?? Tenkabe
Tenkabe is a project exploring the possibilities of robotics in the field of fabrication by using industrial robots to precisely bend rebars. The aim was to create a modular voxel that could be parametrically designed to grow in x, y and z axes, which would finally be a wall structure.
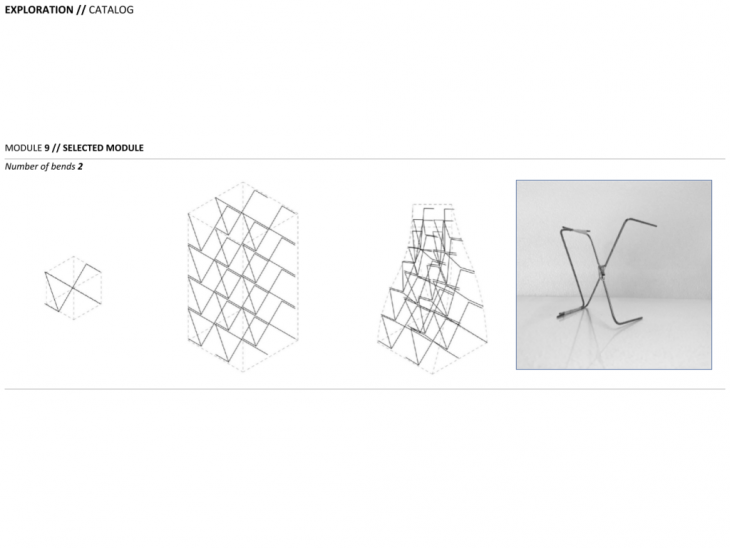
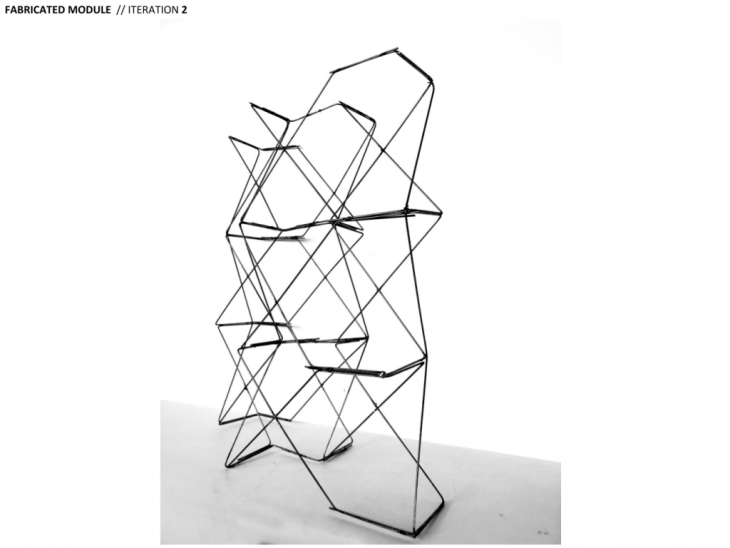
