Workshop 3B | MRAC 2018-2019
Faculty: Johannes Braumann
Faculty assistants: Kunaljit Chadha | Amir Bastan
Project by: Andrzej Foltman | Filip Bielicki | Jean-Nicolas Dackiw | Soroush Garivani
Workshop Overview
In the context of digital design and digital fabrication, machines and robots are always programmed with no tolerance. While, in the physical world, that is not the case as there are always these inaccuracies that are hard to predict. That’s why, in an attempt to address such limitation this workshop focused on:
- Splitting a large, complex task into a series of small, easily programmed tasks that rely on sensor feedback to inform their parameters.
- Optimizing the robot’s capabilities, utilizing its strength and accuracy, while relying on manual assistance for steps that the robot cannot perform.
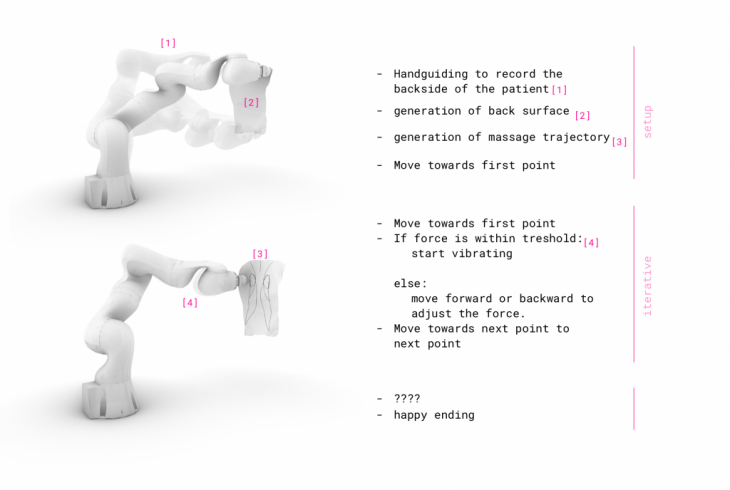
Robotic Massage
In this project we explored different possibilities of using real-time sensor data feedback in our robotic process in order to perform tasks that are hard to predict and need adaptability in real-time, such as robotic massage!