
*project as part of the MRAC W1.1 Force Form, focusing on incremental sheet forming, in collaboration with Eurecat
Space Filling is an open-ended exploration of mass customization through robotic incremental sheet forming.
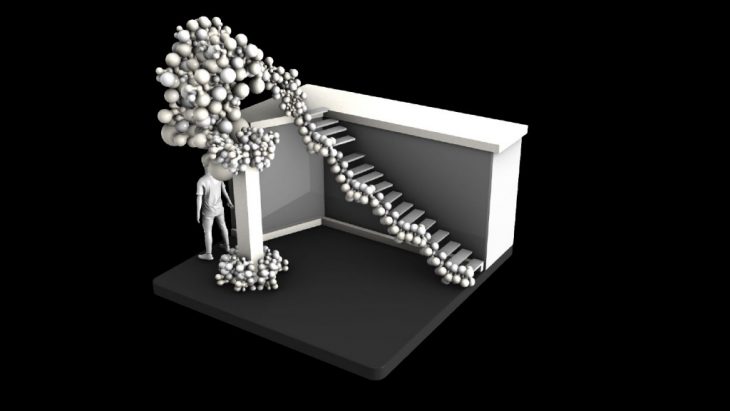
With the primary aim of pushing the boundaries of ISF and achieving three dimensional morphologies from a two dimensional aluminium sheet input, the project proposes a robotically fabricated modular reconfigurable building system with speculative applications in rapid prototyping, casting and scaffolding.
production strategy: push ISF draft angle tolerance
design strategy: self-stable jigsaw building modules
Starting from testing the innate behaviour of sheet aluminium and understanding the general parameters of robotizing the incremental sheet process, the project developed through empirical experiments flowing between the physical and the digital space.
_PROCESS:
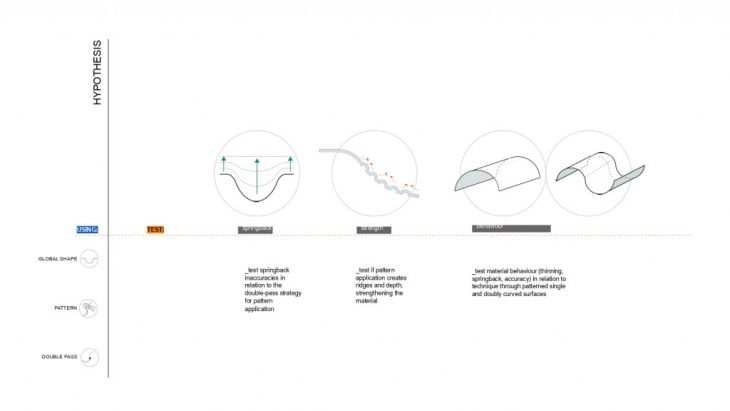
// hypothesis:
Focusing on material behaviour, the project hypothesis is centred around analysing the plastic and elastic properties of aluminium in contact with deforming forces, attempting to elaborate an ISF strategy that can accurately shape the material regardless of spring back.
The initial tests focused on testing the ability of creating localized surface conditions (such as rigidity/ flexibility, curvature/ blank) without causing tears in the material. The resulting strategy proposed using a “doubled” tool path, first deforming the material to generate a global shape, and then generating a space filling curve pattern in order to speculate on the occurrence of creases and ridges to increase the material stiffness.
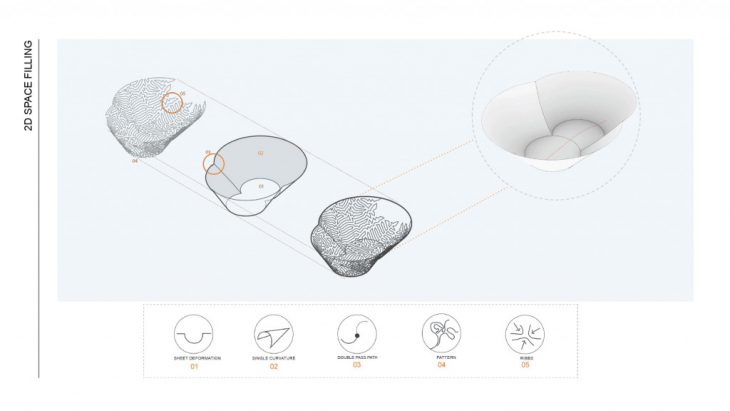
_test 01: 2D space filling (single curvature surface)
_test 02: 2D space filling (double curvature surface)
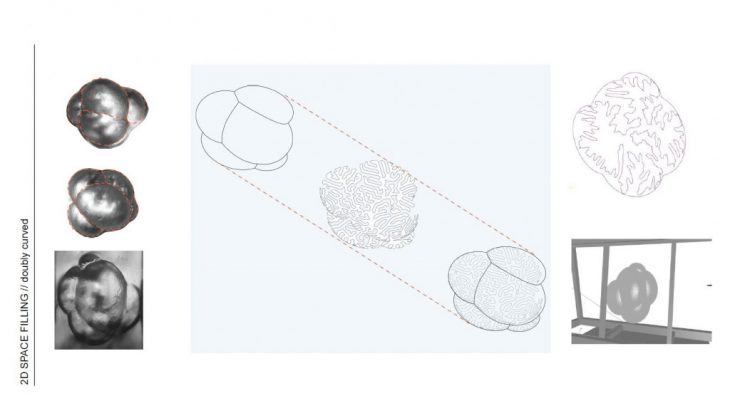
// analysis:
Following the initial production of patterned single and double curved geometries, unexpected surface deformations occurred as a result of the input parameters (tooltip orientation, step distance, normals orientation etc).