The first test was done by bending metal wire by hand to try out different forms.
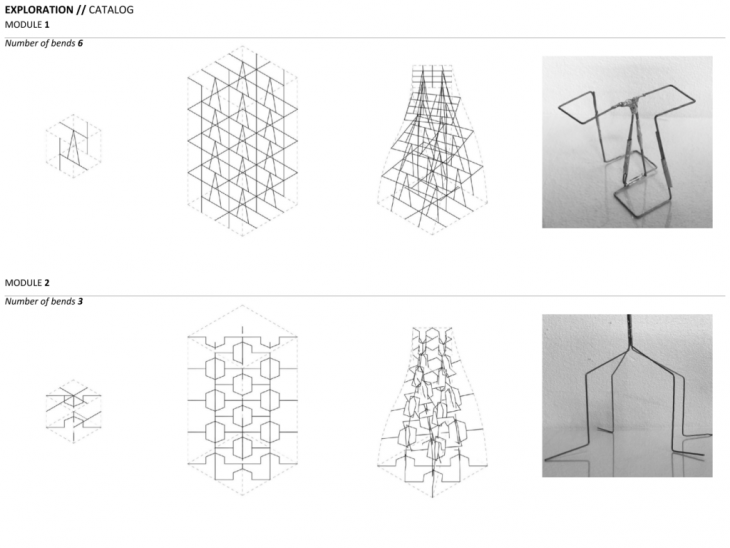
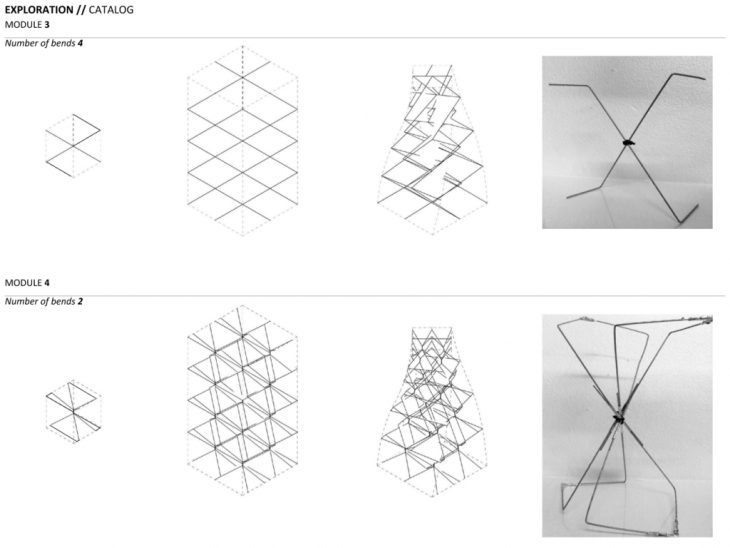
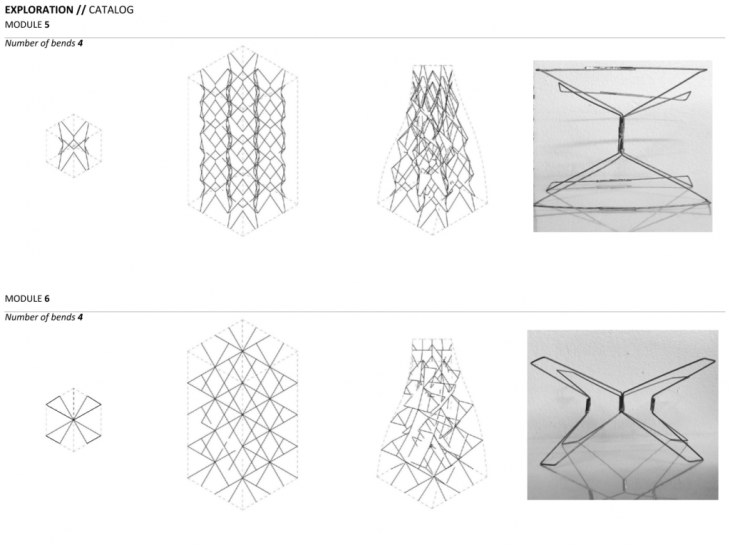
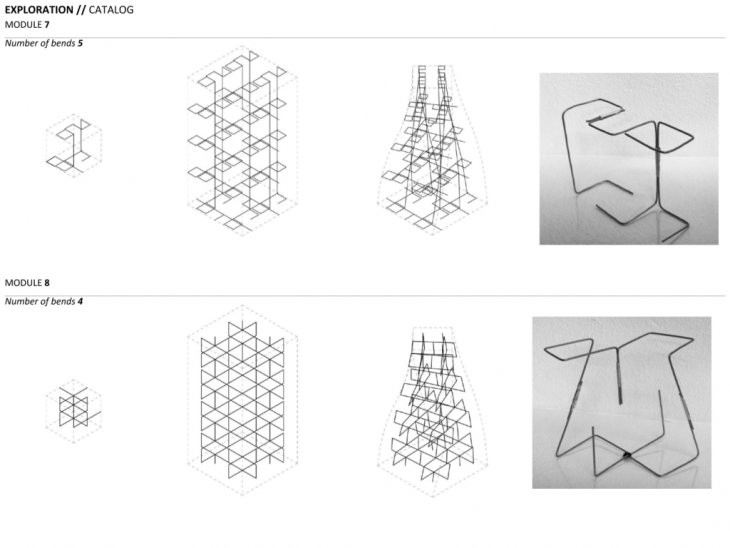
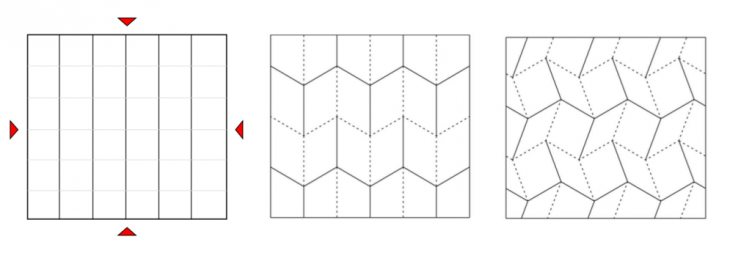
The final design structure takes inspiration from the principles of Origami.
