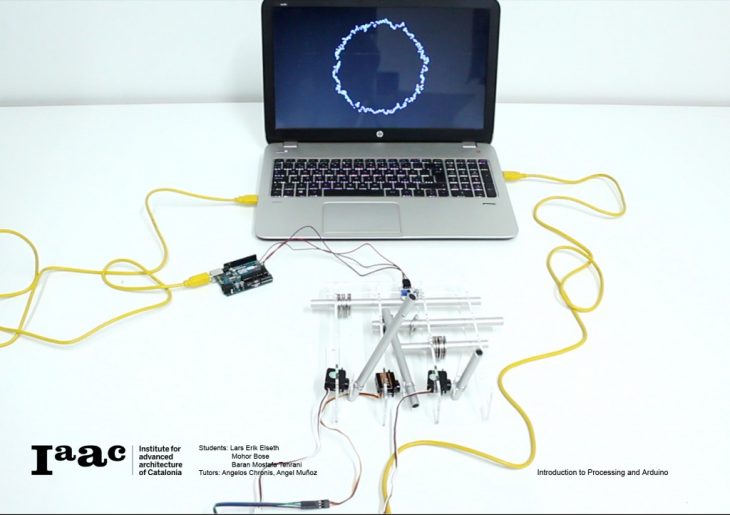
Sound Swarm Set-up
‘Sound Swarm‘ is a project by Baran Tehrani, Mohor Bose. Through playing with instrumental qualities we aim to recreate and map sound as particles in space.

Robotic Xylophone
Elements that we use:
3 × Mallets
1 × Acrylic structure
3 × 180° servo motors
1 × Sound sensor
2 × Arduino
3 × Buttons
Physical Construct:
We set up a an instrumental framework inspired by the logic of a xylophone. The frame acts as a placeholder for 3 different metal cylinders which will be used as ‘sound surface’ for our mallets. The mallets are similarly, cylinders of metal, each attached to a servo that rotates. The servo rotates based on a button input and cause the mallet to hit the xylophone as it rotates.
We use a sound sensor to detect the data and then remapping it into a desired range before sending it to processing.
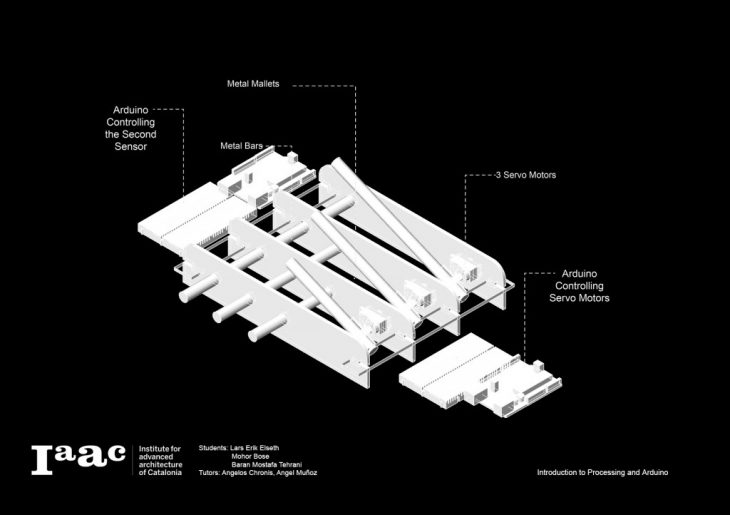
Robotic Xylophone Drawing
Arduino-Processing:
While in Arduino we want to make sure that the data we are collecting are gradually stepped in order to create a smooth animation. For this we can use the built-in sketch ‘Smoothing’ which will calculate the running average of our sensor output. Once we have this we can move to Processing. Here we call our remapped sound values from Arduino and use it as variable to distort a point collection. The remapped values set parameters for the point position and colour. First we set up a code that places an amount of particles in our sketch and then we want to move them by scaling using point positions x and y.
We now have our ‘Sound Swarm’ working, which let’s you operate a xylophone inspired instrument, while seeing the consequent visual affect in processing.
‘Sound Swarm‘ is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Advanced Architecture, SO.4 Produino in 2017 by:
Students: Baran Mostafa Tehrani, Mohor Bose
Faculty: Angelos Chronis and Angel ?Muñoz