// proposal:
Throughout the testing phase, both the ISF technology and the material have imposed limitations the project took a chance at resolving- it became important to further test:
_the ability of creating doubly curved, topological morphologies (surfaces with multiple minimum and maximums) in mid-air, without the aid of a support tool
_reducing the aluminium breaking point (through increasing the maximum draft angle from 30 degrees horizontally by using a non-perpendicular tooltip direction)
With these further testing grounds in mind, ISF outlined the idea of rapid production and cost efficiency, that could then be further applied to a design hypothesis, testing:
_the ability to produce doubly curved moulds (through splitting a volume into halves or three parts for ISF production)
_the ability to generate serial building blocks rapidly for the purpose of prototyping (using expanding foam infills to cure the modules that can then be reconfigured and arranged in any configuration)
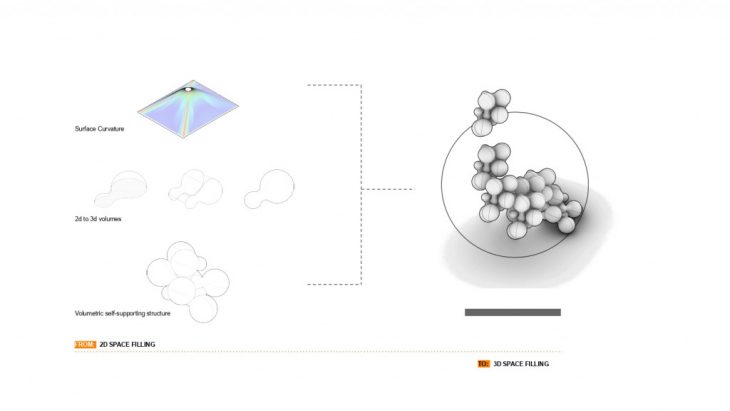
Answering these general goals, the proposal shifted from experimenting with two-dimensional space filling curves to three-dimensional space filling volumes. Therefore, the project proposes a modular reconfigurable jigsaw system, independent of any input geometries.

Potential applications:
// design:
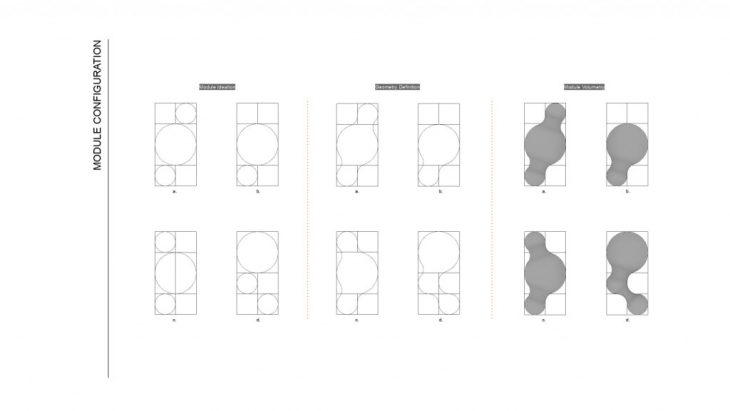
For the purpose of pushing the limits of ISF production, the example module was developed using blobous interlocking morphologies, allowing for a high tolerance degree and setting the background for further developing robotic ISF strategies in order to achieve spherical shapes without material breaks.
The design logic followed the idea of mass customization and achieving a diversified structure (facade, scaffolding system, pavilion sub-structure quick prototype etc.) through the use of a finite number of elements.