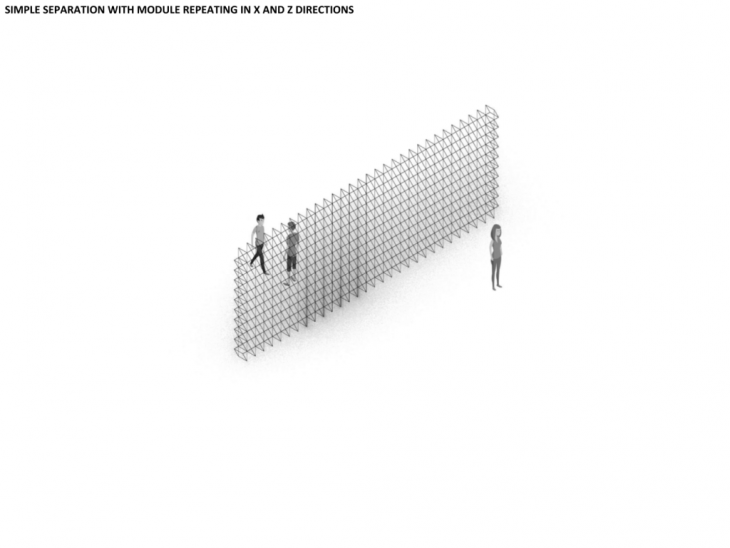
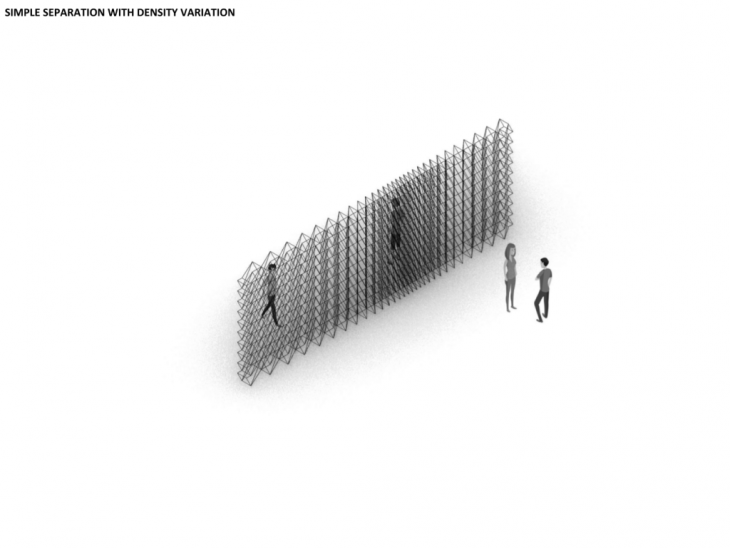
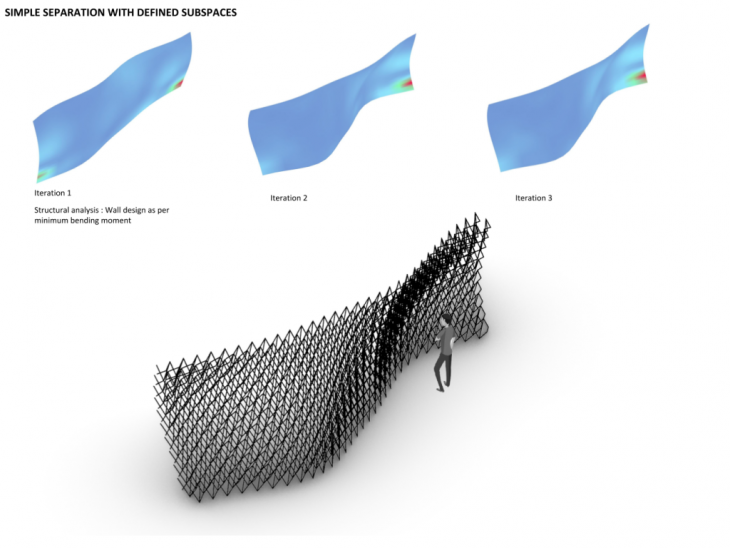
Origami (ori meaning folding and gami meaning paper) A few basic and systematic folds, give a paper not only a shape but also a structure. Designing our wall, we were inspired by Origami, and took the same principles of folding. The result was a wall with many possibilities, a one layered wall or a multi layered wall, that could grow in every direction, occupy the space or separate the space or even define the space.
