Advanced robotics are enabled by the onboard software architecture. The onboard software is responsible for all the mathematical and cognitive aspects of the system, ranging from sensor data processing, perception, state estimation and localization, mapping, planning, control, and some others.
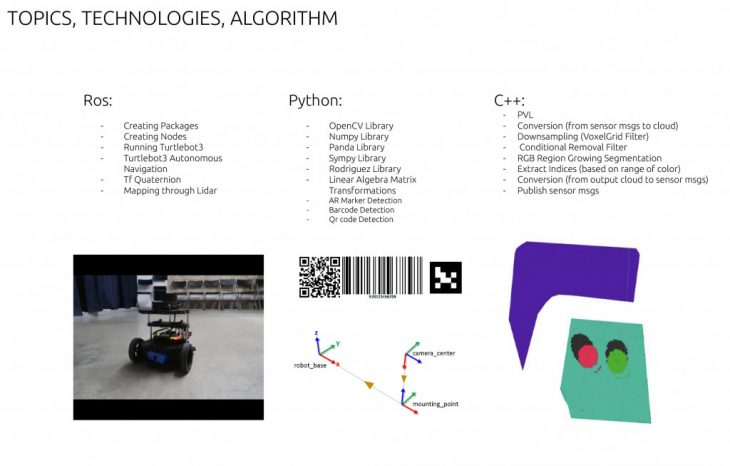
The Robot Operating System has become an extremely useful framework to speed up this process. Withing the MRAC Software 2 seminar, we learned how the different nodes communicate, which tools we can use to compile, visualize data, debug, etc.
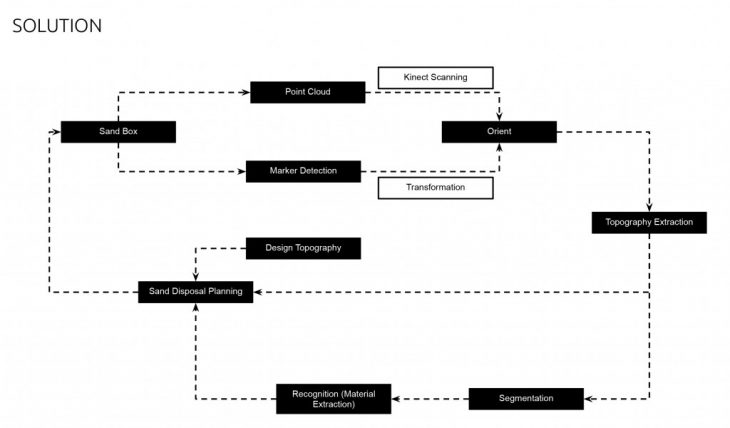
Integrated systems included point clouds, augmented reality markers and online programming to the control pc of the robot. Positioning was set up in the real-time that the software was continually orientated to the real world position of the robotic arm.


 NEXT STEPS
NEXT STEPS
- Complete the real-time loop to be automated with minimal human interaction
- Use professional level sensors to increase accuracy
- Scale up middleware to commercial scale for architectural and construction application
- Introduce secondary rover bot for scanning offsite
- Package the middleware in a self-contained application instead of disparate libraries and code reliant on external application
Faculty:
Daniel Serrano, Starsk Lara
Students:
Riccardo Mura, Ardeshir Talaei, Hazal Yilmaz
