SET CAST // STUDIO III
Concrete is an extremely flexible and versatile material, integral to the contemporary construction industry with a long history of use and little indication it will stop soon, despite its negative impact on the environment as a major source of carbon emissions. Generally concrete is not seen as an “efficient” material, especially in the context of structural applications, where the forms tend to be massive and blocky, designed for ease of construction and little regard for material consumption.
Alternatively the manufacturing of complex forms in concrete can often be a wasteful process with single use molds made from toxic materials and difficult to construct. This project aims to bridge this divide bringing accessibility to complex geometric forms devised specifically for structural optimization. By optimizing the structural capacity vs the material consumption of concrete and simultaneously optimizing the manufacturing process by reducing the number of discreet molds by designing for repeatability and durability, we can unlock new potential for an amazing material that has experienced relatively little development for several centuries.

Concrete is capable of being used more efficiently with thoughtful consideration given to the casting process and utilizing intelligent geometry.
FIRST ITERATION // WORKSHOP 1.2
The first iteration was completed as part of the Print and Cast workshop done in the first semester.
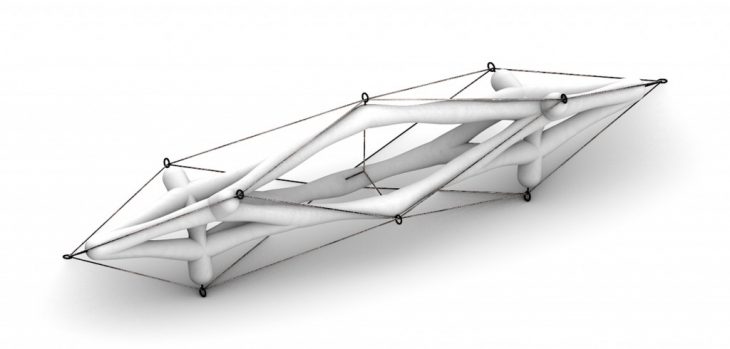
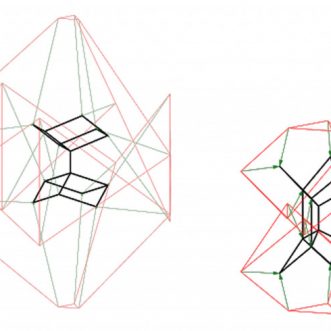
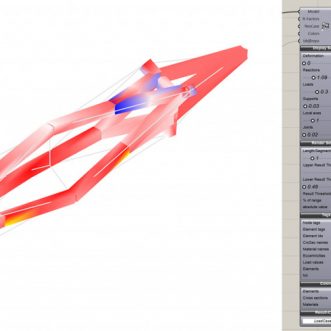
We started by using 3D graphic statics, a method to design 3dimansional geometry based on the underlying force vectors our structure is going to take. Then we performed structural analysis with karamba3D and made the final changes to the geometry. After the geometry was defined we split it into parts and those parts into molds.

Finally we 3d Printed the molds using the single line technique with KUKA robotic arm, assembled and cast them.
SECOND ITERATION
Improvements
We began the second iteration by identifying major areas in the design and process of the original for improvement.
What we focused on was:
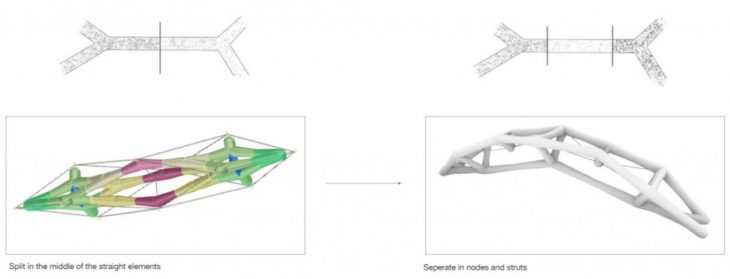
Molds separation:
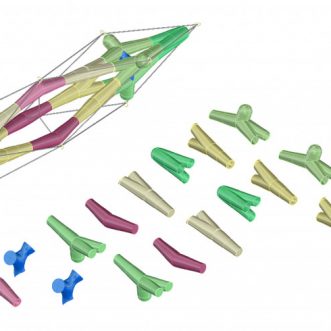
Instead of spliting the parts in the middle of two nodes, we introduced the idea of spliting closer to the nodes, creating some straight parts that we call struts. This way the assembly process becomes easier and the parts are smaller and easier to control.
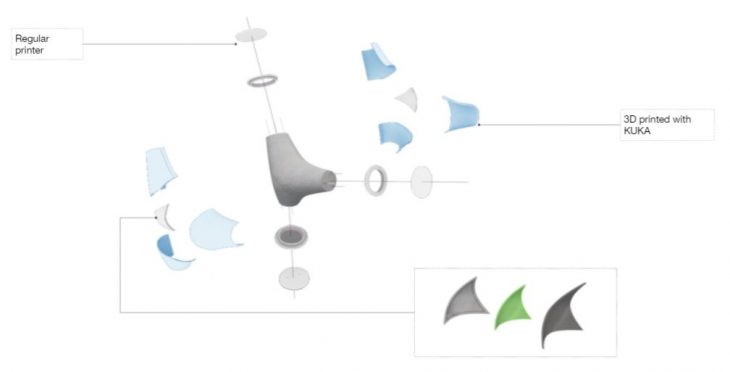
Joinery between mold parts:
Going deeper into the molds our main goal was to produce durable, reusable molds. We started by spliting the molds in more parts and printing the central ones with the robotic arm and the connections with regular 3D printers. What we gain from this is strong and fast prints for the central bigger pieces and accurate connections from regular printers.
Casted parts separation:
Next big change was the way the parts are casted. Instead of casting each piece one by one we are casting the nodes that touch together as rings and we connect them with the struts (that are casted seperately). To come to this decision we took into concideration the order of the assembly, the total weight of the casted pieces, and the number of molds for each cast.

