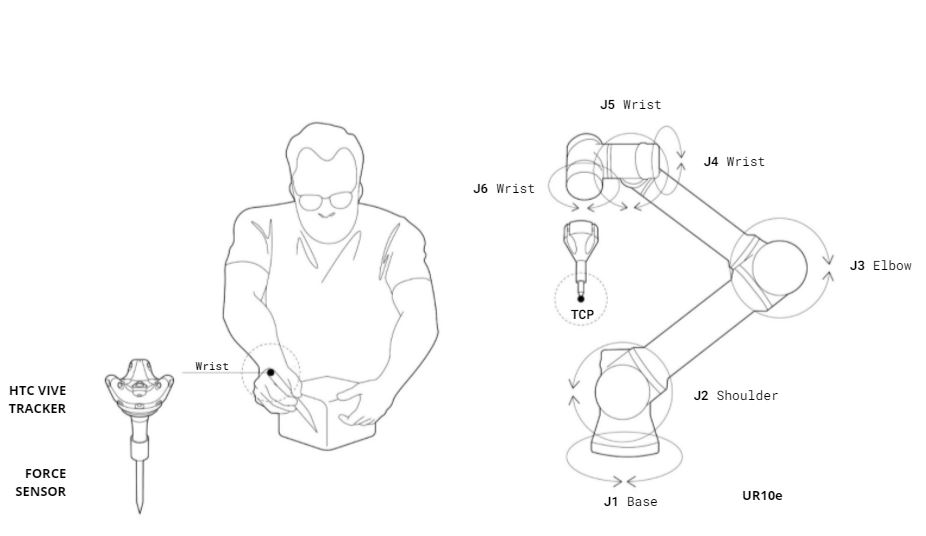
We used HTC vive tracker to transfer the human hand motion from human workspace to robot workspace.
ROS was used a mode to transfer the Vive tracker data to Robot. UR 10e robotic arm had been used in this project.
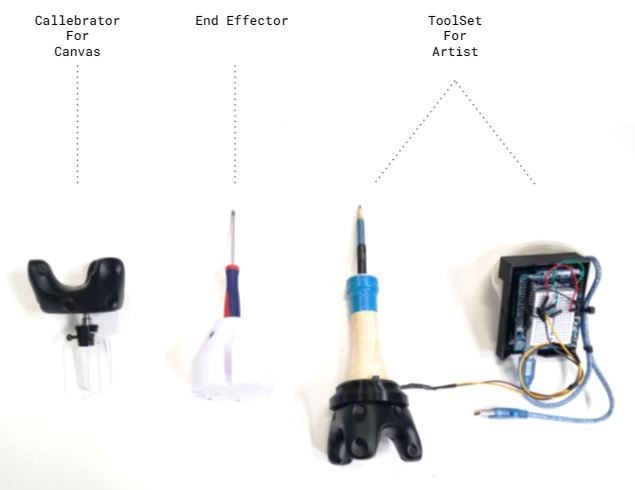
Tool
Artist tools – Custom designed tool is used in this project with force sensor fitted inside. The tool has a pen mounted. As the user presses the tool over the surface the force sensor inside the tool reads the reading and vive tracker is fixed on the top of the tool. Vive tracker helps to keep track of the human motion.
Robotic arm end effector – it is a 3d printed part with a pointed metal fixed as a end effector. any metal which can be helful in proper engraving can be used. In this case, we found a small flat head screw driver as an efficient tool for clay engraving.


