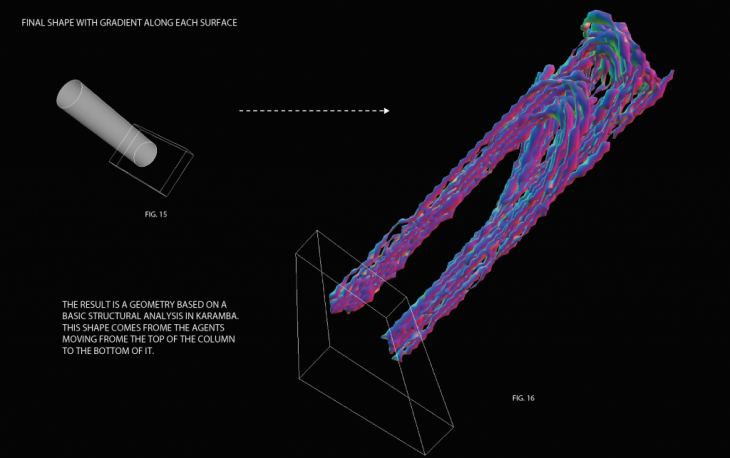
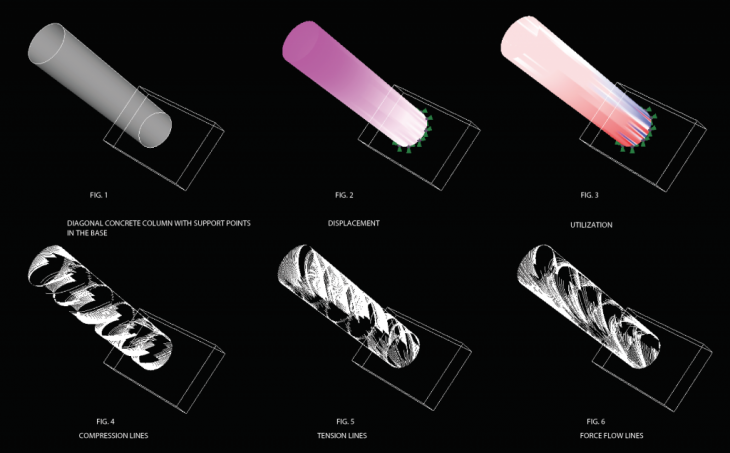
The aim of this exercise is to explore the stigmergic systems in grasshopper using external information as an input. The start geometry is a basic concrete column of 40 cm (diameter) and 150 cm (long) supported in diagonally from a base. The input is a structural analysis (force flow lines, compression lines, tension lines, displacement and utilization) extracted from karamba. This data (force flow lines) is conceived as the path that the agents are going to follow. The output is a different geometry based on many lines that are created following the agents behavior.
Analysis extracted from Karamba:
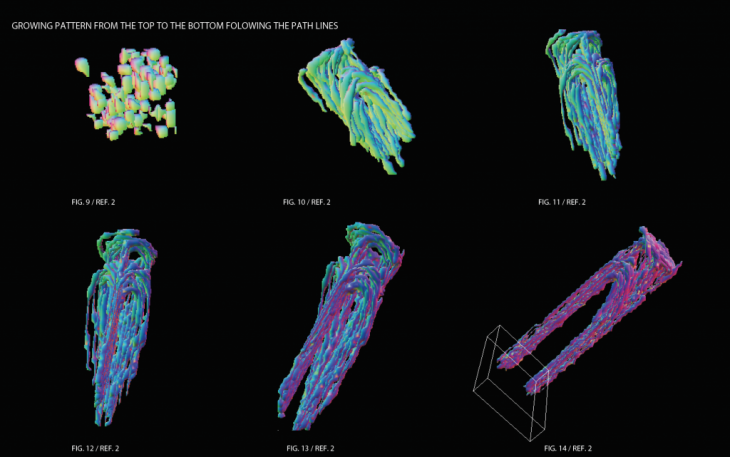
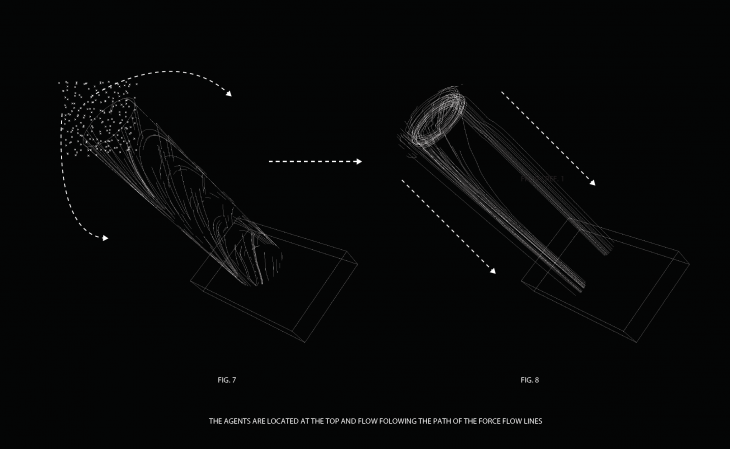
The starting point of the agents is in the top and they move around the FFL lines until they reach the base of the column:
This is the growing pattern that is created from the agents movement: