ROBOTIC MOSAIC / FLUID FIELDS // W.2.1 WORKSHOP
The project ROBOTIC MOSAIC / FLUID FIELDS consisted of a week-long exploration of the possibilities of merging robotic assemblies with materiality.
FLUID FIELDS is inspired by optical illusions that show a clear path and direction. The idea is based on the use of machine vision to recover leftover ceramic debris from construction waste and generate a real-time recognition and design system to be able to let a robot fabricate autonomously with randomly placed pieces. The play with magnetic fields, the exploration of clusterization of shape and size combined with various numbers of attractor points are the parameters for this system.
Workshop Overview
The focus of this intense workshop was to navigate the use of machine vision to reuse pieces leftover from ceramic debris. By the end of the workshop, we had designed a system that could have an input of a set of random ceramic pieces and output a strategic design using the UR (Universal Robot) and ROS.

Construction waste in the EU, 2018
Setup
An investigation into the setup of ROS [robot operating system] and OpenCV within a Linux distribution and the established connection to Rhino and Grasshopper in Windows.
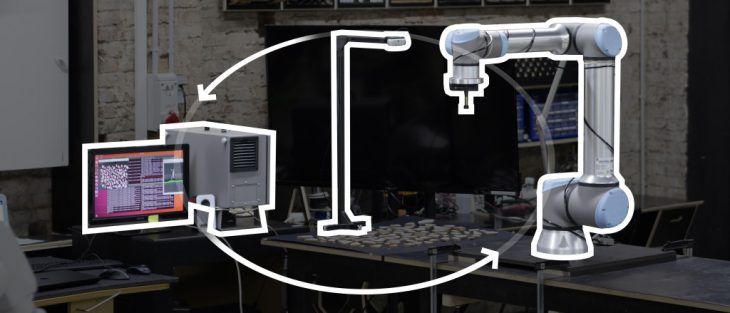
Robot-Setup: Camera -to- OpenCV -to- Grasshopper -to- Robot
The use of OpenCV and a RealSense Camera to detect a set of random pieces [in real time] in order to extract their contours that will be used as the input to our system.

RealSense Camera recognizing the tiles placed below
We extracted the contours into Grasshopper and used the lines as an input to a system that was able to use the contours to create a mosaic pattern. By extracting the contours, we were able to detect the size/ area and the prominent direction of each piece.
Use of OpenCV for feature recognition like tile contours and colors
Preparation
We were given a set of ceramic pieces varying in size, due to the restriction of a single tile measuring 30cm x 30cm we broke several of the ceramic pieces to aim for an intricate and refined pattern.
The process of breaking the pieces required no measurements, as the idea is to create a system able to handle all kinds of debris from a construction site.
Preparation of various tile sizes
Magnetic Field Approach
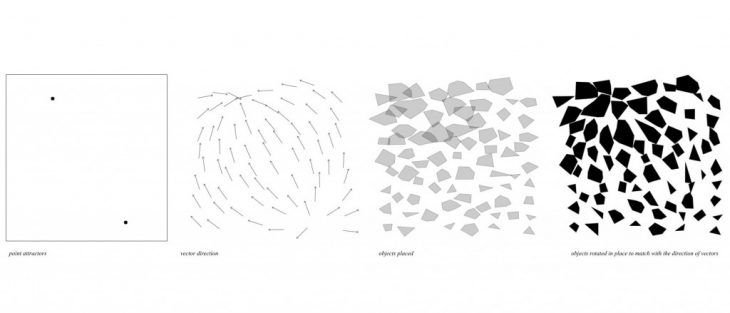
Our system consisted of an ‘attractor’ approach; inspired by optical illusions that show a clear path and direction.
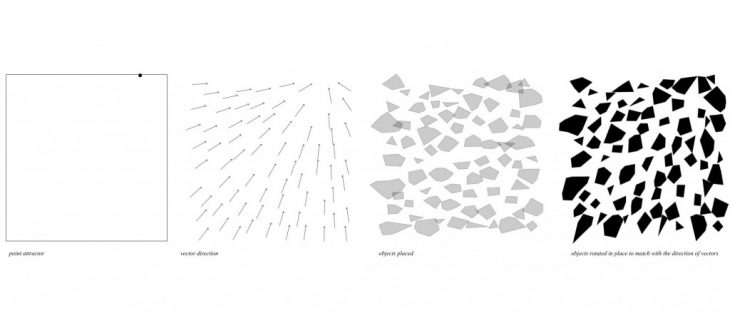
Magnetic field with single attractor point
Magnetic field with two opposing attractor points
We explored the placement and number of attractor points. For the purpose of this exercise, we focused on single and multiple points and used the minimum amount of pieces [30-40] needed so that the final output could still indicate a clear flow and directionality. Upon placing the attractor points and detecting the directionality of the vectors, attracting or repelling, we placed the objects first randomly, then tuned each piece according to its size and the direction of its ‘pointiness’. Within Grasshopper, we used Kangaroo to account for any overlapping pieces.
Final digital iterations
Robot Simulation
Simulation of the randomized stock being recognized and robotically fabricated to create the final design output.

Robot Simulation

ROS and OpenCV implementation
Fabrication
The final fabricated tile versions below explore both multipoint and single point attractors. At this scale, it is much easier to visualize the directionality of the pieces when using a single point attractor [second and third image below] rather than using multipoint attractors [first image below].

Final fabricated tile versions

Video of the intense workshop week and the fabrication process
Application
To create an interesting realm to apply the new mosaic schemes on a larger scale within Barcelona, a public pool for Barceloneta’s shoreline was proposed.

Barceloneta Beach

Top View
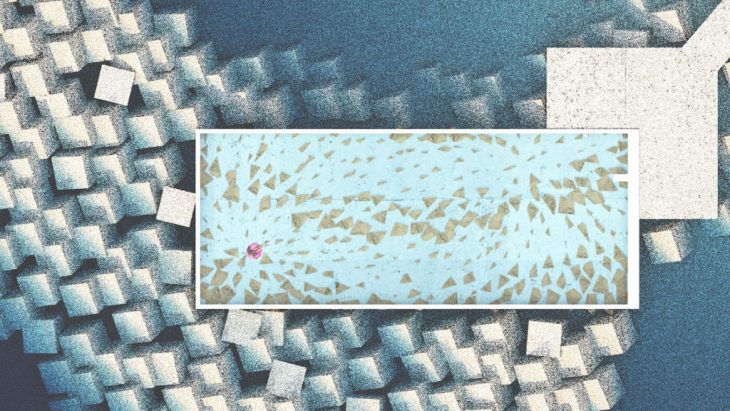
Public Pool between wave breaker
ROBOTIC MOSAIC / FLUID FIELDS // W.2.1 is a project of IAAC, Institute for Advanced Architecture of Catalonia
developed at Master in Robotics and Advanced Construction Workshop 2.1 in 2020/2021 by:
Students: Hendrik Benz, Aslinur Taskin
Faculty: Angel Muñoz & Alexandre Dubor
Faculty Assistant: Soroush Garivani
Workshop Participants:
Shahar Abelson, Hendrik Benz, Alberto Eugenio Browne Cruz, Charngshin Chen, Michael DiCarlo, Helena Homsi, Arpan Mathe, Juan Eduardo Ojeda Valenzuela, Orestis Pavlidis, Aslinur Taskin