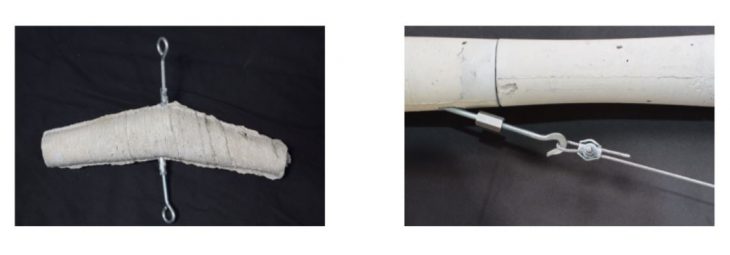
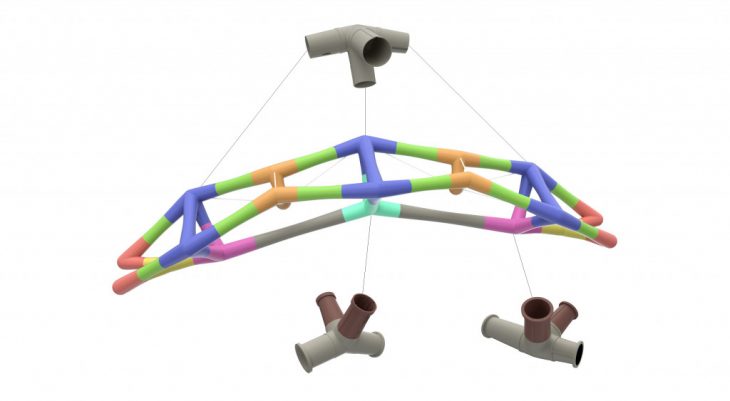
Joinary between the casted parts:
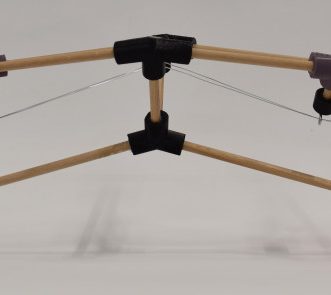
The connection between the casted parts is a really important part that during the first iteration was not developed. For this iteration we developed a rotating connector that reduces the risk and the time of the assemble. By rotating a strut between two nodes the connector gets skrewed both ways simultaneously.