Process
We decided to collaborate with a local artist (painter) who will draw on a 2d plane and w.r.t to the hand motion of the artist the robotic arm will perform clay engraving in its workspace.
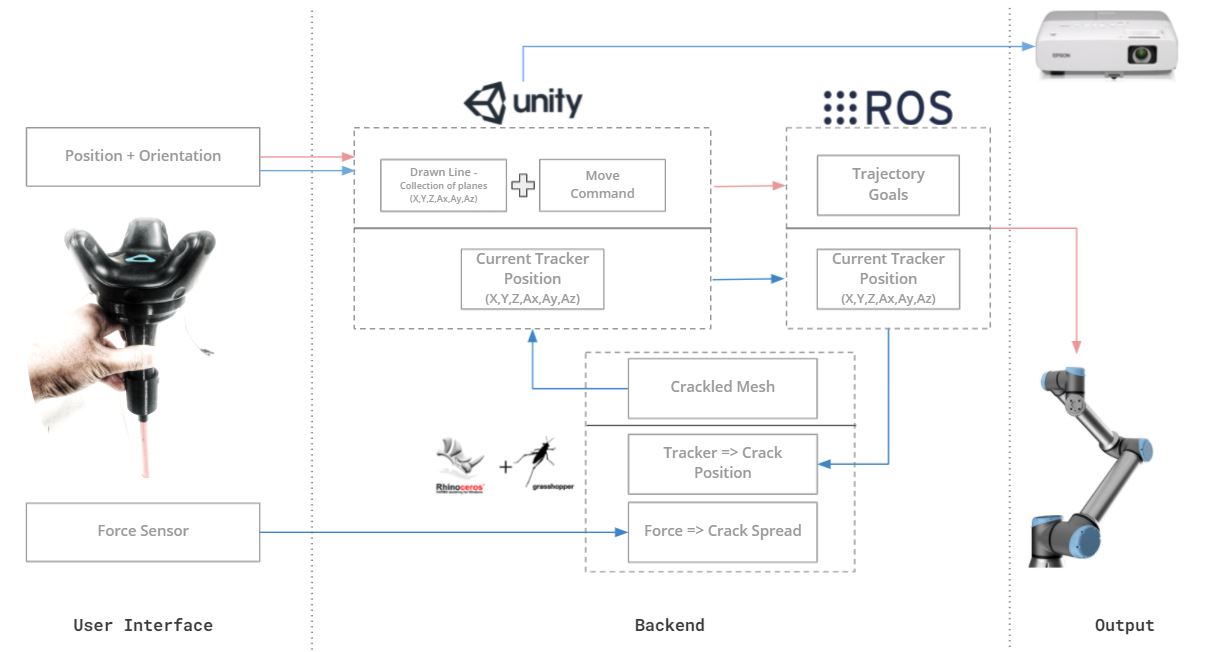
Project has 2 main process:
- Human-Robot – Artist uses the tool to draw on a 2d plane, the tool motion/hand motion is been transferred through Unity to ROS to Robotic arm.
- Visuals – As the artist presses the tool to draw different strokes and curves in his drawing. The force sensor will read the force data. Force data is then used in grasshopper to generate a glass crackling effect. The effect generate is transferred in Unity using Grasshopper-Unity plugin.
For the whole process we used, grasshopper, Unity3d and ROS.
Experiment and materials
The above image is recording of the artist sketching and robotic arm replicating motion over a clay piece (400 x 400 mm size).
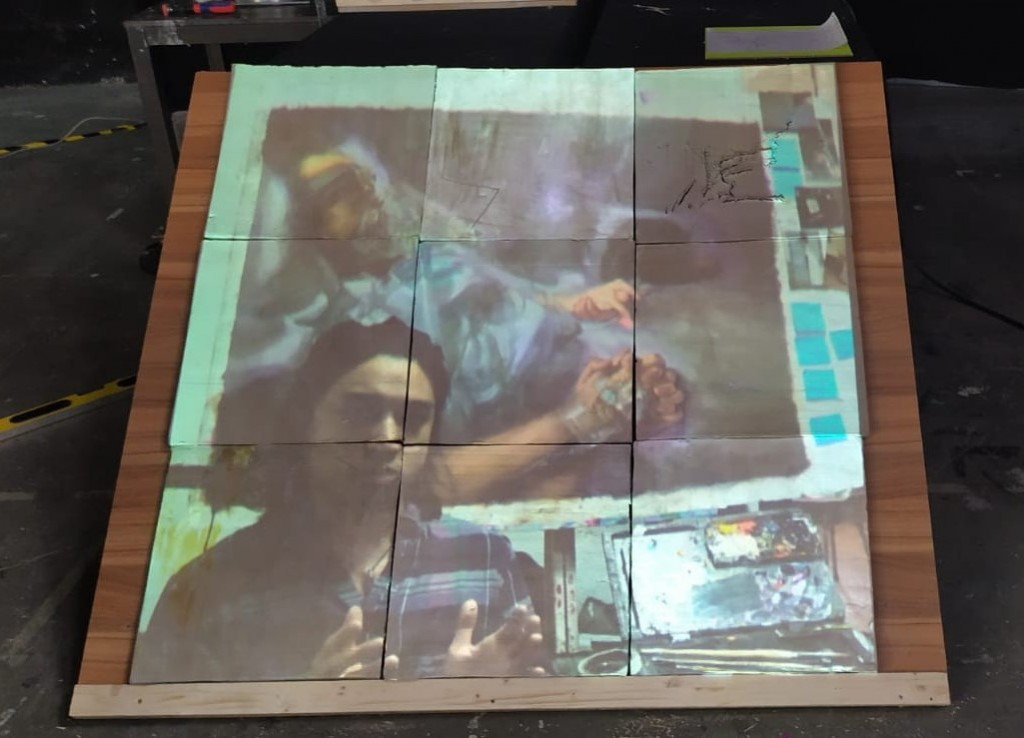
Above image is a snap of the projection over clay panel (1200 x 1200 mm).

Above image is the snap from projection mapping demonstration.
Output

Final robotic clay engraving output of robotic clay from experiment
LEOBOT // HARDWARE III is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction seminar in 2020/2021 by:
Students: Shahar Abelson, Charng Shin Chen, Arpan Mathe
Faculty: Mery Glez
Faculty Assistant: Daniil Koshelyuk