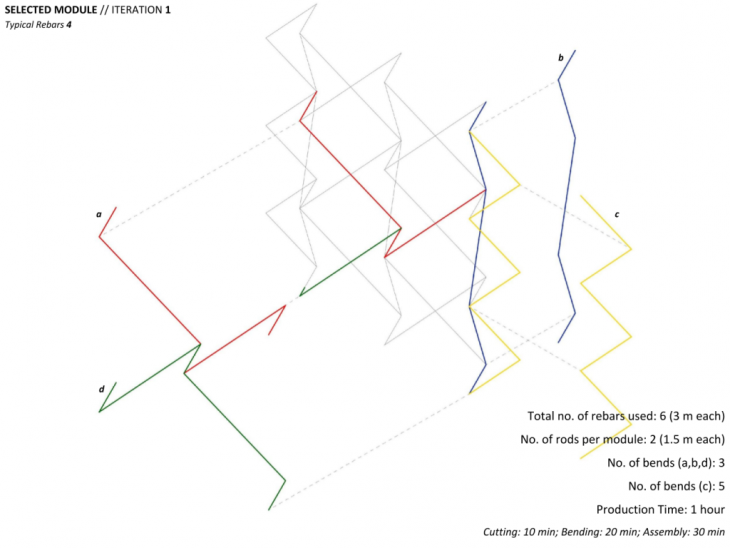
Iteration 1

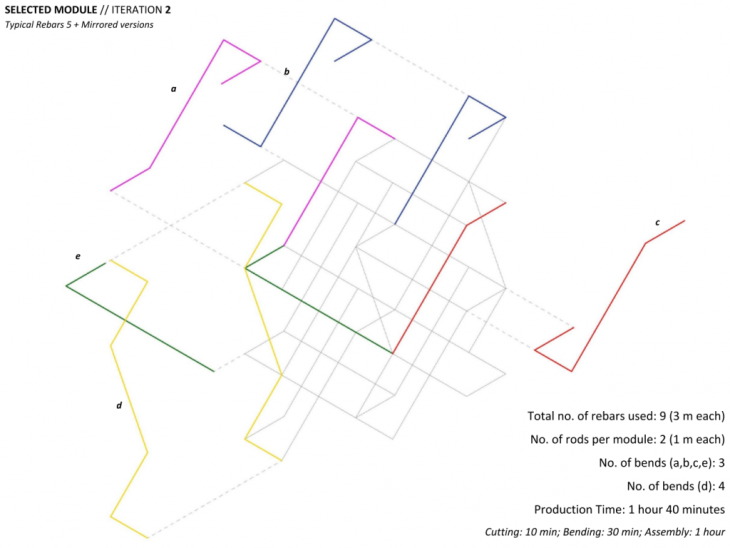
Iteration 2
Architecture Application
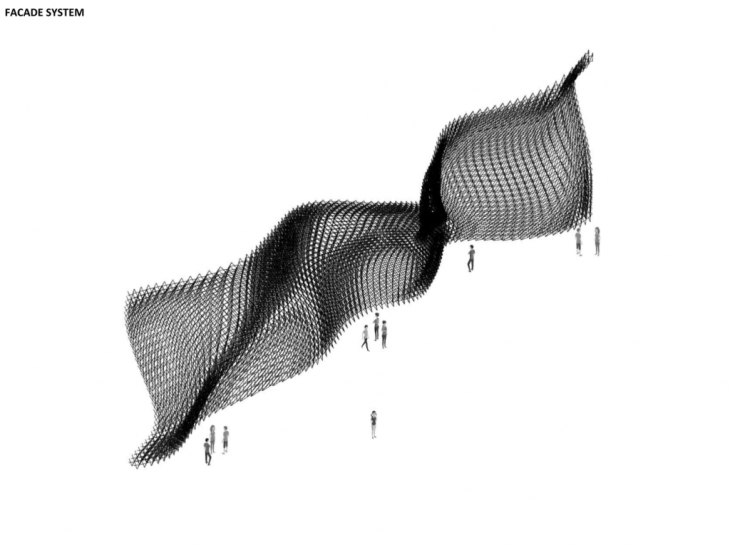
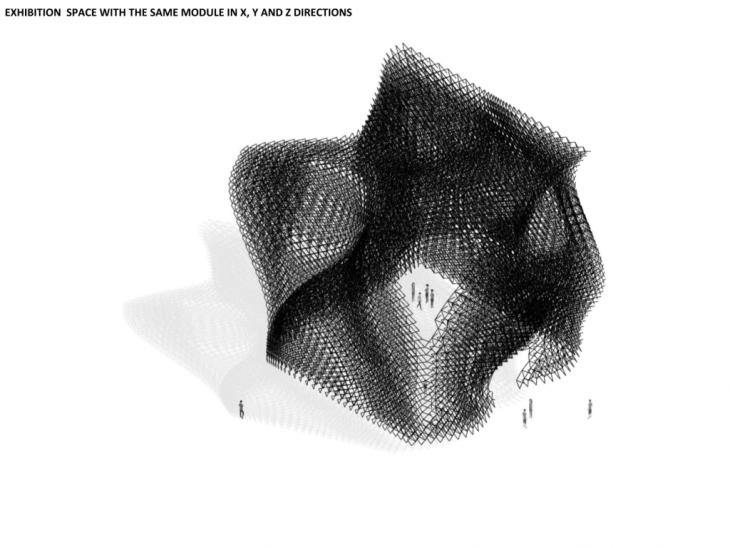
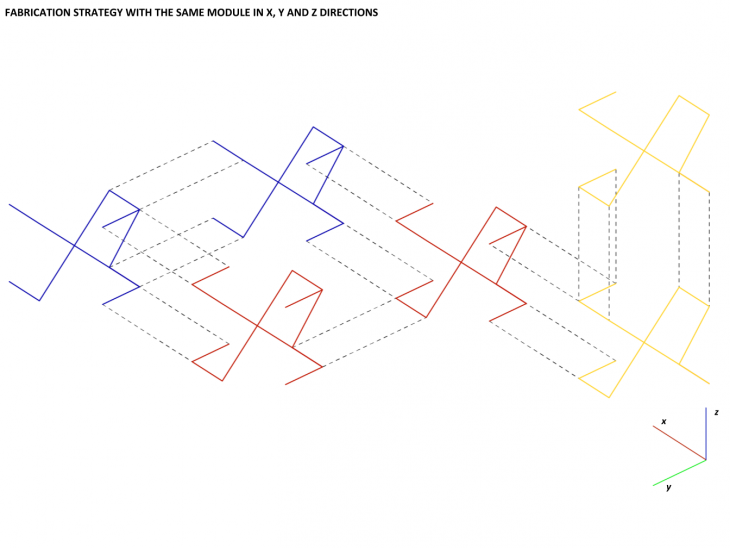
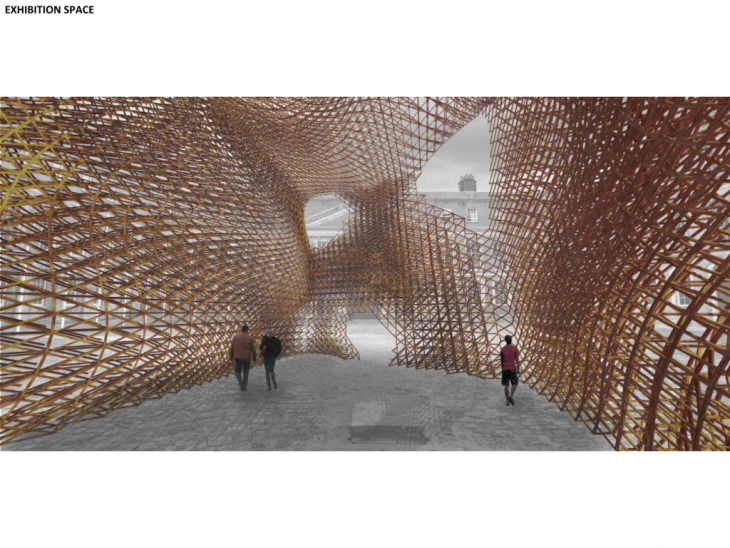
Taking inspiration from the UK Expo Pavilions of several years and using the same module, we have tried to create a system which can be an enclosed space, hence an exhibition space built of metal rods as this module can be repeated and attached to all X, Y and Z directions.
In terms of spatial definition, this module can be scaled and multiplied with respect to the particular site requirement and be made as shown in one example as ours.

Project name: Tenkabe // Advanced Robotics Fabrication
Tenkabe // Advanced Robotics Fabrication is a project of IAAC, Institute for Advanced Architecture of Catalonia
Developed at :
Master in Advanced Architecture
Faculty: Rodrigo Aguirre, Alexandre Dubor
Assistants: Ricardo Mayor, Nikoleta Mougkasi
Students: Anmol Arora, Tanvangi Asthana, Kammil Carranza, Lakshay Ghai, Vinay Khare, Nicolas Saade