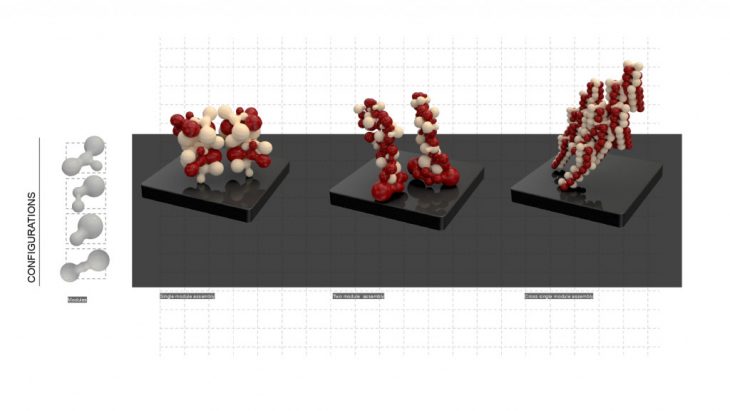
For the example pavilion generated for this project, only three modules in different sizes were used, outlining the idea that mass customization could effectively be achieved cheaply and rapidly through robotic ISF mould production.
// production:
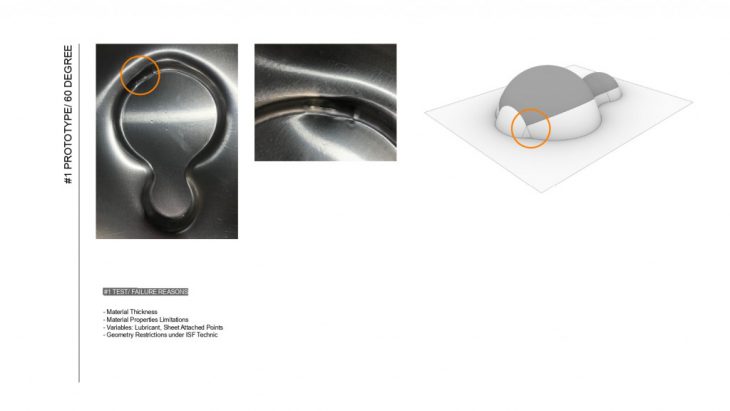
Into the production phase, three module types were proposed, varying in geometrical complexity. The modules were proposed to be split in three equal parts for production, in order to avoid surpassing the ISF draft angle of 30 after which the material experiments severe thinning and tearing. Large percent of the production experimentation has been carried on with the module displaying the less complicated geometry (containing spheroid morphologies with edge angles of 90 degrees).
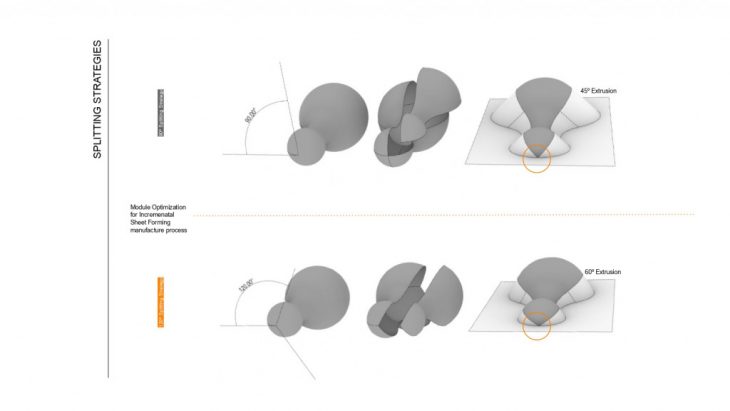
The attempt of surpassing the draft angle without generating any material tears has been ultimately unsuccessful in the timeframe of the workshop- however, the draft angle limit has been pushed to a maximum of 45 degrees, showing the potential of developing more able robotic ISF techniques in the future.
Metaball production:
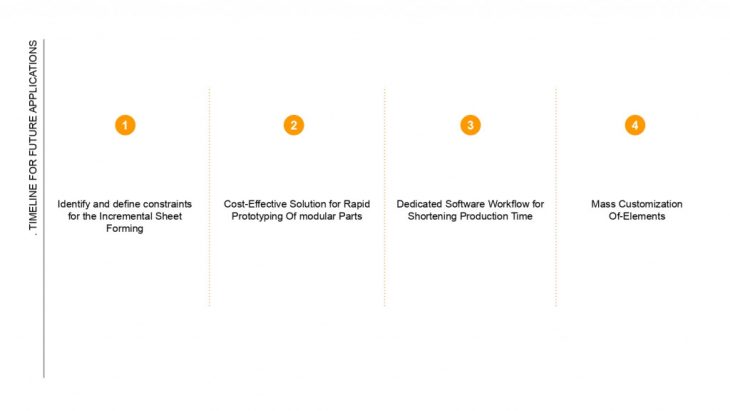
Based on this conclusion, potential future developments of robotic ISF techniques could be:
Space Filling is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at Masters of Robotics and Advanced Construction in 2019-2020 by:
Students:
Abdullah Sheikh, Andreea Bunica, Anna Batalle Garcia, Matt Gordon, Lorenzo Masini, Jun Woo Lee
Faculty: Kunaljit Chadha, Laura Puigpinos