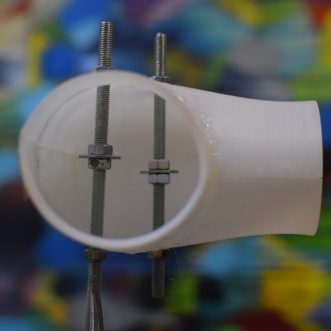
Attachment of the cables:
An important improvement was changing thse direction of the embodied parts from perpendicular to parallel to the force that is produced from the cable.
Reusable molds:
We are making repeatable parts to make the fabrication process faster and easier and reduce the material we use. The design approach has two levels of repeatability. We have repeated molds in the geometry as we can see on the top part, but also repeated parts of the molds even in different molds as we can see on the bottom part of the diagram.
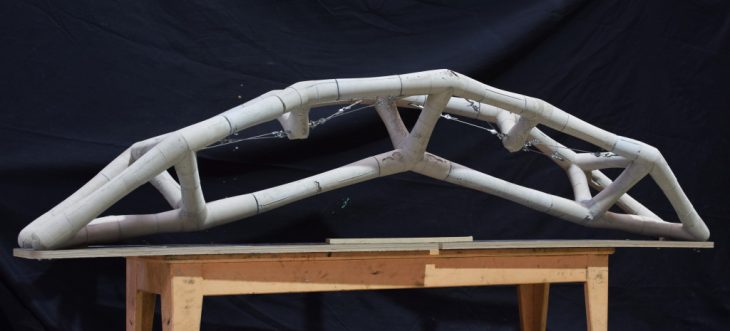
Hypothetical scenario
We made a hypothetical scenario where we designed a bridge across a 10m gap. What we are trying to understand here is how, by introducing the knowledge and methodologies mentioned can we design structures that are lighter and stronger and what are the benefits and limitations associated with the technique. We started from the simplest working design yet least efficient and added geometric complexity to increase material efficiency until we reached a point of diminishing returns – meaning the point at which the gains in structural / material consumption efficiency are out weight by the complexity of construction, quantity of unique parts, and cost of manufacturing.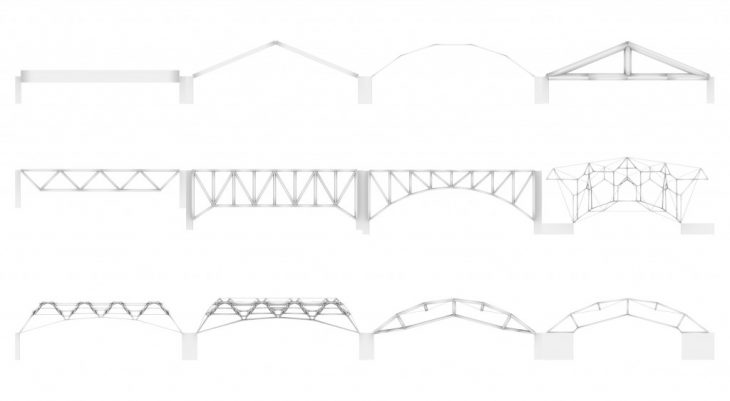
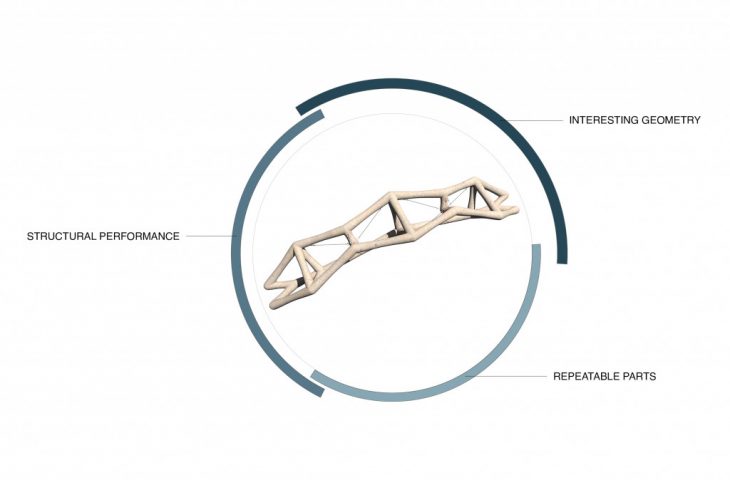
Selected geometry to fabricate
Our criteria was to find a system that would balance structural capacity with material consumption and ease of fabrication. According to those criteria, the selected geometry was tested both in Karamba 3D and with physical experiments in small scale. Additionally, the geometry has a high repeatability in the molds making the fabrication process faster and saving printing material.
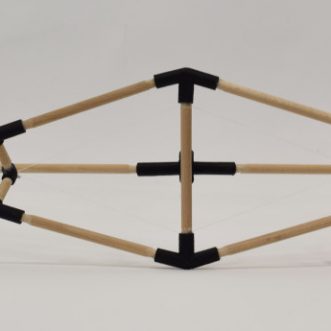
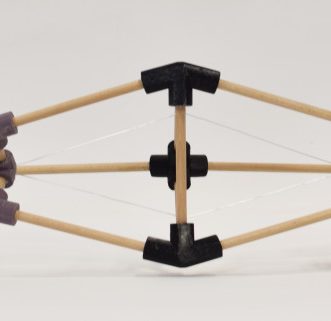
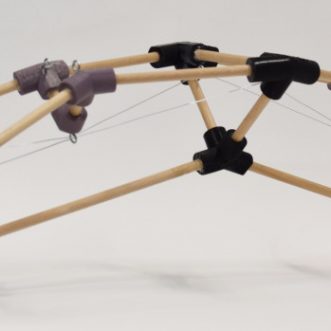
Manual Exploration
Before we started making the concrete model we made a 1/10 scaled model to help us better understand the geometry. Understanding the weak points of the design we made a third iteration that improved the design.


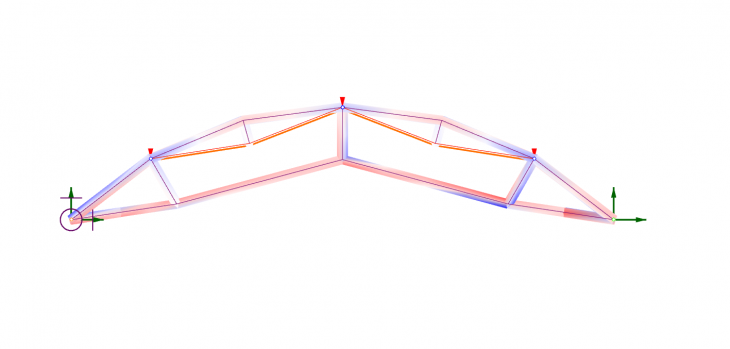
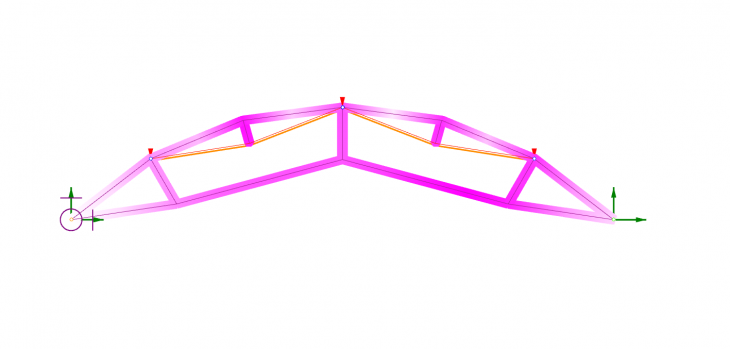
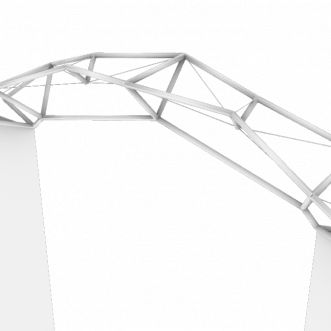
THIRD ITERATION
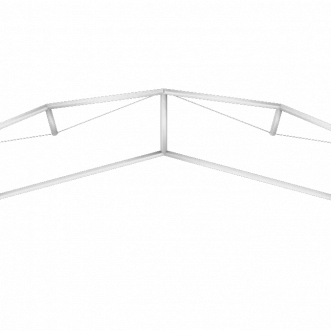
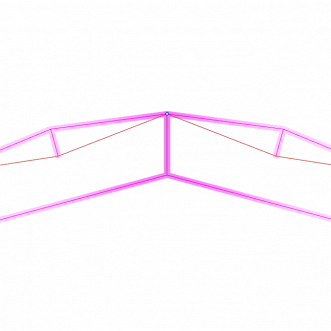
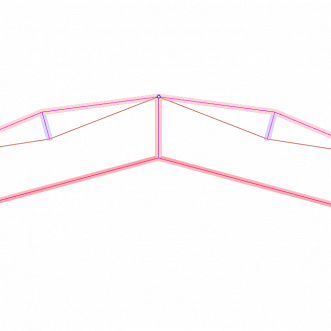
In the third itteration we focused more on the structural performance, respecting the repeatability concept and the ease of the fabrication process at the same time. To enhance the structural perforamnce a third support point was added to each side, but most importantly the cables extended to the end of the geometry transfering the tentioning forces to the support points.
FABRICATION PROCESS
1/5 SCALED MODEL
EARLY DEVELOPMENT



DETAILS



GENERAL
1/1 MODEL

VIDEO
</p>
FUTURE DEVELOPMENT
We imagine making huge structures to support railways, highways or other large infrastructure where efficiency and repeated forms are critical. For the assembly process are developing the MR Assistant (mixed reality assistant), an application for hololens and android devices that provides the builder a 3D model of the structure and a big variety of features.
Here is the link for this project:



SET CAST is a project of IAAC, Institute for Advanced Architecture of Catalonia developed
at the Master in Robotics and Advanced Construction in 2020/2021 by:
Students: Michael DiCarlo, Orestis Pavlidis
Faculty: Alexandre Dubor, Aldo Sollazzo
Faculty Assistant: Soroush Garivani, Ashkan Foroughi, Antoine Jaunard